閥廳巡檢機(jī)器人控制系統(tǒng)設(shè)計(jì)與實(shí)現(xiàn)探究
2021-07-07 07:35:24國(guó)網(wǎng)福建檢修公司何志甘付勝憲范彥琨陳德興
電力設(shè)備管理 2021年6期
國(guó)網(wǎng)福建檢修公司 何志甘 付勝憲 范彥琨 陳德興
巡檢機(jī)器人就是替代或協(xié)助人們開展好巡邏、巡檢、安防等對(duì)應(yīng)工作的機(jī)器人,可讓機(jī)器人按照閥廳巡檢作業(yè)的實(shí)際要求和規(guī)劃路徑精確執(zhí)行并停留在對(duì)應(yīng)的位置上,通過針對(duì)巡檢設(shè)備進(jìn)行表計(jì)讀數(shù)記錄、紅外測(cè)溫、異常狀態(tài)報(bào)警等,最終就可發(fā)揮巡檢數(shù)據(jù)的實(shí)時(shí)上傳、報(bào)表生成、信息顯示等后臺(tái)功能。巡檢機(jī)器人帶有穩(wěn)定性、可靠性、效率高等優(yōu)勢(shì),現(xiàn)階段在電力系統(tǒng)之中得到廣泛的應(yīng)用。
1 閥廳巡檢機(jī)器人控制系統(tǒng)設(shè)計(jì)與實(shí)現(xiàn)
1.1 作業(yè)任務(wù)分析
基于巡檢標(biāo)準(zhǔn)開展針對(duì)性分析,與閥廳作業(yè)的具體情況結(jié)合起來,按照調(diào)研結(jié)果的實(shí)際分析,再配合相應(yīng)產(chǎn)品功能的實(shí)際參考,這樣就可得出對(duì)應(yīng)的結(jié)論。閥廳巡檢任務(wù)主要包含:對(duì)電氣儀表顯示的各種電參數(shù)進(jìn)行讀取與記錄,探查電力變壓器油箱焊縫的實(shí)際可靠性及測(cè)量油溫、油液位和油壓數(shù)據(jù),探查各個(gè)位置上套管外滲漏情況,從而合理地檢查層間短路情況和運(yùn)行時(shí)段線圈的閘間短路情況;針對(duì)變壓器內(nèi)部是否有放電、擊穿現(xiàn)象進(jìn)行檢查;監(jiān)控冷卻系統(tǒng),從而了解散熱器、出風(fēng)口等相應(yīng)的實(shí)際情況[1]。
1.2 機(jī)器人運(yùn)動(dòng)執(zhí)行機(jī)構(gòu)
閥廳巡檢機(jī)器人利用輪臂復(fù)合機(jī)構(gòu)就可滿足運(yùn)動(dòng)的實(shí)現(xiàn)。輪臂復(fù)合機(jī)構(gòu)主要是針對(duì)閥廳巡檢機(jī)器人加以控制,這樣就可滿足架空電力輸電線路及電力設(shè)備場(chǎng)所的直接行程,可實(shí)現(xiàn)跨越桿塔障礙物的要求。在實(shí)際運(yùn)行中,其主要包含了機(jī)械夾持手臂、行走機(jī)械動(dòng)輪、機(jī)械夾持爪,基于機(jī)械夾持爪和機(jī)械行走動(dòng)輪就可選擇旋轉(zhuǎn)關(guān)節(jié)機(jī)構(gòu)和可伸縮關(guān)節(jié)機(jī)構(gòu),從而將其安置在機(jī)械夾持手臂上,之后利用夾持手臂就能直接連接到滑動(dòng)機(jī)械導(dǎo)軌上。閥廳巡檢機(jī)器人能夠基于滑動(dòng)機(jī)械導(dǎo)軌,通過步進(jìn)電機(jī)最終滿足自由滑動(dòng)的要求。單機(jī)械夾持爪在實(shí)現(xiàn)抓線時(shí)會(huì)逐漸將巡檢機(jī)器人的中心調(diào)整,讓其處于機(jī)械夾持手臂和夾持機(jī)械爪上,這樣就可實(shí)現(xiàn)對(duì)巡檢機(jī)器人運(yùn)動(dòng)姿態(tài)穩(wěn)定性的保護(hù)。電力巡檢機(jī)器人箱體主要是用于各種傳感器、機(jī)器人主控制單元、高清視頻攝像頭、步進(jìn)電機(jī)等硬件設(shè)備的攜帶。
1.3 控制系統(tǒng)的硬件設(shè)計(jì)
1.3.1 控制系統(tǒng)的硬件組成
本文所設(shè)計(jì)的閥廳巡檢機(jī)器人硬件見圖1,主要包含了工業(yè)計(jì)算機(jī)、光傳感器、視頻攝像頭、主控單元、姿態(tài)傳感器、無線數(shù)據(jù)傳輸設(shè)備、步進(jìn)電機(jī)等對(duì)應(yīng)的硬件。
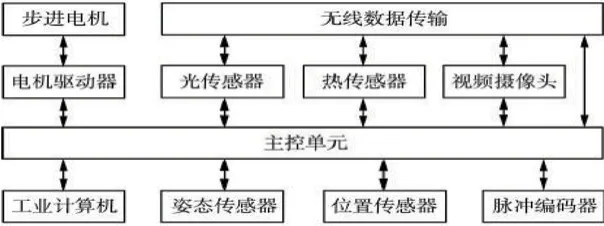
圖1 控制系統(tǒng)硬件組成
1.3.2 控制系統(tǒng)的硬件功能
閥廳巡檢機(jī)器人控制系統(tǒng)的上位機(jī)角色為工業(yè)計(jì)算機(jī),這樣可滿足顯示閥廳巡檢機(jī)器人的工作狀態(tài),如所處位置、作業(yè)項(xiàng)目、作業(yè)進(jìn)度等相應(yīng)的內(nèi)容,并會(huì)提醒操作人員對(duì)應(yīng)的內(nèi)容;姿態(tài)傳感器本身可直接采集姿態(tài)信息,掌握動(dòng)作信息,直接將其信息傳遞給主控單元,通過其控制要求和傳感器回傳信息相互的結(jié)合,就可滿足綜合性判斷的要求,從而針對(duì)閥廳巡檢機(jī)器人加以控制,讓其可以進(jìn)行下一步操作;步進(jìn)電機(jī)和電機(jī)驅(qū)動(dòng)器可滿足針對(duì)性的閥廳巡檢機(jī)器人的控制要求,可將執(zhí)行動(dòng)作信息從主控單元中獲取,然后通過機(jī)器人來實(shí)現(xiàn)后續(xù)具體動(dòng)作要求;光傳感器的功能實(shí)現(xiàn)主要是利用高精度的光信號(hào),其本身是針對(duì)擊穿、閃絡(luò)等問題加以了解。當(dāng)出現(xiàn)上述幾種現(xiàn)象時(shí)可在第一時(shí)間做出反應(yīng),直接在主控單元中落實(shí)故障信息,然后與傳感器信息相互結(jié)合,就可實(shí)現(xiàn)綜合化的處理,并會(huì)對(duì)應(yīng)的將信息傳遞給上位機(jī),這時(shí)工作人員就可獲取某一時(shí)間段、某一地點(diǎn)出現(xiàn)的放電、閃絡(luò)、擊穿等故障情況,按照相應(yīng)的操作規(guī)程進(jìn)行下一步的操作。
熱傳感器可辨識(shí)高精度熱力源,能實(shí)現(xiàn)對(duì)設(shè)備實(shí)際運(yùn)行位置發(fā)熱情況進(jìn)行針對(duì)性的監(jiān)測(cè)。當(dāng)有溫度超標(biāo)情況出現(xiàn)就會(huì)及時(shí)反應(yīng),直接傳遞主控單元故障的相關(guān)信息,然后與傳感器信息直接結(jié)合,完成后續(xù)的綜合處理需求,告知上位機(jī)實(shí)際的信息,促使工作人員清楚了解具體的溫度超標(biāo)情況,然后針對(duì)性開展判斷,落實(shí)下一步操作;商品攝像頭主要是實(shí)時(shí)觀察閥廳巡檢機(jī)器人的具體環(huán)境情況,等采集到視頻信息后就可及時(shí)上傳到上位機(jī)加以顯示。如果其余傳感器檢測(cè)到部分問題,視頻傳感器就可將監(jiān)測(cè)問題現(xiàn)場(chǎng)的實(shí)際情況及時(shí)傳遞回來,以便于操作人員根據(jù)現(xiàn)場(chǎng)情況制定下一步工作計(jì)劃,做好維修作業(yè)所需工具的準(zhǔn)備工作;位置傳感器主要是實(shí)時(shí)定位閥廳巡檢機(jī)器人,然后將位置信息及時(shí)傳遞到上位機(jī),以便于操作人員對(duì)機(jī)器人的實(shí)際情況進(jìn)行分析;無線傳輸設(shè)備在交換數(shù)據(jù)的前提下直接上傳對(duì)應(yīng)的實(shí)時(shí)參數(shù),能針對(duì)巡檢設(shè)備的具體信息進(jìn)行分析,這樣就可按照上位機(jī)的指令將下一步的操作落實(shí)[2]。
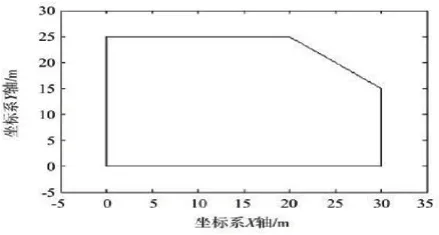
圖4 電力巡檢機(jī)器人全部運(yùn)動(dòng)軌跡線路圖
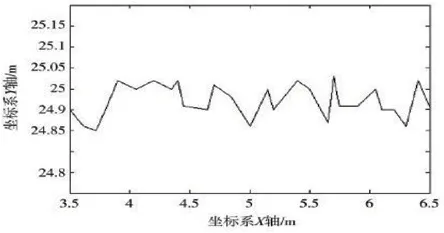
圖5 電力巡檢機(jī)器人局部運(yùn)動(dòng)軌跡線路圖
1.4 控制系統(tǒng)的軟件設(shè)計(jì)
在本系統(tǒng)的軟件設(shè)計(jì)中,主要是通過C語(yǔ)言來實(shí)現(xiàn)控制代碼的開發(fā),基于CCS3.3的環(huán)境分析處理TMS320F2812控制芯片的軟件編程。系統(tǒng)軟件基于程序執(zhí)行情況來合理進(jìn)行劃分處理,其主要囊括了運(yùn)動(dòng)控制功能、數(shù)據(jù)通信、信息采集等諸多模塊。運(yùn)動(dòng)控制模塊包含了加速、前進(jìn)、后退、停止、減速等閥廳巡檢機(jī)器人的運(yùn)動(dòng)模式;數(shù)據(jù)通訊的模塊基于通訊協(xié)議,就可開發(fā)其通信控制代碼,這樣才能上傳數(shù)據(jù)并完成控制命令接受等相關(guān)的工作。流程圖見圖2,在機(jī)器啟動(dòng)后基于指令來完成一系列的操作,其中停止為最高優(yōu)先級(jí),之后才是轉(zhuǎn)彎與直行,機(jī)器人接收到停止命令后就會(huì)停留在原地等待下一次執(zhí)行命令[3]。
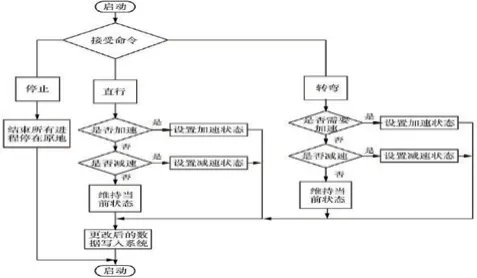
圖2 運(yùn)動(dòng)控制軟件流程
2 案例實(shí)證
閥廳巡檢機(jī)器人基于實(shí)驗(yàn)室模擬環(huán)境進(jìn)行運(yùn)動(dòng),實(shí)際的預(yù)定運(yùn)動(dòng)軌跡線路見圖3,主要是針對(duì)位置信息,基于顯示軌跡對(duì)運(yùn)行控制程序性能進(jìn)行分析和記錄處理。通過實(shí)際的情況分析,在到達(dá)預(yù)定地點(diǎn)后,閥廳巡檢機(jī)器人就可開展相應(yīng)的巡檢作業(yè),但要求其實(shí)際運(yùn)動(dòng)誤差需控制在3cm內(nèi),其實(shí)際角度誤差不允許超出0.1rad。要求其閥廳機(jī)器人直接離開巡檢點(diǎn)朝著后續(xù)巡檢點(diǎn)移動(dòng),不過可能會(huì)導(dǎo)致其位置誤差超出3cm,角度誤差也會(huì)有超過0.1rad的情況,這主要是因?yàn)樵趯?shí)際加速或減速中就會(huì)因?yàn)樽灾貑栴}而引起慣性。在項(xiàng)目的測(cè)試環(huán)節(jié),閥廳機(jī)器人沒有出現(xiàn)任何擊中障礙物的問題,也沒有與預(yù)定運(yùn)動(dòng)路線相互偏離的問題出現(xiàn)。基于此,該閥廳巡檢機(jī)器人就可在不同場(chǎng)合滿足電力巡檢作業(yè)的實(shí)際要求,同時(shí)滿足實(shí)際的工況要求[4]。
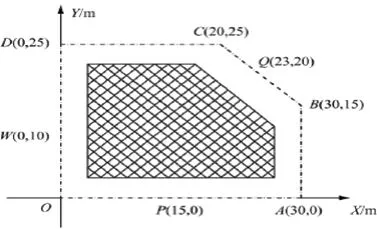
圖3 電力巡檢機(jī)器人預(yù)定運(yùn)動(dòng)軌跡線路圖
猜你喜歡
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
當(dāng)代工人(2020年8期)2020-05-25 09:07:38
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
中華手工(2017年2期)2017-06-06 23:00:31
故事大王(2016年7期)2016-09-22 17:30:08
科技知識(shí)動(dòng)漫(2016年8期)2016-07-29 20:40:09
兒童故事畫報(bào)·發(fā)現(xiàn)號(hào)趣味百科(2015年12期)2016-01-25 00:41:49
中外會(huì)展(2014年4期)2014-11-27 07:46:46
兒童故事畫報(bào)(2013年3期)2013-06-24 05:40:30
小哥白尼·軍事科學(xué)畫報(bào)(2009年9期)2009-09-14 03:18:56
