基于模糊邏輯的斷路器狀態檢測
2021-07-05 02:29:02周秀樺
電氣開關 2021年5期
關鍵詞:故障
周秀樺
(廣西電網有限責任公司欽州供電局,廣西 欽州 535000)
1 引言
現階段基于人工智能的電氣設備故障診斷方式已經有了較為深入的研究,已經成熟地應用在了電力斷路器技術狀態診斷等領域。在人工智能領域,通常采用模糊邏輯、神經網絡、專家系統等方式,對一些具有高度不確定性的系統進行控制、命令和診斷,因此越來越多受到關注[1]。其中模糊邏輯是一種處理不確定性和模糊信息等復雜問題的方法,在控制系統、信息處理、機器人操控、能源等領域有著廣泛的應用。在電氣檢測領域方面,廣泛應用于高壓斷路器的監測與診斷。
高壓斷路器是確保電力系統高效安全運行的最重要設備之一,而且斷路器的采購和維護的成本較高。因此利用模糊邏輯通過分析斷路器收集到的數據,以檢測故障的狀態量,并且判斷出故障類型[2-3]。
本文介紹了一種模糊診斷方法在斷路器故障診斷中的應用,該模糊邏輯系統的目標是通過獲取的參數來識別高壓斷路器的故障,并且通過分析診斷出故障類型。
2 模糊理論
當系統的輸入量和輸出量之間的關系無法通過數學方式精確描述時,可以考慮采用模糊邏輯。基本思想利用模糊值代替精確值,由隸屬度函數[3]表示。文獻[4]采用基于變分模態分解VDM模糊熵的方法,并利用SVM分類器來識別斷路器的故障類型。引入概念離群集是將隸屬度概念推廣到集合中的二進制元素。模糊集是一個與特征函數相關聯的子集,該特征函數的取值區間為[0,1],這個取值區間包含了一個元素在該子集中的隸屬度[5]。將X視為定義域,定義域X的模糊集A由一個隸屬函數μA(x)表示,該函數將每個元素X與集合A的隸屬度聯系在一起,根據如下關系:
μA(x):X→[0,1](1)
X定義域中的模糊集合A表示為:
A={x,μA(x)},x∈X(2)
模糊集可以表示為其整體元素的有序對和隸屬度函數的等級的集合。形式(x,μA(x))的一個有序對被稱為一個模糊單例,因此整個模糊集A可以被視為所有組成的模糊單例的集合。
下面定義了模糊邏輯中使用的特征術語:
●變量x代表被分析對象的一個屬性;
●模糊集A被稱為關聯模糊集。
●定義域X為模糊集的經典集合;
●隸屬函數μA(x)根據式(1)將模糊集A的隸屬度與各元素相關聯;
●隸屬度μA(x)是指元素屬于模糊集,μA(x)∈[0,1]。
構建模糊集主要取決于建立一個隸屬度函數。隸屬函數是集合中指示函數的一般化。隸屬函數可以人為主觀設定,選擇不同的隸屬函數來表達相同的概念。
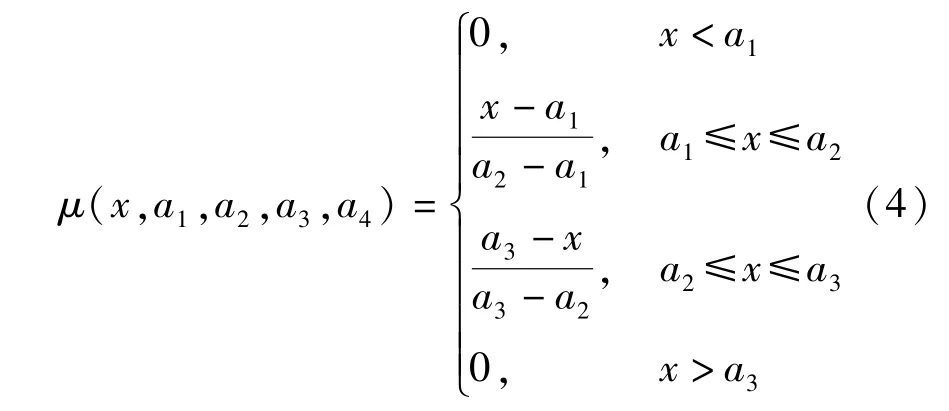
最常用的隸屬函數如圖1所示的梯形和三角形隸屬函數,對稱梯形函數由式(3)定義,對稱三角函數由式(4)定義。

圖1 隸屬度函數類型
其表達式為[4]:

其中μ(x)為隸屬度等級,x為分析量,a1,a2,a3,a4為分析量值。
任何使用模糊邏輯的應用程序的開發都需要經歷模糊化、模糊推理、去模糊化的步驟。模糊化是指輸入量與根據特定標準選擇的隸屬度函數相關聯,并基于它們定義適當的輸入量的參考值,利用響應的隸屬度函數變換結果,整合成為機器可識別的語言,構建出模糊子集合。模糊推理是根據現有知識庫中的模糊規律,將模糊化處理后的輸入信號進行推理計算,輸出一個機器語言量表示的輸出信號。解模糊化是模糊控制的最后一步,是將模糊推理出的模糊量輸出信號轉化為精確量,并應用到輸出變量的特定域返回的結果。
3 斷路器模糊邏輯診斷
斷路器模糊診斷邏輯系統的結構如圖2所示,由參考輸入、模糊化、知識庫、模糊推理、解模糊化和輸出組成[6]。為了實現對電氣設備技術狀態的診斷,需要對其參數進行實時監測。因此,模糊系統的參考輸入是通過監測裝置獲得的數值。其中包括移動觸點的行程和速度,打開和關閉操作通過螺線管線圈的電流和操作電壓,以及打開和關閉線圈螺線管電流的剖面面積。

圖2 模糊邏輯診斷系統
知識庫是根據人的操作經驗所構建的,其本身代表了一種算法機制,能夠預測輸入參數演化的結果。模糊化是給每個輸入變量設定隸屬度函數,并應用到檢測技術中。在執行模糊化之后,定義并構建了控制分析過程的規程。知識庫是通過記錄斷路器上發生的一系列故障并通過檢測得出的一系列參數。采用基于模糊系統的知識庫對斷路器進行診斷,利用模糊邏輯斷路器監控與診斷軟件的設置,可以推導出斷路器的技術條件。
斷路器的常見故障如下:
●控制和輔助電路中的電氣故障;
●彈簧儲能機構發生機械故障;
●傳感器發生故障。
控制斷路器模糊診斷系統通常使用IF/THEN規則,如下:
(1)IF觸點移動行程、觸點移動速度、平均操作電壓、通過線圈的電流正常時,THEN斷路器狀態正常;
(2)IF觸點車的行程和速度正常,平均工作電壓低,通過電磁線圈的電流低,通過電磁線圈的電流面積正常時,THEN斷路器技術狀態異常,輔助回路電壓低;
(3)IF觸點移動行程和觸點移動速度正常,平均工作電壓高,通過電磁線圈的電流高,THEN斷路器狀態異常,輔助回路電壓高;
(4)IF觸頭行程和觸頭速度正常,平均操作電壓高,通過電磁線圈的電流正常,通過電磁線圈的電流剖面面積大,THEN斷路器技術條件異常,電磁閥氣隙自由行程大;
(5)IF觸點移動行程和速度正常,平均操作電壓高,通過電磁線圈的電流正常,THEN斷路器狀態異常,電磁氣隙自由行程小;
(6)IF觸點移動行程大,移動速度低,平均操作電壓正常,通過電磁線圈的電流正常,THEN斷路器技術狀態異常,傳感器故障;
(7)IF觸點移動行程正常,觸點移動速度低,平均操作電壓正常,通過電磁線圈的電流正常,THEN斷路器技術狀態異常,能量積累低;
(8)IF接觸器的行程正常,移動速度高,平均工作電壓正常,通過電磁線圈的電流正常,THEN環線斷路器技術條件異常,積累能量高。
模糊化的目的是從一些標量的模糊信息中獲取與輸出變量相關的信息,并以模糊集的形式顯示。通過從模糊值可以得出輸出結果。最常用的解模糊化方法是中位數法,研究模糊理論的其他方法有最大隸屬度法和加權平均法(重心法)。表1給出了一個或多個監測參數不同而導致的斷路器的不同故障狀況。并在表1中給出了可能的故障原因和故障點。模糊診斷通過對斷路器的狀態進行分析,得出合適的控制規則,并在斷路器處于異常狀態時產生預警提示。
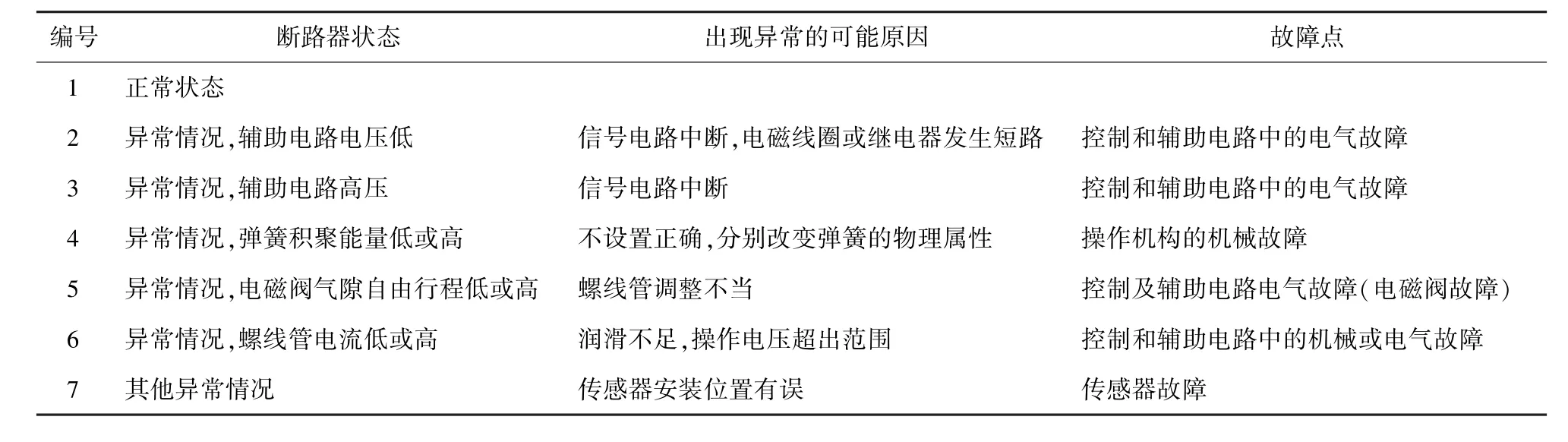
表1 斷路器狀態
4 高壓斷路器模糊PID控制器設計
高壓斷路器可以通過對電網參數的采集和分析,對斷路器自身狀態的檢測和判斷,根據預先設定的程序動作,并通過需要來調節斷路器機械結構的動作參數,從而計算出合適的斷路器分合閘速度和動作時間。斷路器的控制原理圖如圖3所示。

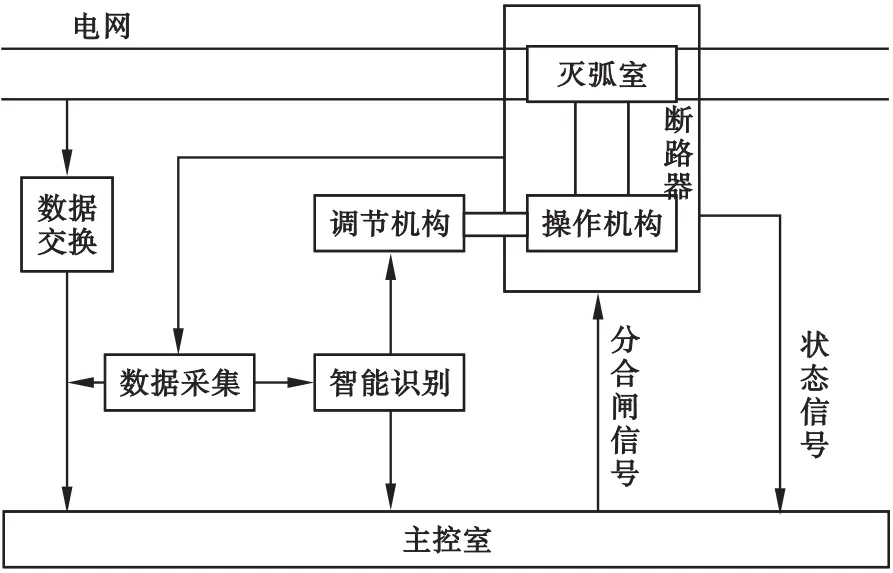
圖3 高壓斷路器控制系統圖
高壓斷路器的PID調節器的離散表示方式為:
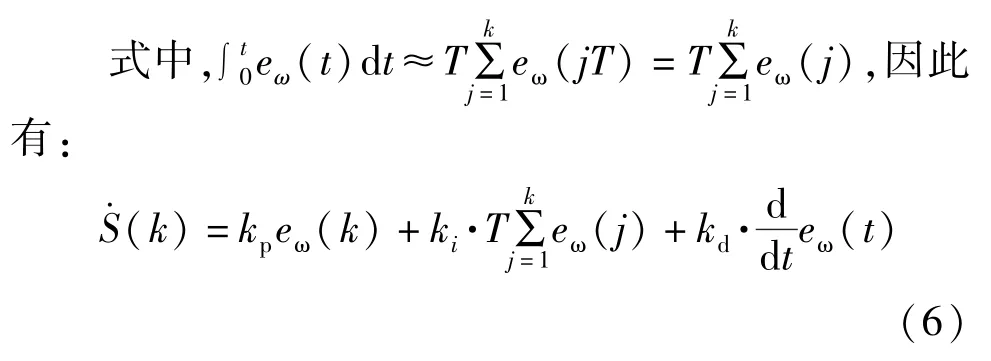
控制參數kp能夠提高系統的響應速度,增加調節精度,ki能夠消除調節時產生的誤差,kd能夠減小控制的動作幅度,提高穩定性。因此可以通過調節kp和ki的值,得到想要的檢測效果。
對于模糊PID控制器自調節的計算公式為:
因此,將基于模糊理論的高壓斷路器設計為一個2輸入2輸出的系統,如圖4所示。

圖4 2輸入2輸出模糊控制器
在高壓斷路器中,eω(k)為位移誤差,Δeω(k)為位移誤差的變化量,其表達式為:

在實際應用中,將位移誤差eω(k)的輸入轉化為隸屬度函數區間,通過量化因子將區間規劃為[0,1],其隸屬度函數如圖5所示。其模糊子集趨于零的速度越快,其靈敏度和控制效果越好。

圖5 eω隸屬度函數
Δeω(k)的隸屬度函數如圖6所示。

圖6 Δeω隸屬度函數
對于不同的位移誤差和位移誤差變化率,參數自調整一般采用以下規則:
(1)位移誤差較大時,為了提高系統的響應速度,kp和kd的取值應該較大,為了防止響應產生較大的超調量,ki應該取較小的值;
(2)位移誤差為中大時,為了減小系統的超調量,kp的取值應該較小,同時為了保證合理的響應速度,ki和kd的值應該選取適中;
(3)位移誤差較小時,為提高使系統的穩態性能,應取適中的kp和較大的ki和kd。
經過對高壓斷路器多次調整,最終確定當kp=0.8,ki=0.2,kd=0.3 時檢測系統最為穩定。
5 結論
對于斷路器的監測和診斷系統,最基本的技術問題是分析所測得的數據,模糊邏輯通過分析監測系統獲得的數據來診斷斷路器的狀態,實現了對斷路器重要診斷參數的監控,并通過一套控制模糊系統的規則分別對斷路器的異常狀態進行檢測和識別。本文介紹了模糊邏輯的數學模型,通過在斷路器診斷中采用模糊邏輯,設計了高壓斷路器的模糊PID控制器,最后得出合理的控制參數,實現了對斷路器的控制和診斷。利用基于模糊邏輯的斷路器監控裝置和診斷系統,能夠有效地提高設備可靠性、降低故障率、降低壽命成本、延長設備使用壽命、提高設備性能、提高設備利用率等效益。
猜你喜歡
汽車維修與保養(2019年7期)2020-01-06 03:30:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鐵道通信信號(2016年4期)2016-06-01 12:10:19
電測與儀表(2016年5期)2016-04-22 01:13:50
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年8期)2015-04-17 03:32:52
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年7期)2015-04-17 02:12:40
汽車維修與保養(2015年2期)2015-04-17 01:30:34
汽車維護與修理(2015年2期)2015-02-28 12:15:39
