基于自適應(yīng)雙閾值的車窗三維點(diǎn)云修復(fù)算法
2021-07-06 02:10:34馬榮貴
計(jì)算機(jī)技術(shù)與發(fā)展 2021年6期
關(guān)鍵詞:特征
譚 珂,馬榮貴,駱 磊
(長(zhǎng)安大學(xué) 信息工程學(xué)院,陜西 西安 710061)
0 引 言
車輛檢測(cè)是智能交通系統(tǒng)中一個(gè)不可或缺的重要環(huán)節(jié),能夠?yàn)榈缆方煌刂啤⒏咚俟饭芾砗途o急事件管理等諸多后續(xù)交通環(huán)節(jié)提供強(qiáng)有力的信息支撐[1]。目前車輛輪廓檢測(cè)獲取手段主要分為兩類:一種是通過圖片、視頻信息,利用多種神經(jīng)網(wǎng)絡(luò)進(jìn)行訓(xùn)練,獲取車輛輪廓信息[1-2];另一種是借助激光掃描技術(shù),快速獲取復(fù)雜曲面的點(diǎn)云模型[3-6]。 當(dāng)車輛低速通過龍門架,由安裝在龍門架兩端的測(cè)距雷達(dá)掃描車輛,獲取三維點(diǎn)云數(shù)據(jù)。由于兩端測(cè)距雷達(dá)水平方向距離車輛較近,并且高度較高,導(dǎo)致激光對(duì)車窗掃描時(shí)的入射角過大,又因車窗材質(zhì)特殊,激光測(cè)量點(diǎn)嚴(yán)重偏離反射面,在車窗處產(chǎn)生特殊噪聲點(diǎn)。針對(duì)這類特殊噪聲點(diǎn),該文提出一種改進(jìn)的車窗三維點(diǎn)云數(shù)據(jù)修復(fù)算法。
對(duì)車窗處的點(diǎn)云數(shù)據(jù)重建有兩方面工作,一是去除特殊噪聲點(diǎn),二是點(diǎn)云孔洞修復(fù)。在去除特殊噪聲點(diǎn)方面,文獻(xiàn)[7]中針對(duì)散亂點(diǎn)云特征提取過程中效率低和噪聲敏感性差的問題,采用主成分分析法和局部二次曲面擬合法對(duì)點(diǎn)云模型進(jìn)行微分幾何信息估算,并利用雙閾值檢測(cè)方法對(duì)散亂點(diǎn)云的特征信息進(jìn)行提取。文獻(xiàn)[8]采用支持向量機(jī)做二維數(shù)據(jù)的回歸分析,獲得殘缺點(diǎn)的坐標(biāo)參數(shù),從而完成空洞修補(bǔ),但是此方法會(huì)提取除車窗外的其他處特征點(diǎn)。文獻(xiàn)[9]提出了一種改進(jìn)的八鄰域深度差算法進(jìn)行邊界提取,但在面對(duì)車輛切片柵格數(shù)據(jù)中車窗部位邊界的拐角,即噪聲點(diǎn)和正常數(shù)據(jù)點(diǎn)同時(shí)處于一個(gè)八鄰域檢測(cè)框時(shí),該框的深度值難以合理確定,容易造成噪聲消去不足或者將正常點(diǎn)云誤判為噪聲。
在點(diǎn)云空洞修復(fù)方面,文獻(xiàn)[10]提出了一種基于徑向基函數(shù)的復(fù)雜曲面的孔洞修補(bǔ)算法,能恢復(fù)原有模型的基本幾何特征;文獻(xiàn)[11]提出一種基于經(jīng)緯網(wǎng)格的點(diǎn)云修補(bǔ)算法,利用樣條插值進(jìn)行孔洞填補(bǔ),但是對(duì)目標(biāo)物體表面的紋理有一定要求;文獻(xiàn)[12]提出一種基于SFM的三維點(diǎn)云孔洞修補(bǔ)算法,利用光柵投影法中得到的二維相位信息來提取三維點(diǎn)云孔洞區(qū)域的邊界點(diǎn),從而完成對(duì)點(diǎn)云孔洞的填補(bǔ),但是SFM數(shù)據(jù)集的獲取并非易事。
針對(duì)邊緣提取算法對(duì)車窗邊界不敏感,容易造成修復(fù)后的車輛數(shù)據(jù)和真實(shí)數(shù)據(jù)不匹配的問題,該文對(duì)其進(jìn)行了改進(jìn),以點(diǎn)云間距與曲率作為雙閾值進(jìn)行噪聲特征點(diǎn)提取,利用標(biāo)準(zhǔn)差確定閾值,通過閾值確定車窗處噪聲的邊界特征點(diǎn)并完成去噪,再使用徑向基函數(shù)對(duì)去噪后的車窗部分的點(diǎn)云數(shù)據(jù)進(jìn)行修復(fù)。
1 基于點(diǎn)云間距與點(diǎn)云曲率的特征提取算法
1.1 點(diǎn)云間距與點(diǎn)云曲率
考慮到點(diǎn)云處理時(shí),車窗處的噪聲形狀不定,受車輛駛?cè)虢嵌龋皇欠裼腥说惹闆r影響,對(duì)三維車輛點(diǎn)云數(shù)據(jù)噪聲特征提取意義不大,該文對(duì)車輛點(diǎn)云數(shù)據(jù)進(jìn)行切片,對(duì)每一個(gè)切片進(jìn)行分析,提取車窗噪聲特征點(diǎn)。
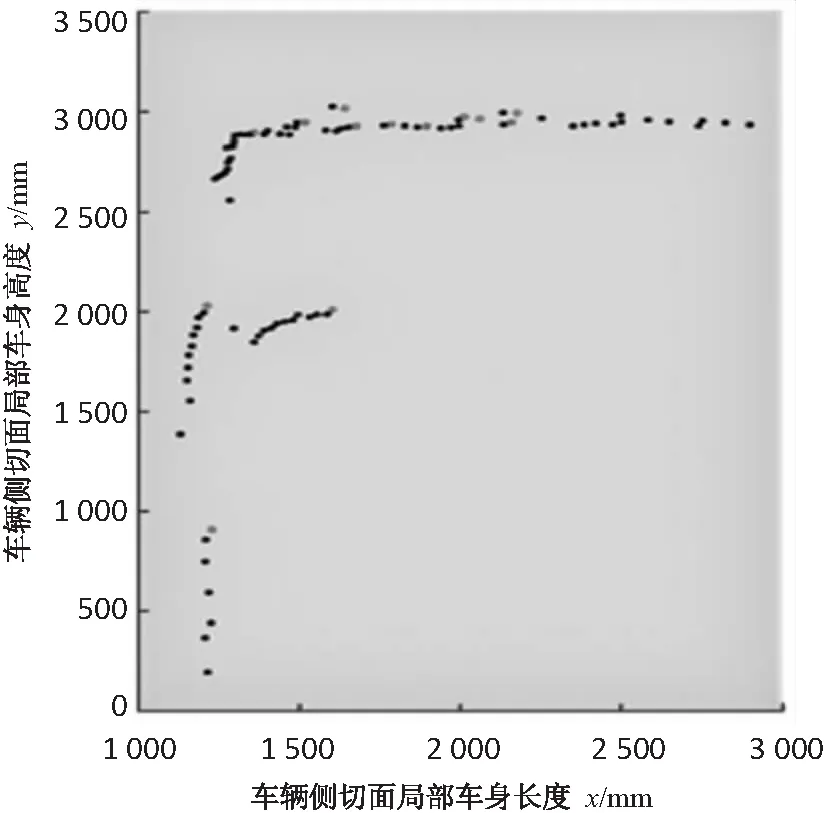
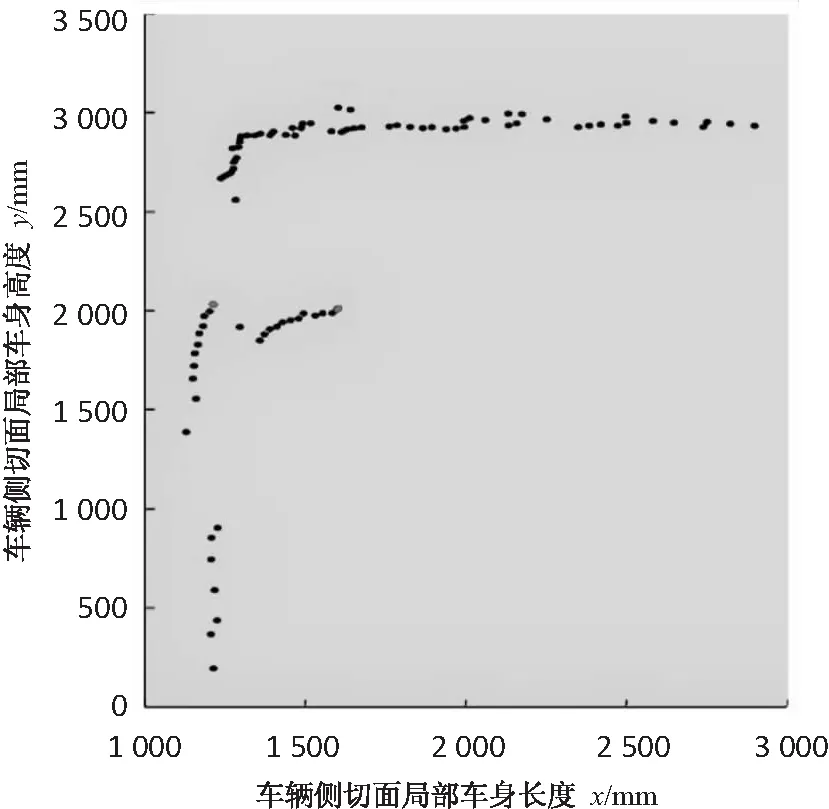
點(diǎn)云間距在車輛點(diǎn)云數(shù)據(jù)中是一個(gè)重要的屬性,通常點(diǎn)云間距過大處,可以表示為孔洞或者非連接處,在文中車輛點(diǎn)云數(shù)據(jù)中,點(diǎn)云間距是車窗處噪聲點(diǎn)的一個(gè)很明顯的特征。圖1為一輛面包車右車身處的掃描點(diǎn)切面,可以看出矩形框圈出的是原本應(yīng)該在車窗處的點(diǎn)云,受車窗材質(zhì)影響,點(diǎn)云數(shù)據(jù)偏移,成為了異常噪聲點(diǎn),而車窗部分因此缺失點(diǎn)云數(shù)據(jù),產(chǎn)生孔洞。
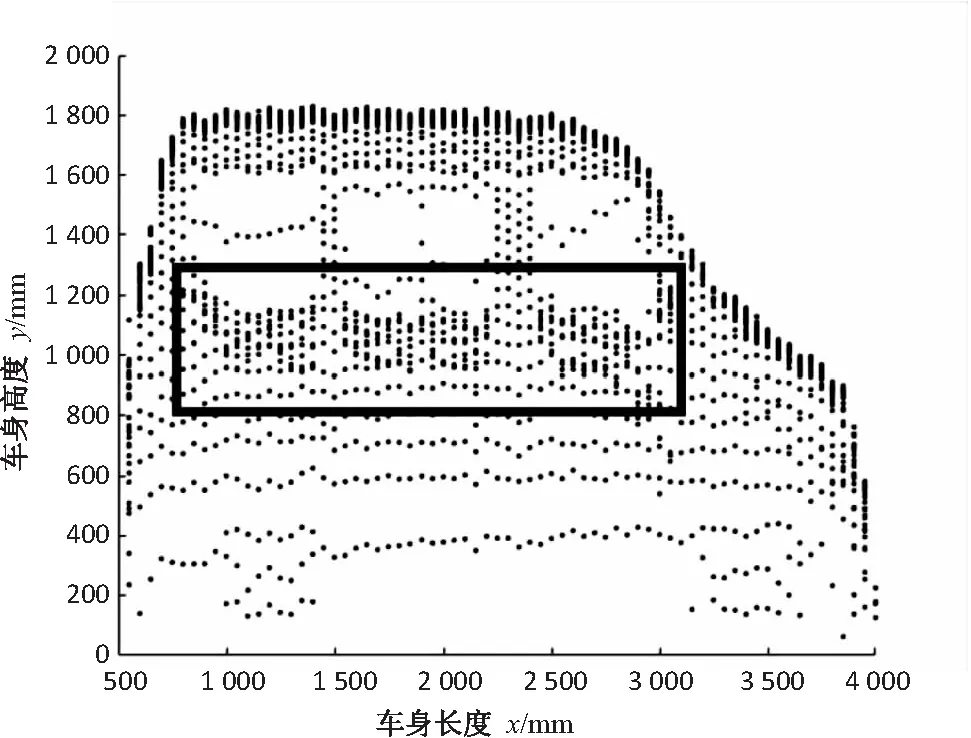
圖1 小面包車身右側(cè)面掃面切面
點(diǎn)間距通常用歐氏距離表示,一個(gè)切面上的p,q兩點(diǎn)間的歐氏距離計(jì)算方式如式(1)所示:
(1)
因?yàn)檐嚧斑吔缭肼朁c(diǎn)的間距大小不一,單純使用間距表示特征效果較差。通過對(duì)間距進(jìn)行微分,利用間距的變化程度,作為是否出現(xiàn)噪聲點(diǎn)的判斷依據(jù)效果良好。如圖2所示,圖中是車輛車頂輪廓局部的一處點(diǎn)云,單位為mm,橫坐標(biāo)表示車輛的車身長(zhǎng)度,縱坐標(biāo)表示車輛的車身高度。
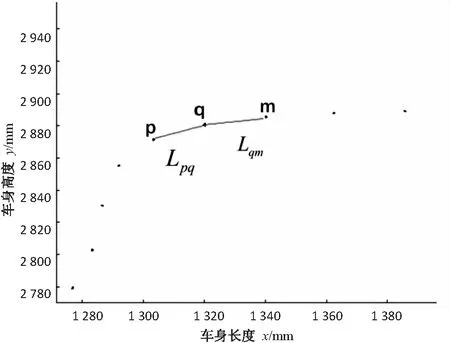
圖2 點(diǎn)間距說明示意圖
有p、q、m三個(gè)點(diǎn),它們間距的變化量計(jì)算方式如式(2)所示:
(2)
其中,dLq為點(diǎn)q處的間距變化量,Lpq為相鄰兩點(diǎn)p、q的間距,Lqm為相鄰兩點(diǎn)q、m的間距。
點(diǎn)云數(shù)據(jù)中曲率可以客觀地表示出該點(diǎn)處的模型特征情況,局部一點(diǎn)的曲率越小,表明該點(diǎn)處的模型越平緩,局部一點(diǎn)的曲率越大,則表明該點(diǎn)處的模型越尖銳。計(jì)算近鄰點(diǎn)所對(duì)應(yīng)的曲率變化,與設(shè)定的閾值對(duì)比,則可以有效提取出特征點(diǎn)。
離散點(diǎn)的曲率計(jì)算公式如式(3)所示:
(3)
其中,K表示曲率,y表示一個(gè)切面的數(shù)據(jù)點(diǎn)的縱坐標(biāo),則第i點(diǎn)處的y的一階導(dǎo)數(shù)的計(jì)算公式為:
(4)
同理,第i點(diǎn)處的y的二階導(dǎo)數(shù)計(jì)算公式如式(5)所示:
(5)
1.2 基于標(biāo)準(zhǔn)差的自適應(yīng)雙閾值去噪算法
在車輛點(diǎn)云數(shù)據(jù)中,無論是曲率還是間距,車窗處的噪聲點(diǎn)都應(yīng)該相較于正常點(diǎn)來說,遠(yuǎn)偏于數(shù)據(jù)集,標(biāo)準(zhǔn)差可以很好地反映數(shù)據(jù)的離散程度。噪聲點(diǎn)的標(biāo)準(zhǔn)差與均值的和必定小于最大值,因此以標(biāo)準(zhǔn)差與均值的和作為閾值,可以提取出遠(yuǎn)偏于實(shí)際數(shù)據(jù)的那部分。應(yīng)用標(biāo)準(zhǔn)差與均值的和作為閾值,會(huì)將非車窗噪聲特征點(diǎn)進(jìn)行提取,但因?yàn)橛呻p閾值共同確定噪聲邊界特征點(diǎn),所以幾乎不會(huì)影響提取的準(zhǔn)確度。
點(diǎn)間距變化量的標(biāo)準(zhǔn)差的計(jì)算方式如式(6)所示:
(6)
其中,N為一個(gè)切面內(nèi)的點(diǎn)云數(shù)據(jù)個(gè)數(shù)。
曲率的標(biāo)準(zhǔn)差的計(jì)算方式如式(7)所示:
(7)

計(jì)算當(dāng)前切面的閾值,與每一個(gè)點(diǎn)處的間距變化量和曲率進(jìn)行比較,當(dāng)該點(diǎn)同時(shí)大于兩個(gè)閾值,則可以確定該點(diǎn)為車窗噪聲邊界特征點(diǎn)。
單閾值曲率提取噪聲特征點(diǎn)與雙閾值提取車窗噪聲特征點(diǎn)的對(duì)比如圖3所示,取車頭的一處車窗切面為例。橫縱坐標(biāo)單位都是mm,縱坐標(biāo)是車頭的高度,橫坐標(biāo)是車身的側(cè)切面即車輛的長(zhǎng)度,圖中標(biāo)灰的點(diǎn)云是算法確定的車窗噪聲邊界特征點(diǎn)。
(a)單一閾值曲率確定噪聲特征點(diǎn)
(b)雙閾值確定噪聲特征點(diǎn)
可以看出,圖3(a)是將曲率作為唯一閾值進(jìn)行判斷,圖中車身橫向邊緣上的很多灰色點(diǎn)云是被誤判為噪聲點(diǎn)的正常數(shù)據(jù),而圖3(b)是采用曲率和點(diǎn)間距雙閾值進(jìn)行判斷后的特征點(diǎn)確定結(jié)果,由于考慮到點(diǎn)間距變化量閾值的限制,既標(biāo)定了車窗處的噪聲特征點(diǎn),又避免了單閾值誤判正常數(shù)據(jù)的情況,因此該文提出的雙閾值算法可以很好地對(duì)車窗噪聲邊界特征點(diǎn)進(jìn)行識(shí)別。
2 基于徑向基函數(shù)的孔洞修復(fù)
2.1 車窗邊界擬合
在采用雙閾值去噪方法后,可以大致確定車窗噪聲點(diǎn)邊界。如圖4(a)所示,車窗處灰色較淺的點(diǎn)是特征提取算法識(shí)別出的車窗噪聲邊界點(diǎn)。
圖4(b)是根據(jù)識(shí)別的噪聲特征點(diǎn),使用了最小二乘法進(jìn)行了初步線性擬合后的結(jié)果,將分離的車窗噪聲特征點(diǎn)初步擬合成了閉合曲線。
(a)車窗邊界特征點(diǎn)確定圖

(b)車窗邊界初步擬合結(jié)果圖
對(duì)每一個(gè)切面使用擬合即可構(gòu)成車窗,但是這種做法沒有考慮車窗的整體信息,只考慮了一個(gè)切面的車窗信息,受車窗邊界點(diǎn)的影響較大,重新構(gòu)建的車窗曲面會(huì)因?yàn)楦鱾€(gè)切面直接彼此分離,呈凹凸不平感。因此需要從車窗整體數(shù)據(jù)考慮,進(jìn)行車窗重建。
2.2 基于徑向基函數(shù)的插值修復(fù)
徑向基函數(shù)(radial basis function,RBF)是一種確定性的多維空間插值模型,可以有效逼近任意維度的空間數(shù)據(jù)[12]。RBF插值模型的插值精度受基函數(shù)形態(tài)參數(shù)的影響,如何快速獲取較優(yōu)的形態(tài)參數(shù),研究者們提出了不同的方法[13-17]。
在三維空間R3中,有點(diǎn)云集合P={p1,p2,…,pn},其分別對(duì)應(yīng)約束值為{h1,h2,…,hn}。RBF方法要求擬合的目標(biāo)曲面必須通過每一個(gè)測(cè)得的采樣值,故如果能構(gòu)造函數(shù)f(x),使得每個(gè)點(diǎn)均滿足條件F(pi)=hi,那么一個(gè)隱式曲面就可以用方程F(qi)=0來表示。該文以確定的噪聲孔洞邊界點(diǎn)及其初步擬合邊界為基礎(chǔ),建立基于徑向基函數(shù)的隱式曲面。
根據(jù)點(diǎn)云集合和約束條件,構(gòu)建基于徑向基函數(shù)的隱式曲面,曲面表示如式(8)所示:

(8)
其中,r為構(gòu)建曲面時(shí)通過的任意散亂點(diǎn)云,qj為建立曲面所需的采樣點(diǎn),ωj為對(duì)應(yīng)每個(gè)采樣點(diǎn)qj的權(quán)值,φ(r-qj)為徑向基函數(shù)。
P(r)=c0+c1r=p0+p1x+p2y+p3z
(9)
徑向基函數(shù)的插值函數(shù)表達(dá)式為:
(10)
在對(duì)空間散亂點(diǎn)進(jìn)行插值時(shí),根據(jù)文中需求,選擇立方體曲面函數(shù)作為基函數(shù),對(duì)于三維空間中的任意兩個(gè)散亂點(diǎn),其基函數(shù)表達(dá)式如式(11)所示:
φ(qi-qj)=|qi-qj|3=
(11)
根據(jù)約束點(diǎn)和約束條件確定了曲面的隱式方程,如式(12):
(12)
曲面方程確定后,需要對(duì)車窗處的去噪后的點(diǎn)云孔洞進(jìn)行修復(fù)。該文選擇梯度下降法計(jì)算車窗處需要填充的點(diǎn)云坐標(biāo)。梯度下降法的計(jì)算過程就是沿梯度下降的方向求解極小值,它可以最快地向曲面迭代逼近。當(dāng)滿足迭代需求或梯度下降變化為0時(shí),迭代停止,即完成對(duì)孔洞部分的填充修補(bǔ)。
3 實(shí)驗(yàn)結(jié)果分析
3.1 實(shí)驗(yàn)結(jié)果
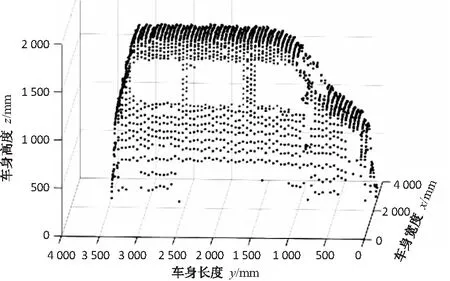
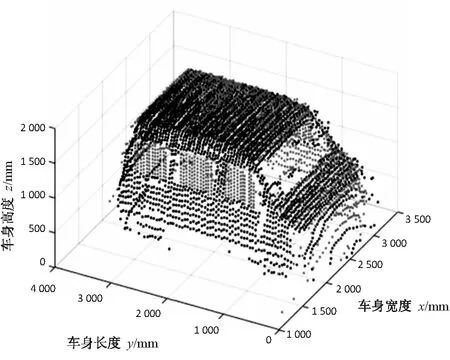
編程實(shí)現(xiàn)提出的雙閾值去噪算法對(duì)原始車輛點(diǎn)云數(shù)據(jù)進(jìn)行去噪,對(duì)收集到的車輛數(shù)據(jù)進(jìn)行實(shí)驗(yàn)驗(yàn)證。車輛修復(fù)重建的效果如圖5所示,圖中黑色部分表示車輛的數(shù)據(jù)點(diǎn),灰色部分表示重建后車窗的數(shù)據(jù)點(diǎn),其所在坐標(biāo)系的單位均為mm。

(a)車輛原始點(diǎn)云
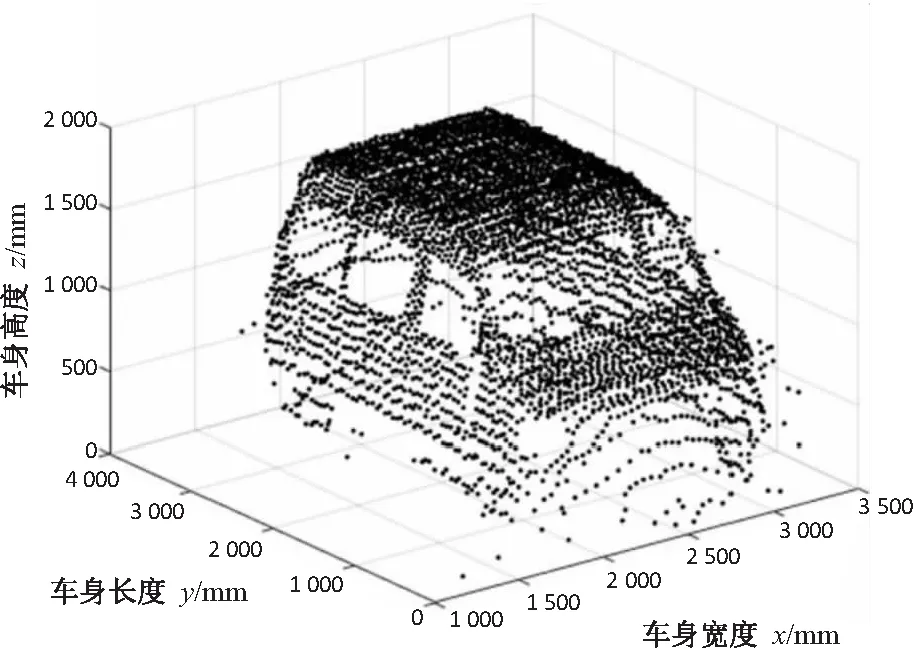
(b)車輛去噪點(diǎn)云
(c)車窗修復(fù)后
圖5(a)是激光雷達(dá)獲取的車輛的原始三維點(diǎn)維數(shù)據(jù)圖,圖5(b)是對(duì)面包車數(shù)據(jù)進(jìn)行了雙閾值去噪并標(biāo)記出了車窗部分,等待對(duì)車窗部分的修復(fù)重建。圖5(c)中,面包車側(cè)面的三個(gè)車窗部分,已經(jīng)沒有特殊噪聲點(diǎn),且整體點(diǎn)云沒有孔洞,達(dá)到車窗重建的目的。
3.2 對(duì)比結(jié)果
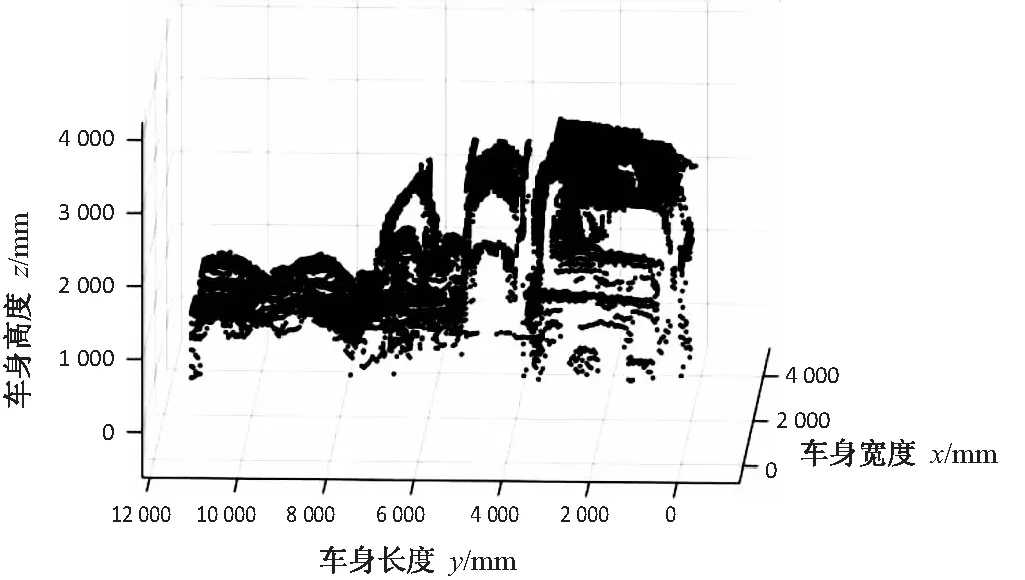
如圖6所示,圖6(a)是半掛車的原始點(diǎn)云數(shù)據(jù),圖6(b)中文獻(xiàn)[9]的算法將噪聲點(diǎn)識(shí)別為車窗邊界,會(huì)使得修復(fù)的車窗在噪聲點(diǎn)處形成了小孔洞,圖6(c)中文中算法對(duì)車窗右上拐角處的噪聲判斷得當(dāng),進(jìn)行了合理去噪,圖6(d)中文中算法在對(duì)半掛車車窗進(jìn)行修復(fù)時(shí),不僅整體車窗效果好,在局部邊緣處,較文獻(xiàn)[9]的算法效果更好。
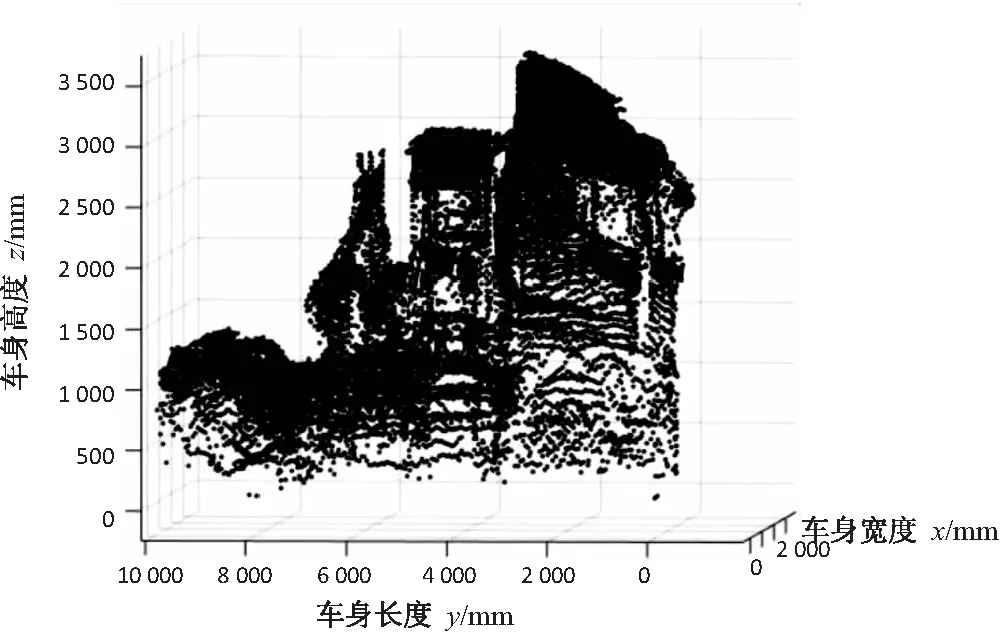
(a)半掛車原始點(diǎn)云
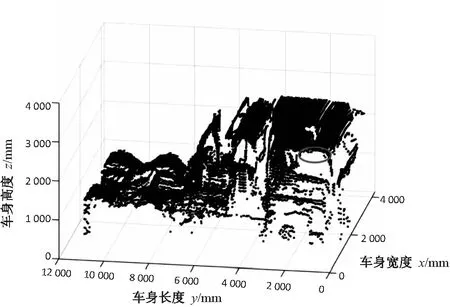
(b)文獻(xiàn)[9]算法去噪
(c)文中算法去噪

(d)文中算法對(duì)半掛車的修復(fù)
4 結(jié)束語
通過上述實(shí)驗(yàn)結(jié)果,可以得到結(jié)論:以點(diǎn)云間距與曲率作為雙閾值進(jìn)行噪聲特征點(diǎn)提取,利用標(biāo)準(zhǔn)差確定閾值,通過閾值確定車窗處噪聲的邊界特征點(diǎn)并完成去噪,用最小二乘法對(duì)車窗邊界進(jìn)行初步擬合,使用基于徑向基函數(shù)的方式對(duì)車窗邊界進(jìn)行優(yōu)化,用梯度下降算法對(duì)徑向基函數(shù)確定點(diǎn)云孔洞進(jìn)行填充,實(shí)現(xiàn)了對(duì)車窗點(diǎn)云數(shù)據(jù)的修復(fù)。綜上所述,該算法可以對(duì)車輛的車窗進(jìn)行數(shù)據(jù)修復(fù),且對(duì)邊緣敏感,行之有效。
猜你喜歡
數(shù)學(xué)小靈通·3-4年級(jí)(2024年2期)2024-05-15 02:02:28
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2022年3期)2022-04-26 14:04:16
數(shù)學(xué)年刊A輯(中文版)(2020年1期)2020-05-19 00:30:36
空間科學(xué)學(xué)報(bào)(2020年2期)2020-04-01 03:50:40
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
中等數(shù)學(xué)(2019年8期)2019-11-25 01:38:14
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
新聞傳播(2018年11期)2018-08-29 08:15:24
數(shù)學(xué)小靈通·3-4年級(jí)(2017年9期)2017-10-13 08:10:54
廣西科技大學(xué)學(xué)報(bào)(2016年1期)2016-06-22 13:10:38