固定鴨舵雙旋火箭彈彈體繞流的數值研究
2021-07-05 02:31:26于紀言王曉鳴
彈道學報 2021年2期
馮 斌,于紀言,王曉鳴,王 鈺
(南京理工大學 智能彈藥技術國防重點學科實驗室,江蘇 南京 210094)
精確制導組件是一種擁有固定舵偏角,通過旋轉通道與彈體解耦實現自發電和彈道修正的低成本彈道修正組件[1-2],因此有這種布局的彈丸也叫雙旋彈。由于可以通過傳統旋轉彈藥加裝組件實現無控到有控的飛躍,因此精確制導組件技術是低成本有控彈藥技術的主要發展方向。精確制導組件的氣動外形[3-4]通常包括了一對同向偏轉的差動舵和一對反向偏轉的操縱舵,差動舵用于維持組件的轉動,操縱舵則來產生氣動修正力。
對于加裝了修正組件的傳統彈藥,其氣動外形發生了改變,在傳統的旋轉彈的基礎上加入了鴨舵,因此其氣動特性發生了改變。鴨舵對于彈體外流場的影響直接關系到彈丸外彈道飛行的穩定性及修正能力。目前對于雙旋彈的氣動特性研究主要分為全彈氣動特性研究和關鍵部件設計兩類。對于全彈整體的研究,程杰等[5]利用數值計算研究了雙旋彈氣動外形的改變對于彈道射程的影響;錢龍[6]、徐輝雯等[7]利用數值計算研究了全彈進動時的氣動特性;潘雷等[8]研究了迫彈加裝修正組件的氣動特性。對于部件的設計,汪亞利等[9]利用數值計算研究了鴨舵的高度和舵偏角對于全彈氣動力的影響;沈皓敏等[10]利用數值計算研究了雙旋迫彈的翼型參數對于穩定儲備量的影響;劉琦等[11]同樣使用數值計算研究了雙旋迫彈的舵偏角的影響。
目前對于雙旋彈的研究缺少對于鴨舵-彈體干擾的影響,尤其是鴨舵產生的渦系對于彈體的影響。本文將對某加裝精確制導組件的旋轉穩定火箭彈外流場進行數值計算,并對鴨舵渦系進行辨識,定性分析其外流場,并對其受力進行定量對比。
1 數值方法
1.1 方法介紹
本文數值計算采用有限體積法(FVM)。選擇彈身周圍的空氣域生成計算域,為了減少彈丸附近的擾動對于遠場邊界的影響,空氣域的尺寸選擇100倍特征長度。
本文使用圓柱形的計算域,圓柱的2個端面分別距離彈頭和彈尾10.7 m,直徑為10.7 m,同時適用于亞音速、跨音速和超音速工況,圖1為計算域示意圖。

圖1 計算域示意圖
與此同時建立彈體坐標系,原點位于全彈的質心,x軸與彈軸重合指向彈尾,y軸垂直于彈軸指向上方,z軸與x軸和y軸符合右手關系。本文使用的是固定模型,修正組件的操縱舵位于水平面內,修正力指向y軸方向,即為飛行試驗中起控的狀態。
將所選取的空氣域離散為海量的六面體網格,整體采用“O-C”型拓撲,如圖2(a)所示。圖2(b)為對稱面上在彈體附近處的截面網格,為了對邊界層流動進行精確捕獲,需要對剛體壁面附近的網格進行加密。目前大量的研究均使用無量綱數y+來描述壁面網格的厚度,其定義為

圖2 計算域網格
(1)
式中:uf為近壁面摩擦速度,y為第一層網格的厚度,ν為流體的運動黏度。根據本文選擇的相關算法,需要保持y+≤1或30≤y+≤300,本文選取壁面網格高度2×10-6。
為了描述流體運動,配合本文采用的有限體積法,本文使用積分形式的納維-斯托克斯方程作為控制方程組。對于對流項等空間導數均采用二階迎風格式,根據前期的相關研究,更高階的離散格式對于本文研究內容并沒有明顯的影響。考慮到超音速流場中存在間斷的問題,本文采用Roe矢通量分裂格式構造網格面處的通量。對于湍流流動,本文選取雷諾平均方法,為了使方程組封閉,使用單方程的Spalart-Allmaras(S-A)湍流模型。本文使用了全隱式密度基求解器求解控制方程組,隱式方法允許采用更大的庫朗數,有利于加速迭代的收斂。
使用無反射壓力遠場作為來流邊界,馬赫數1.2,溫度300 K,靜壓101 325 Pa,彈體使用絕熱無滑移壁面條件。
1.2 網格密度的研究

表1 網格主要節點參數
使用上節中提到的算法,在零攻角、馬赫數1.2的工況下,分別利用3套網格計算得到流場。圖3所示為阻力系數對比圖,橫軸為計算域網格總數的立方根。從圖中看到3套網格得到的阻力系數差異不大,網格Ⅰ的阻力最小,網格Ⅱ的阻力最大,相對誤差約為4.24‰。
圖3 阻力系數對比圖
為了研究網格密度對于鴨舵渦系捕獲能力的影響,首先使用Q準則(見公式(2)),對流場中的渦旋進行辨識。根據Q準則,認為Q>0的區域為渦的核心區域。繪制Q=0的等值面圖,可以觀察到鴨舵尾渦的核心區域,如圖4所示。從圖中可以明顯地觀察到,舵片的翼尖渦自舵片附近產生,一直延伸到下游流場,在彈體表面也可以觀察到卷起的邊界層。

圖4 Q=0等值面圖
(2)
渦在流場中由于黏性的作用,渦量的強度會逐漸衰減,渦的動量耗散影響周圍的區域,其直徑會隨著流動變大。在數值計算的過程中,將物理空間離散化后會產生不可避免的數值誤差。經過數值試驗,越稀疏的網格,渦耗散的速度越快,下游流場的渦核直徑迅速變大;但是對于過于細密的網格,數值計算結果中的網格累積誤差會越來越大,同時消耗巨大的計算資源,因此本文用渦核直徑來量化網格質量。
由于彈尾的流動混亂使得翼尖渦不便觀察,本文選取距離彈底0.1 m處的截面渦核直徑進行研究。圖5所示為3種不同密度的網格在該截面處的渦核位置,左側圖為4個渦核的分布,右側圖為頂部的渦核,并統計該渦核的直徑。

圖5 距彈底0.1 m截面處彈體附近渦核
3種網格的頂部渦核里,網格單元數量分別為50,79和143,統計得到的渦核直徑d見圖6。網格Ⅱ的渦核直徑小于網格Ⅰ,但是更細密的網格Ⅲ的渦核直徑大于網格Ⅱ的,這印證了前文所提到的數值誤差。綜合考慮,選擇網格Ⅱ作為本文研究所采用的計算網格。
圖6 3套網格渦核直徑對比
2 流場定性分析
2.1 典型彈體流場分析
由于加裝修正組件,回轉體彈體受到修正組件的影響,尤其是斜置鴨舵產生的渦系的影響,本節將分析一種典型的雙旋彈彈體附近的流場,以零攻角且1.2馬赫數的工況下計算得到的流場結果為例。
首先研究彈體表面的壓力系數,壓力系數定義為
(3)

由于鴨舵渦系分為4個主要的渦,因此繪制4個方向彈體的壓力系數云圖,如圖7所示。
圖7 彈體表面壓力系數云圖
可以觀察到彈體上條帶狀的低壓區域,趨勢線在圖中用虛線繪制出。圖中的帶狀區域分布位置與鴨舵渦系掃過彈體的區域基本一致。定量對比彈體的受力情況,彈體軸向力增大了1%,與此同時,由于渦系的非對稱分布,彈體也出現了側向力,將在第3節討論。
2.2 彈體旋轉運動對流場的影響
作為旋轉穩定彈,該彈在飛行過程中彈體高速旋轉,帶動周圍氣流轉動,鴨舵產生的渦系受到其影響。分別繪制零攻角且1.2馬赫數下,距離彈底0.1 m處截面上的渦核以及流線圖(彈頭視角),如圖8所示。彈體的轉動角速度ω分別為0,100 s-1,200 s-1和300 s-1。

圖8 零攻角下距彈體0.1 m截面處彈體附近渦核及流線圖
從圖8中可以觀察到,隨著彈體轉速的增大,鴨舵渦系發生了偏轉。該截面上渦核的位置出現了逆時針方向的移動(與彈體轉動同向),且彈體轉速越高,這種現象越明顯,偏轉的角度越大。值得注意的是,由于彈體的旋轉與右側舵片尾渦的方向相同,在右側出現了一個誘導產生的渦,其產生機理如圖9所示。其余3個舵片的尾渦方向與彈體相反,因此未出現這種情況。
圖9 誘導渦產生機理
2.3 彈體攻角對流場的影響
當出現攻角時,彈體除了受到軸向來流的影響,還受到橫向氣流的作用。繼續以距離彈底0.1 m處的截面為例,首先對比彈體零轉速的情況,8°攻角的渦核及流線圖,如圖10所示。與零攻角的情況不同,8°攻角的鴨舵尾渦主要集中在背風側,迎風側的渦過于靠近彈體的附面層,在后者的作用下,渦更快地耗散掉了。在背風側的渦系可以觀察到3個主要的鴨舵產生的渦以及一系列誘導產生的次級渦。即使在彈體沒有旋轉的情況下,流場也呈現出非對稱特性。
圖10 8°攻角下距彈體0.1 m截面處彈體附近渦核及流線圖
在8°攻角的情況下,彈體出現轉動時,鴨舵產生的3個渦依舊分布在背風側,隨著彈體轉速的提高,左側的渦更靠近彈體,右側的渦遠離彈體。最靠近彈體的誘導渦向彈體旋轉方向發生了更明顯的扭轉。
3 彈體受力分析
3.1 零攻角彈體受力
在零攻角的情況下,彈體的法向力系數Cy和側向力系數Cz隨彈體轉速的變化如圖11所示。
圖11 零攻角下彈體法向力系數及側向力系數隨彈體轉速變化曲線
隨著彈體轉速增大,法向力系數和側向力系數的幅值也逐漸變大。彈體受到的垂直于彈軸的合力系數幅值變化如圖12所示,彈體轉速越高,彈體受到的垂直于彈軸的合力越大。
圖12 彈體法向合力系數隨彈體轉速的變化
為了確定彈體側向力和法向力出現差異的原因,繪制彈體轉速為0和300 s-1條件下,距彈底0.1 m處截面上的壓力系數Cp,如圖13所示(彈頭視角)。
圖13 零攻角下彈體截面壓力系數Cp(彈頭視角)
彈體靜止時,彈體表面存在4個低壓區域,位置與鴨舵渦系掃過彈體的部分重合。當彈體以300 s-1轉動時,低壓區域向彈體旋轉方向發生了偏轉。同時,3個低壓區的壓力系數明顯減小,1個低壓區的壓力系數上升,這與渦的旋轉方向和彈體旋轉方向有關,示意圖見圖14(彈頭視角)。
圖14 渦系與彈體旋轉方向示意圖
圖14中1號、2號、3號渦的影響受到彈體旋轉而加強,4號渦的影響受到彈體旋轉而減弱,彈體表面壓力分布的非對稱性明顯加強,這解釋了零攻角時彈體旋轉導致彈體側向力變大的原因。
3.2 多攻角彈體受力
對比攻角分別為0,4°,8°時的彈體法向力系數和側向力系數,如圖15所示。
彈體法向力系數見圖15(a),其幅度隨彈體轉速的提高而增大,且呈現非線性,轉速越高,法向力增大得越快。當攻角增大時,彈體法向力系數明顯增大,且受彈體轉動影響越大。
彈體側向力系數見圖15(b),彈體的馬格努斯效應十分明顯,與彈體的轉速和攻角均成正相關。與傳統回轉體彈丸不同的是彈體轉速為0時的側向力系數不為0,且與攻角相關。
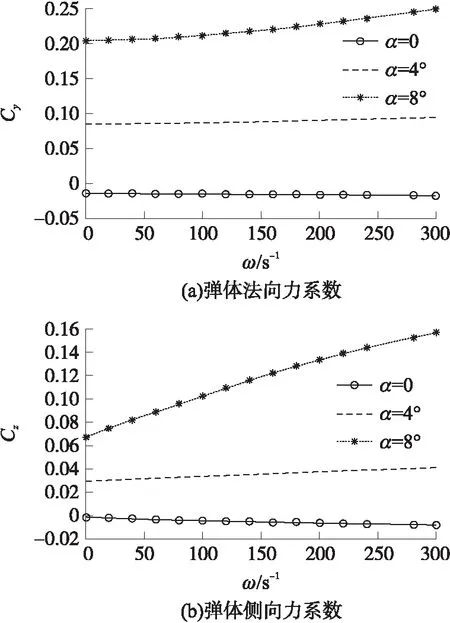
圖15 不同攻角下彈體法向力系數及側向力系數隨彈體轉速變化曲線
與前節相同,對比8°攻角下,彈體轉速為0和300 s-1條件下,距彈底0.1 m處彈體截面上的壓力系數,如圖16所示(彈頭視角)。

圖16 8°攻角下彈體截面壓力系數Cp(彈頭視角)
彈體在靜止時,彈體壓力系數的非對稱主要由于背風側的渦系影響所致,彈體轉動后,非對稱壓力分布更加明顯,這與彈體側向力隨轉速增大的現象吻合。
4 結束語
本文利用計算流體力學方法對某雙旋修正火箭彈的外流場進行了數值計算,重點研究了鴨舵的存在對于彈體受力的影響。首先,討論了網格密度對于數值計算的影響,尤其是對于鴨舵尾渦辨識的影響。選擇合適密度的計算域網格,對1.2馬赫數多攻角多轉速工況的雙旋彈流場進行了計算。得到如下結論:
①鴨舵渦系會使彈體上出現條帶狀低壓區域,不對稱的渦系使彈體受力不再對稱;
②鴨舵渦系會由于彈體的轉動而發生扭轉,其扭轉方向與彈體轉動方向一致,因此,彈體的法向力和側向力均受到影響;
③鴨舵渦系與彈體旋轉共同作用下,誘導產生次級渦。
④存在攻角時彈體的側向力仍然表現出明顯的馬格努斯效應。與傳統回轉體彈丸不同的是彈體轉速為0時的側向力系數不為0,且與攻角相關。
高旋彈的飛行穩定性與其馬格努斯力矩息息相關,雙旋結構的彈丸側向力和偏航力矩同時受到彈體轉動和鴨舵渦系的影響,這種非線性耦合關系的研究對于外彈道穩定性分析和修正組件設計有重要意義。
未來的工作將著重于組件的不同角度、不同轉速對彈體乃至全彈氣動力的影響,完成相關的模型建立。