一種高速多體船的有限時間減縱搖控制方法
2021-07-07 10:28:18劉志林戴小康李國勝
張 軍 劉志林 戴小康 李國勝
(江蘇大學(xué)電氣信息工程學(xué)院1) 鎮(zhèn)江 212013) (哈爾濱工程大學(xué)自動化學(xué)院2) 哈爾濱 150001)
0 引 言
高速多體船具有良好的橫向穩(wěn)定性、耐波性、機動性等優(yōu)點[1],是現(xiàn)代高技術(shù)船舶的重要發(fā)展方向.然而在惡劣海況航行時,高速多體船獨特的線型和結(jié)構(gòu)使得縱向傾覆力矩較大,恢復(fù)力矩較小,導(dǎo)致縱搖和升沉變化幅度過大.劇烈變化的縱搖和升沉進(jìn)而產(chǎn)生了過大的垂向加速度,造成船上人員極易暈船,嚴(yán)重影響適航性和工作效率[2].因此,如何有效抑制的升沉和縱搖幅度成為多體船研究的重點.目前高速多體船通常安裝T形翼和壓浪板實現(xiàn)協(xié)同減搖,其中加裝T形翼降低多體船的垂向運動響應(yīng),加裝壓浪板改善船舶運動姿態(tài),達(dá)到減阻的目的[3-4].高速多體船減搖控制的目標(biāo)是同時控制升沉/縱搖運動,減少升沉/縱搖運動幅度.但是,多體船屬于多輸入多輸出系統(tǒng),并且升沉和縱搖運動模型具有多耦合特性,水動力學(xué)系數(shù)很難精確獲得,系統(tǒng)存在不確定動態(tài)和其他未建模特性,這給減搖控制帶來了困難.
目前,多體船減搖控制方面的研究文獻(xiàn)較少.針對多體船的非線性耦合模型,文獻(xiàn)[5]采用縱搖/升沉分離設(shè)計比例微分控制律,通過傳遞函數(shù)的解耦矩陣實現(xiàn)升沉和縱搖的解耦,大幅限制了升沉和縱搖運動幅度,但是該方法需要花費大量的時間離線調(diào)試參數(shù),魯棒性較弱.為了解決魯棒減搖問題,文獻(xiàn)[6]基于Golubev算法建立了從T形翼和壓浪板到升沉、縱搖運動的傳遞函數(shù),設(shè)計高階定量反饋縱向減搖控制器.但是,該方法不能減小縱搖/升沉系統(tǒng)之間的強耦合非線性關(guān)系,無法解決多體船在整個航跡內(nèi)的控制問題.文獻(xiàn)[7]提出了高速多體船升沉和縱搖的多變量H∞魯棒控制策略,設(shè)計出了滿足系統(tǒng)魯棒性能要求的控制器,但是需要求解高維線性矩陣不等式,計算復(fù)雜很難應(yīng)用于實際中.
擴(kuò)張狀態(tài)觀測器是解決含有模型不確定情況下控制問題的有效手段,能夠有效估計和補償模型不確定性帶來的影響[8-11],但是對于復(fù)雜多通道系統(tǒng)的耦合運動量觀測及補償問題研究較少.針對多體船升沉和縱搖的多耦合、不確定性的控制問題,本文采用反饋+補償?shù)牟呗裕刺岢隽擞邢迺r間反饋控制+有限時間擴(kuò)張觀測器在線估計方法,設(shè)計解耦的減搖控制方法.首先,建立由T形翼和壓浪板作為減搖附體的多體船控制模型,將控制模型分解為解耦模型和耦合量兩項.其次,將縱搖和升沉運動的耦合量作為不確定量,采用有限時間擴(kuò)張觀測器快速在線實際估計進(jìn)行補償;對解耦的縱搖和升沉模型設(shè)計有限時間反饋控制律來補償擴(kuò)張觀測器觀測狀態(tài)和干擾的誤差,以此提高閉環(huán)系統(tǒng)抑制干擾的能力和魯棒性.最后,將反饋控制和補償控制量進(jìn)行綜合,獲得了虛擬的控制量,通過減搖附體控制分配矩陣得到T形翼和壓浪板的攻角.最后,通過仿真驗證所提算法的有效性.
1 高速多體船的垂向運動模型
1.1 高速多體船的耦合垂向運動模型
T形翼和壓浪板利用翼面產(chǎn)生的恢復(fù)力和力矩用來抵消波浪的力和力矩,從而減小升沉和縱搖的幅度.假設(shè)多體船以穩(wěn)定航向和定常速度在無限深水域航行,水下部分的片體足夠細(xì)長,波浪擾動引起的船體運動微輻,不考慮風(fēng)和流對運動的影響.在海浪擾動作用下,關(guān)于升沉和縱搖耦合運動的數(shù)學(xué)模型為
(1)
(2)

(3)
MT-foil=FT-foillT-foil,Mflap=Fflaplflap
式中:ρ為海水密度;A為T形水翼面積;CL為水翼的升力系數(shù);V為流體相對水翼的速度;CL1為壓浪板升力系數(shù);S為壓浪板的有效面積;α1為壓浪板攻角;α2為T形翼攻角;lflap,lT-foil為壓浪板和T形翼的力臂.從式(3)可見:多體船運動模型的縱搖和升沉運動具有相互耦合特點,并且水動力學(xué)系數(shù)是通過船模或?qū)嵈囼灉y得,具有較強的不確定性.高速多體船的減搖控制目標(biāo)是同時控制升沉/縱搖運動,減少升沉/縱搖運動幅度,并抑制參數(shù)不確定和海浪擾動.
1.2 建立解耦的垂向運動模型

(4)
式中:x11,x22為縱搖和縱搖角速度,這里作為解耦升沉模型的不確定項;Δf1為升沉運動模型的參數(shù)不確定項.解耦的升沉模型(4)改寫為下面的一般不確定形式
(5)

采用圖1的反饋+補償?shù)牟呗栽O(shè)計解耦減搖控制,其中有限時間擴(kuò)張觀測器估計補償縱搖和升沉運動和耦合量,有限時間反饋控制提高閉環(huán)反饋控制的減搖性能.
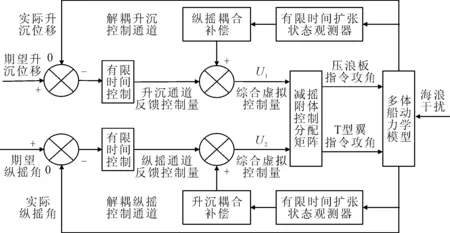
圖1 多體船的縱向減搖解耦控制框圖
2 解耦縱搖和升沉的擴(kuò)張狀態(tài)觀測器

(6)
設(shè)計了一種非齊次的有限時間內(nèi)收斂的擴(kuò)張狀態(tài)觀測器.
(7)

(8)
構(gòu)造Lyapunov函數(shù)[12]
(9)
寫成下面形式
V=ξTPξ
(10)

由式(10)得
(11)
對ξ求導(dǎo)可得
(12)

對式(10)求導(dǎo)可得
(13)

(14)
由式(14)可得
(15)
根據(jù)式(11)可求得
(16)
則式(16)可寫成
(17)
根據(jù)有限時間穩(wěn)定引理1,如果λmin{Ω1}‖ξ‖2≥L‖Γ‖2,則誤差系統(tǒng)是有限時間穩(wěn)定的,且在有限時間內(nèi)收斂到
(18)
因此,可選擇合理的參數(shù)使得L‖Γ‖2/λmin{Ω1}<1,則誤差系統(tǒng)‖ξ‖2在有限時間內(nèi)充分小.
3 有限時間控制器設(shè)計
采用有限時間擴(kuò)張觀測器在線快速估計升沉和縱搖運動的耦合量,但是擴(kuò)張狀態(tài)觀測器在耦合量和海浪隨機擾動變化過大時觀測能力下降,影響整體減搖控制效果.為了進(jìn)一步提高減搖控制效果,減搖反饋控制律采用有限時間控制,這是因為有限時間控制器中帶有分?jǐn)?shù)冪項,使得有限時間閉環(huán)控制系統(tǒng)與非有限時間閉環(huán)控制系統(tǒng)相比,具有更好的魯棒性能和抗擾動性能[13-14].
對于解耦的升沉運動系統(tǒng)模型為
(19)
設(shè)計如下形式有限時間控制輸入
u1=(m+a33)[-k1siga1x1-k2siga2x2-
(20)

證明:將控制律式(20)代入系統(tǒng)式(19),得到
(21)
選定Lyapunov函數(shù)為
對其求導(dǎo)得到
(22)

將解耦的縱搖和升沉反饋控制量和耦合項估計值進(jìn)行綜合,獲得縱搖和升沉的虛擬控制量為
(23)
(24)

(25)
將控制律式(23)代入升沉模型式(5),其系統(tǒng)閉環(huán)形式為
(26)
選定Lyapunov函數(shù)為
(27)
對其求導(dǎo)有

(28)
由于在有限時間內(nèi)擴(kuò)張觀測器的觀測誤差是充分小,因此|e3|是有界,升沉控制閉環(huán)系統(tǒng)是有界穩(wěn)定.同理可證,縱搖控制系統(tǒng)是有界穩(wěn)定.
4 仿真分析
根據(jù)文獻(xiàn)[3]的多體船模型來驗證設(shè)計的有限時間減搖方法有效性.多體船在高速航行時受到的海況等級為四級海況,海浪采用P-M譜進(jìn)行仿真,為
式中:vζ為海面以上高度為19.5 m處的平均風(fēng)速,m/s;g為重力加速度,9.81 m/s2;Sζ(ω)單位為m2·s.根據(jù)切片法,求得不同頻率點下海浪作用于多體船的干擾力和干擾力矩,通過數(shù)據(jù)擬合和疊加的方法,仿真過程中,多體船航速為14 kn,迎浪航行,遭遇角頻率取1.3 rad/s,可以得到隨機海浪作用于多體船的干擾力和干擾力矩,見圖2.分別用帶有減搖控制器與不加控制器的多體船進(jìn)行仿真比較分析,仿真結(jié)果見圖3~4.

圖2 升沉力和縱搖力矩干擾

圖3 多體船的升沉和縱搖運動曲線

圖4 實際和估計的升沉位移和速度
由圖3可知,多體船在解耦減搖控制作用下下,升沉運動量減少20%~35%,縱搖運動量減少40%~50%,升沉與縱搖的減搖達(dá)到預(yù)期效果,這說明對于升沉和縱搖的耦合處理策略合理有效.由圖4可知,設(shè)計的有限時間擴(kuò)張狀態(tài)觀測器估計升沉位移的觀測誤差很小,但是估計升沉速度時觀測能力下降,有明顯的觀測誤差,在本文提出的有限時間反饋控制律作用下,可有效抑制了觀測器誤差和模型不確定性,保持較好的減搖效果.
5 結(jié) 束 語
為了解決高速多體船在航行中縱搖和升沉運動幅度過大的問題,提出一種有限時間減縱搖控制方法.建立由T形翼和壓浪板作為減搖附體的解耦縱搖和升沉的控制模型,設(shè)計有限時間控制律提高了閉環(huán)系統(tǒng)的魯棒性.提出有限時間擴(kuò)張觀測器快速在線估計縱搖和升沉的耦合項,將反饋控制量和補償量進(jìn)行綜合,通過減搖附體控制分配矩陣得到T形翼和壓浪板的攻角,并通過數(shù)字仿真驗證所提算法的有效性.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19