網聯環境下混行車流跟馳行為及車隊組建研究
2021-07-07 09:41:10陳玲娟
武漢理工大學學報(交通科學與工程版) 2021年3期
陳玲娟 孫 遠
(武漢科技大學汽車與交通工程學院 武漢 430065)
0 引 言
智能網聯車借助于車-車通信及車-路通信能提高駕駛速度,減少交通擁堵和降低交通事故發生率,將是未來道路交通領域研究的變革方向.但由于受到技術、政策,以及市場占有率等因素影響,網聯車和普通車混行的狀態將持續存在.因此,本文以車聯網為背景研究混行下的車流運行規律.
在網聯車對交通流影響方面,已有文獻對純網聯車流下的跟馳行為、網聯車隊編組、軌跡優化,多場景下交通流特征分析等方面進行了相關研究[1].在混合車流方面,現有研究主要集中在跟馳模型、交通流穩定性、基本圖及通行能力影響、交通安全、網聯車控制器操縱策略等方面.混行車流跟馳模型方面,Mizanur等[2]開發了信息感知的網聯車駕駛員模型,通過無線連接智能融合從車載傳感器和上游目標CAV上接收數據來跟馳前車.王威等[3]在優化速度模型基礎上,考慮了混合車流中個體車輛對前方情況的不同感知程度,建立了多車間距跟馳模型.Zhu等[4]針對混合交通流,提出了一種可調靈敏度和平滑系數的新數學模型,用來描述智能汽車的運動行為.交通流特性方面主要研究網聯車滲透率對混合車流穩定性、基本圖及通行能力的影響.魏修建等[5]提出了駕駛行為博弈分析假設,并采用元胞自動機模擬仿真,結果表明:網聯車比例越大,交通流穩定性越好.王昊等[6]建立了不同網聯車比例下混合交通流漸進穩定性解析框架.徐桃讓等[7]分別研究了考慮反應時間影響和期望車間時距的交通流基本圖模型.混行交通流安全及穩定性控制方面,秦嚴嚴等通過仿真模擬或實車實驗研究了混合交通流車隊穩定性優化控制及安全駕駛控制方法等[8].
上述針對混合交通流的研究,關注點主要集中在網聯車對道路通行能力的提升程度、對交通安全、對交通流穩定性、能耗和排放等方面的影響,采用仿真模擬手段判斷車隊穩定性及道路通行能力的提升等.提出的網聯車微觀跟馳模型,缺乏考慮網聯車駕駛員和普通車駕駛員在行為決策上的不同,出行場景大多只考慮單車道情況.網聯車用戶在車道選擇,速度調整,跟隨前車等方面均有其特性,從而影響走行時間,通行能力等.因此,本文設定研究場景為包含三車道的快速路或高速路,構建混行車流的微觀跟馳,車隊形成及入口處最優車道選擇等模型,模擬網聯車隊形成過程,分析不同混行比例及設置專用道等管理措施對路網出行參數的影響.
1 混行車流的微觀駕駛行為模型
為研究車聯網環境下的混行車流運行規律,定義一段起點位置為XS=0,終點為XT的高速路或快速路,包含三車道,不含駛入和駛出匝道.車道配置網聯通信設備,可保障車車及車路通信.為貼近實際,定義起點XS處車流到達服從泊松分布,相鄰兩輛車的間隔時間服從負指數分布,即TA(n+1)-TA(n)~Exp(λ),其中TA(n)表示從起點出發的第n輛車的出發時刻.將研究時域[0,T]劃分為K個時段,Δt=T/K.交通流為網聯車和普通車按一定比例分配的混行車流,不考慮匝道駛出,駛入車道不一致及中途追逐更快速度等引起的中途變道行為,著眼于研究不換道假設下車隊形成過程,混行比例,網聯車專用道設置等條件下引起的車流分布,出行成本等的變化.
1.1 混行車流的駕駛規則
當車輛從初始起點處駛入或者處于路段途中運行狀態時,會根據當前車及前車屬性,當前車所處位置,前車駕駛狀態等來選擇頭車或跟隨車的駕駛模式.混行車流運行模式框架圖見圖1.

圖1 混行車流行為框架圖
由圖1可知:網聯車和普通車的運行模式根據前后車距離分為速度調整和跟馳駕駛兩種,其中網聯車跟馳行為將根據前車所在車隊長度選擇加入前車車隊或者組建新車隊.由于普通車和網聯車反應時間,安全間距及駕駛模式等不同,速度調整和跟馳行為同樣存在差異.
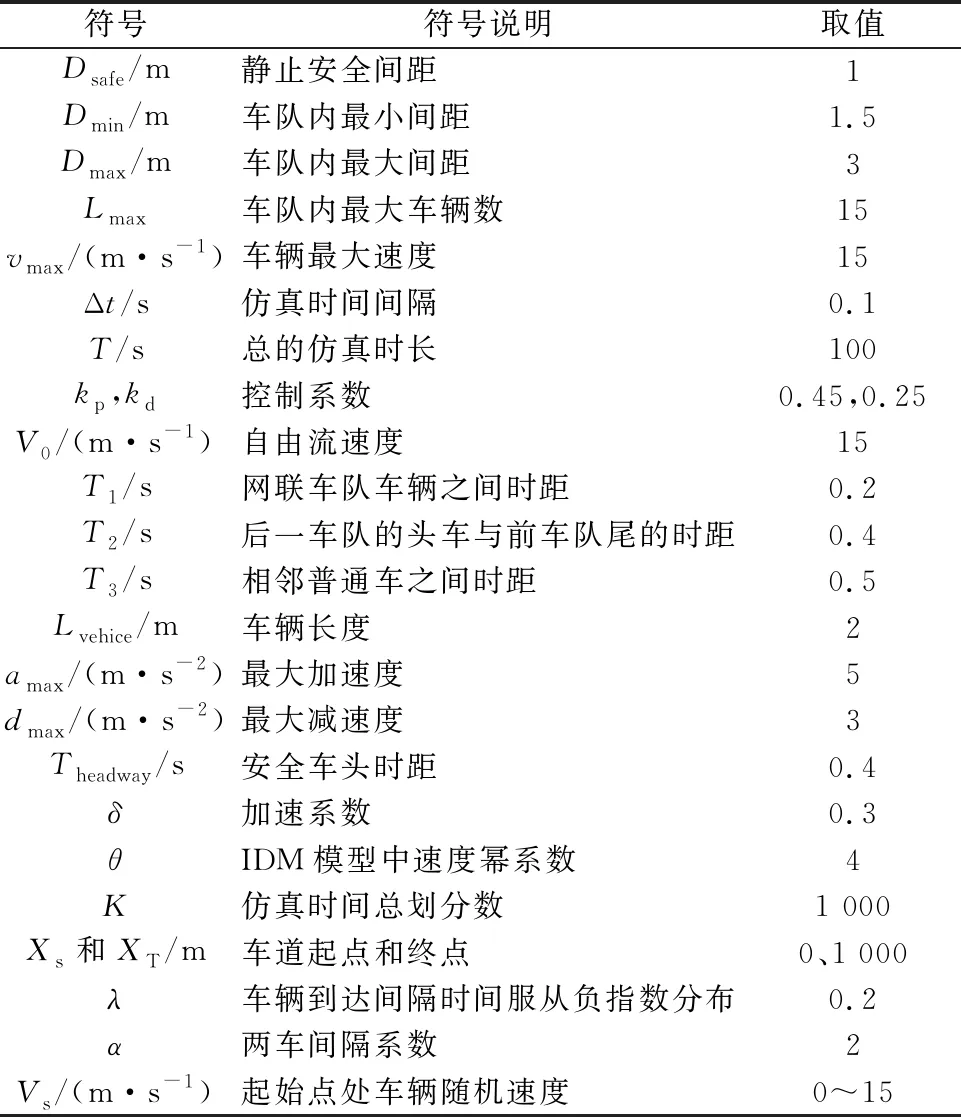
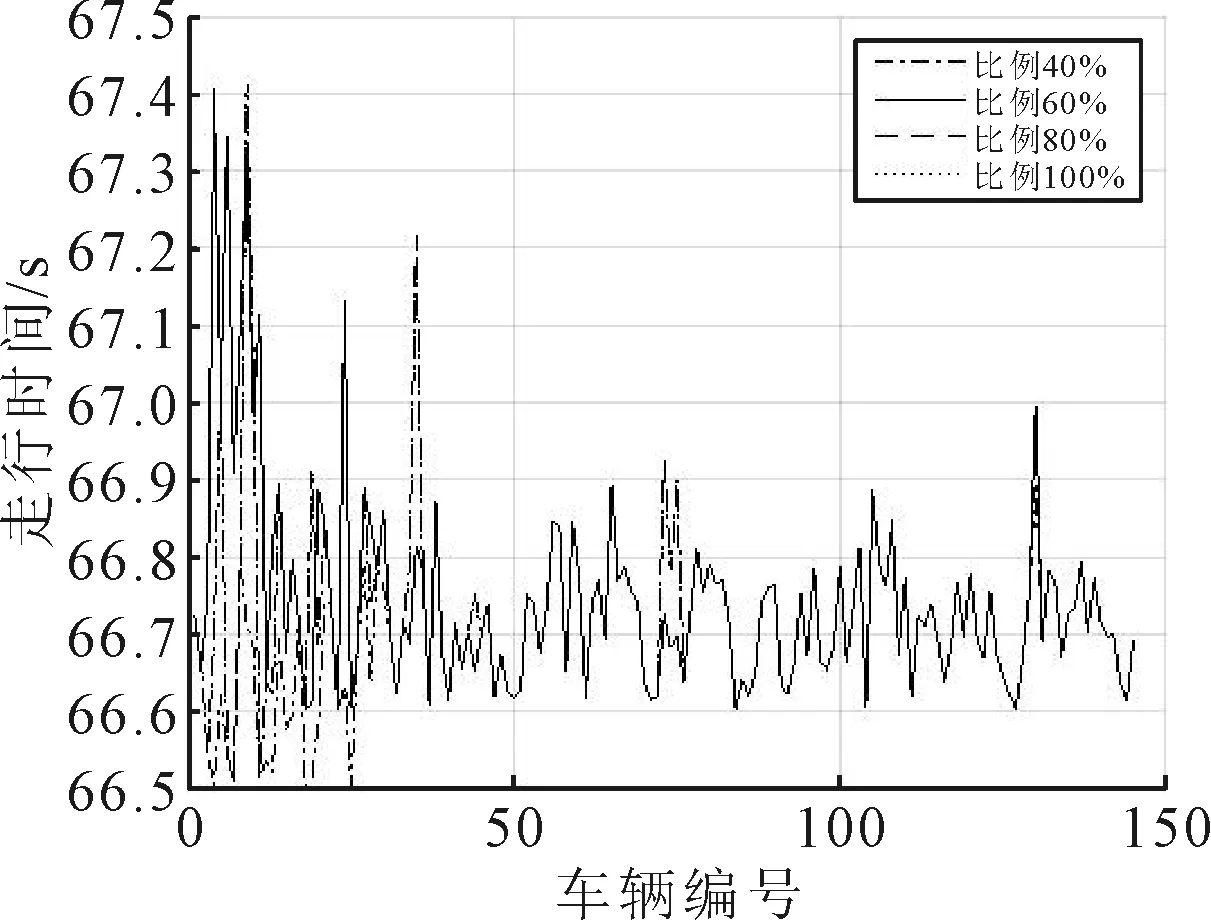
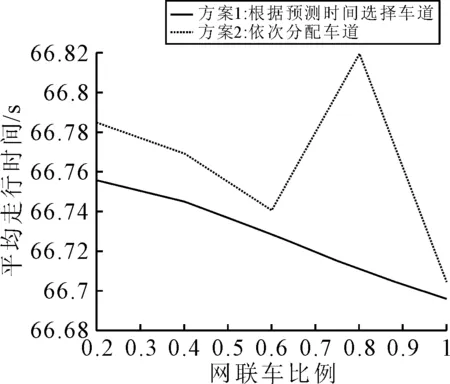
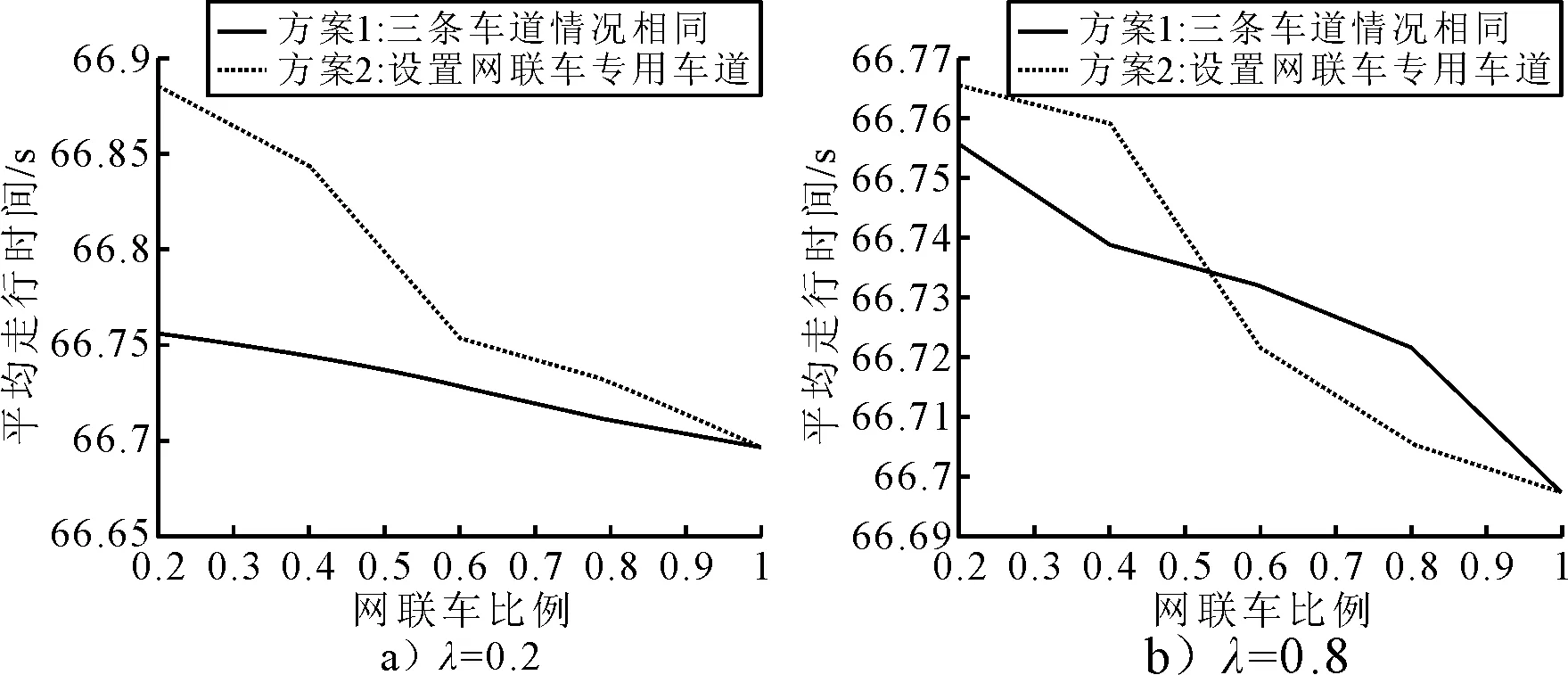
根據前后車類型、最小安全車間距約束可分為三種:車隊內前后網聯車間距,后一車隊的頭車與前車隊尾車間距,普通車與前車間距.T1,T2,T3為對應的反應時距,滿足T1 定義k時段車道l上的車輛Ci,位置記為xi(k),該車道上前車記為Cj,位置記為xj(k),Ci與Cj間距離為sij(k);加速度,速度分別為aj(k),vj(k),Dsafe為最小安全距離;δ為車輛加速系數,α是兩車間距系數. 1) 若sij(k)≥α×Dsafe(若后車為網聯車,Dsafe=T2×vi,若為普通車,Dsafe=T3×vi),此時車間距過大,調整速度縮小間距. vi(k)=vmax,勻速行駛,ai(k+1)=0,vi(k+1)=vi(k) (1) vi(k) (2) 2) 若sij(k)<α×Dsafe,當前車為網聯車,判別前車Cj為網聯車且已進入車隊跟馳狀態,所在車隊總長度小于Lmax,判定Ci允許進入車隊成為跟隨車,開啟車隊內跟隨車跟馳模式;若判別前車Cj所在車隊總長已達到Lmax,Ci將成為新車隊頭車,此時新頭車開啟人工駕駛模式,以T2為反應時間,開啟新車隊頭車跟馳模式. 3) 若sij(k)<α×Dsafe,判別前車Cj為網聯車但處于速度調整階段或者Cj為普通車,開啟以T2為反應時間的人工駕駛模式下網聯車跟馳模式. 4) 若sij(k)<α×Dsafe,當前車為普通車,開啟以T3為反應時間的人工駕駛模式下普通車跟馳模式. 采用美國PATH實驗室提出的CACC算法模型描述網聯環境下車隊間前后車的跟馳駕駛行為,模型表示如下: (3) e(k)=sij(k-1)-sd-T1×vi(k-1) (4) (5) ai(k-1)=(vi(k)-vi(k-1))/Δt (6) (7) 式(3)~(7)中,vi(k),vj(k)分別為k時刻當前車Ci及前車Cj的速度;kp,kd為控制系數,其參數取值分別為0.45 s-2和0.25 s-1;e(k)為k時刻相鄰兩輛車間距的誤差;sij(k-1)為前一時刻相鄰兩輛車的車頭間距;T1為期望反應時距; 采用IDM模型描述人工駕駛模式下的跟馳行為,模型具體如下: s1(k)=Dsafe+ vi(k)=vi(k-1)+ai(k)×Δt (10) x(k+1)=xi(k)+vi(k)×Δt+(k)×Δt2/2 (11) 式(8)~(11)中:amax為最大加速度;v0為自由流速度;θ為速度冪系數;s1(k)為期望車間距離;Dsafe為最小安全間距;Δυij(k)為當前車Ci及前車Cj的速度差;Theadway為安全車頭時距;b為舒適減速度. 考慮車輛在起始點駛入路段時根據交通流運行狀態選擇車道,從而進入速度最快走行時間最省的車道. 1) 穩態判別準則 當車輛經過速度調整,跟馳駕駛形成穩態交通流時,交通流達到平衡態速度ve(0 ①同一車隊內相鄰網聯車間距滿足|xi(k)-xj(k)|=ve×T1; ②不同車隊間相鄰網聯車間距,即后一車隊的頭車與前一車隊的尾車間的車間距滿足|xi(k)-xj(k)|=ve×T2; ③普通車與前車間的車間距滿足|xi(k)-xj(k)|=ve×T3. 2) 駛入車道選擇 符合上述三種情況,則表明車道l上車輛i及前方車輛達到穩態駕駛模式.對車輛i在車道l上從出發時段k開始調用速度調整和跟馳模型,在時段k'進入穩態行駛.則此時預測車輛i的走行時間Til(k)為 (12) 為驗證上述交通流模型,設定起點XS=0,終點XT=1 000 m的仿真路段包含三車道,無進出口匝道.路段設置及混行車流分布見圖2.擬定車輛到達入口處服從泊松分布,即相鄰兩車的間隔時間服從負指數分布,設定分布參數,起始點處車輛速度在0~vmax間隨機取值.為簡化計算,混行車流中網聯車與普通車按一定比例p均勻分布,如網聯車占比p=20%,則到達的第1輛車為網聯車,第2~5輛車為普通車,并依此類推.其他數據取值見表1. 圖2 車道及車流分布圖 表1 參數取值 1) 預測時間下的車道選擇及車流分布 不同網聯車比例下每輛車的走行時間見圖3~4. 圖3 不同比例下每輛車的走行時間 圖4 不同比例下的平均走行時間 由圖3~4可知,各比例下的車輛走行時間均呈震蕩分布,并在后期震蕩逐漸緩和,表明各車道上車流逐漸區域穩定,且隨著網聯車比例的不斷增大,車道上網聯車的數量逐漸變多,因而網聯車輛之間更容易組成車隊行駛,由于車隊行駛所需道路空間較小,且車隊達到平衡態速度比普通車更快更穩定,因此隨著網聯車比例增大平均走行時間降低. 選取網聯車比例p=40%為例描述車隊的形成過程,圖5為在t=100 s時三車道上的車輛位置.圖中,灰色矩形代表普通車輛,黑色矩形代表網聯車輛,在距離起點700 m處,處于第二車道的網聯車正呈穩態的車隊行駛狀態. 圖5 t=100 s車道上車輛位置圖 此時處于車隊內的車輛位置分別是645.643,644.145,642.630,641.140,638.677 m,速度均為15 m/s,加速度均為0,前后車間距分別為1.500,1.515,1.500和2.463 m. 2) 不同車道選擇方案的結果比較 ①在起始處依次選擇車道 處于起點處的車輛依次選擇不同車道,具體車道分配規則如下:第一輛車選擇第一車道,第二輛車選擇第二車道,第三輛車選擇第三車道,第四輛車選擇第一車道,第五輛車選擇第二車道,依此類推.圖6為兩種車道選擇方案下的平均走行時間對比. 圖6 兩種車道選擇方案下的平均走行時間對比 由圖6可知,兩種車道選擇方案相比,在起始點處選擇車道使得平均走行時間降低.在方案1中,當網聯車比例在60%~80%時,發現平均走行時間反而升高,這是由于在該比例下車道的依次分配最終導致各車道上普通車和網聯車交替行駛,所有車輛退化成普通車駕駛模式,反而導致走行時間更長. ②設置網聯車專用道 將第一車道設置為網聯車專用車道,普通車不能選擇進入第一車道行駛,但網聯車可進入第二、第三車道行駛,起點處所有車輛按照預測走行時間選擇車道.仿真結果見圖7~8. 圖7 設置專用道的各車走行時間分布 圖8 不同車輛到達率時兩種方案下平均走行時間對比 由圖7可知,設置專用道方案下各車輛走行時間更趨于平穩,這是由于網聯車集中在專用道,容易形成穩定車隊行駛,其他車道多數為屬性一致的普通車,各時段走行時間趨于相同.圖8a)中,設置專用道時平均走行時間變大,此時λ=0.2,車流密度較小,設置專用道后,普通車可選擇車道變少,給普通車道通行能力造成影響,使其可容納能力和速度變弱.而圖8b)中車輛到達率λ=0.8時,可看到車流密度增大,網聯車比例較小時設置專用道平均走行時間較大,隨著比例增大,走行時間反而更小.這是因為車流密度增大情況下,網聯車比例較小時,再設置專用道反而導致專用道部分能力的“閑置狀態”,而隨著網聯車比例的增大,發揮出行駛在專用道的車隊更穩定,速度更高的優勢,從而降低平均走行時間. 本文分析了混行車流的車隊組建,微觀跟馳等駕駛規則,建立了普通車和網聯車的速度調整及跟馳模型,依據車流穩態判別計算預測走行時間建立了車輛起始點處的車道選擇規則,并通過算例仿真模擬隨機車流在路段的運行狀況,分析了不同網聯車比例,預測走行時間及專用道設置等條件對車輛走行時間及平均走行時間等性能參數的影響,并得出了相應結論.然而在模型構建中,路段場景未考慮駛入駛出匝道,匝道設置將帶來車流匯入和起始終到車道不一致而引起中途變道,因此更實際化運行場景,更全面化車流模型,將是下一步研究方向.1.2 跟馳行為模型
2 入口處駛入車道選擇
3 交通流仿真分析
3.1 算例基礎數據

3.2 結果分析



4 結 束 語