基于多旋翼無人機的輸配電線路故障精確測距研究
2021-07-11 08:16:26孫嬙張志林林財徳林雅云王霖露
電子設計工程 2021年13期
孫嬙,張志林,林財徳,林雅云,王霖露
(國網福建省電力有限公司漳州供電公司,福建漳州 363000)
輸配電線路的安全可靠性影響著用戶的用電質量[1],因此,保證其正常運行、及時解決輸配電線路故障問題對于電力輸送具有重大意義[2]。
輸配電線路輸電方式多為小電流電路接電方式,線路故障特征并不明顯,分布式電源連接以及分支輸電線路數量龐雜致使輸配電線路結構更加復雜,而由于線路測量方式的局限性,對于線路故障精確測距方面的問題仍需加大解決力度,目前的輸電線路巡查一般以人工及直升機巡查的方式進行,可以在電路輸電過程中完成數據的精確測量,但易受天氣因素的影響,無法保證數據的測量結果,甚至影響到自身工作狀態,加之輸配電線路的結構復雜性以及線路電容極小性,容易導致電路電流產生不平衡的狀況,造成混亂電流磁場,進一步加大了電流故障的檢測難度與檢測數量,增添測距的干擾因素[3]。傳統輸配電線路故障測距研究雖在一定程度上提升了測距的精準性,但無法保證測距電流的穩定性,且投入的成本較高、測距效率較低。針對上述問題,文中提出一種新式基于多旋翼無人機的輸配電線路故障精確測距研究,對以上問題進行解決。
文中首先對輸配電線路進行圖像視頻數據的獲取,利用多旋翼無人機紫外相機收集輸配電線路的圖像數據,并將獲取的數據記錄,在成像的基礎上完成分析,進一步對線路故障進行算法確認,通過模擬優化粒子群算法選取數據的優化解,最終利用μPMU相量信息對輸配電線路進行精準測距,將相角相等作為約束條件,完成對輸配電線路的故障精準測距研究[4]。該研究在一定程度上減少了干擾因素的影響,提升了測距的精準程度,具有更好的可發展性。
1 輸配電線路圖像視頻數據獲取
由于輸配電線路的結構較為復雜,為此,需對其進行初步的圖像獲取操作,利用紫外相機拍攝線路圖像,根據其兩翼載荷系統的兩軸增穩云臺以及雙通道圖像紫外檢測儀對圖像進行進一步的獲取,采用相機內部機械結構與編碼器之間的緊密配合系統對圖像分解,同時安裝陀螺數據敏感裝置,以此來穩定多旋翼無人機的飛行系統,以保證拍攝圖像的清晰度,進一步穩定輸配電線路的輸電回路,使云臺在搖擺及振動的狀態下依舊保持自身穩定,進而輸出穩定清晰的線路圖像[5]。將云臺控制器外部的接口與內部系統接口相連接,并經過飛行控制系統進行傳送交流,同時保證對數據的安全接收,利用對陀螺信息的采集進一步提升對電機位置的閉環增穩控制,準確采集電暈放電現象信息,同時對紫外可見影像進行成像收集,將經過系統處理后的成像與可見光分析圖像進行疊加操作,明確線路圖像的精準位置,加大對電暈電路的強度處理,提高對電力設備的狀態檢測力度,保證輸配電線路的自身安全性,利用雙通道紫外成像設備加強監管操作,穩定紫外相機拍攝路徑,同時加強對紫外相機零件選型的管理力度,在達到輕量化設計的基礎上提升傳感器配置標準[6-8]。其雙通道紫外成像設備組成如圖1 所示。
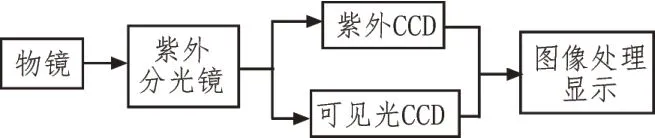
圖1 雙通道紫外成像設備組成
通過實時串口裝置對系統工作狀態進行數據反饋操作,并屏蔽產生的其他光源干擾信息,將可見光數據視頻分解,利用收集到的紫外光與可見分離光的具體信息分析線路圖像存在的故障可能發生點,并進一步執行后續操作[9-10]。
2 輸配電線路故障確認算法設計
在經過對輸配電線路故障圖像的獲取后,進一步對其故障進行算法確認。在變電站內部安裝行波檢測儀器,由于輸配電線路由多條分支線路構成,為此需仔細分析每條線路的安裝條件,并找出主線路對其進行集中處理安裝,減少不必要的安裝浪費,并利用點狀分布的方式進行安裝分布,便于后續對故障點的查找與分析[11-13]。
在行波檢測起初,需對優化目標進行確定,進而保證在線路產生故障時可以同時整合多條支路信息進行故障位置分析,及時準確查找故障位置[14]。同時對尋找優化問題進行定位,利用較少的檢測裝置對線路進行追蹤定位,同時設置優化約束條件作為輸配電線路之間的拓撲結構來源,進一步將線路進行整體分層,提升故障確認的清晰率,加強優化的信息結構。
在分層的過程中進一步確認行波檢測裝置的點式分布狀態,定位故障的標準狀態,合理分配輸配電線路總體電網結構[15],尋找主源節點,將經過的最短路徑中的節點標記出來,并優化布點條件,線路故障獲取算法確認:
1)將算法的測量電阻溫度初始化,設置穩定的退火速度,將算法的慣性常數與加速度進行集中確認,并生成常數數值。
2)利用預先設定的優化目標對適應度數值進行判定。
3)將設定的粒子數值與測量的實際極值進行比較,并分析最佳優化數值,獲取經過更新后的粒子數值。
4)進一步更新粒子的位置與速度同時統一粒子速度。
5)計算更新后的粒子適應度數值。
6)更新適應度的變化量,在接收到新的粒子位置數值后,降溫并返回原始系統。
3 輸配電線路故障精確測距
在實際參數測量中,由于線路的特殊性,將對測量結果產生一定影響,需進一步對線路狀態進行保護與檢查,文中構建輻射狀的輸配電線路模型進行研究,其模型如圖2 所示。

圖2 輸配電線路仿真模型圖
對不同的線路進行選型與長度研究,從中挑選出最適宜的測量長度,同時考慮線路間的耦合狀況,進行相位平衡檢測,進行對角線元素對比分析,在線路運行正常的狀態下對運行范圍與故障點范圍進行查找,選取電阻誤差值[16],加大誤差處理,充分利用相量信息減少誤差率,進而提升故障測距的精準率。利用雙端測距與雙端信息之間的條件關系對故障距離進行確定,在故障收斂點附近降低電壓負荷數值,并適當考慮相角關系,及時檢查測距時的系統狀態,隨時為其補充保護裝置,利用相角與輻射角的精確數據增強相位的條件約束,將其固定到一定的范圍內,對線路降壓方面進行進一步的加強訓練,并結合線路阻抗[17],加強數據理論分析,縮減理論誤差,強化線性元素之間的抗阻性,并對線路運行過程中進行歐姆定律條件約束,由于故障狀態下的首末端電流通過量不同,為此,利用線路兩端的μPMU 對電流相量進行測量,準確完成數據的檢測收集,將目標函數設置為凸函數,并將函數進行復合操作,降低其重復耦合率,對故障前后的數據測量條件進行固定,最終完成對輸配電線路的故障精確測距研究[18]。
4 實驗與研究
4.1 實驗目的
為了檢測文中基于多旋翼無人機的輸配電線路故障精確測距研究的結果,與傳統輸配電線路故障精確測距研究進行對比,并分析實驗結果。
4.2 實驗模型構建
針對輸配電線路的結構復雜性以及故障查找困難性,對其進行故障精確測距研究,并構建基于多旋翼無人機的輸配電線路故障精確測距模型,如圖3所示。
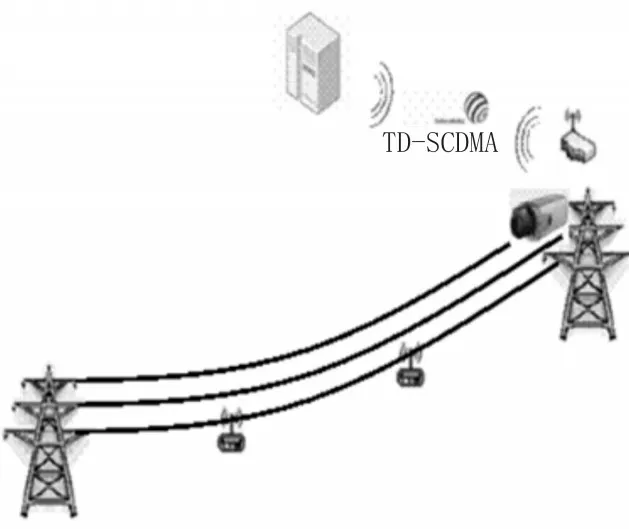
圖3 輸配電線路故障精確測距模型
根據上述輸配電線路故障精準測距模型,進行實驗參數的設定,如表1 所示。
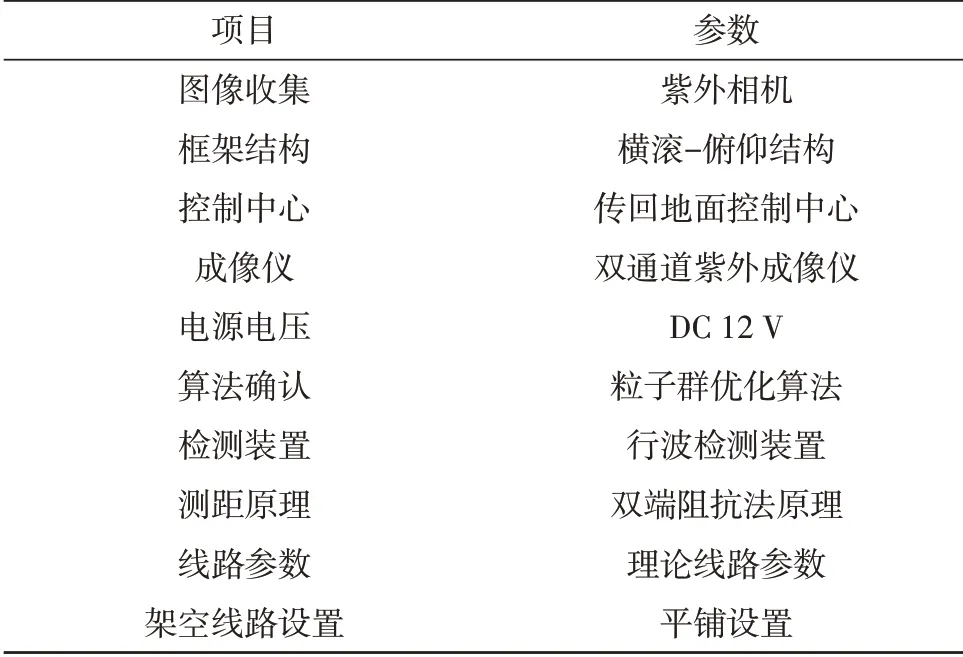
表1 實驗參數表
4.3 實驗結果與分析
根據上述輸配電線路故障精確測距模型進行實驗對比,將文中基于多旋翼無人機的輸配電線路故障精確測距研究的效果與傳統輸配電線路故障精確測距研究的效果進行比較,得到的故障檢測時間對比圖與測距準確率對比圖如圖4、5 所示。
1)故障檢測時間對比圖
由圖4 可知,在相同的參數條件下,文中研究方法的輸配電線路故障檢測所用時間較短,而傳統研究方法的輸配電線路故障檢測所用時間較長,造成此種差異的主要原因在于文中對輸配電線路進行圖像數據的收集,利用紫外成像的原理提升數據查找力度,根據可見光的切換實現對多旋翼無人機的飛行控制,進一步完善圖像的采集方式,提升圖像收集的數量與清晰度,并從中尋找到有利數據實現對圖像的研究與分析,增強故障圖像信號的接收速率,進而減少檢測故障檢測所需時間。

圖4 故障檢測時間對比圖
2)測距準確率對比圖
由圖5 可知,在實驗時間為5 d 時,文中研究的測距準確率為88%,傳統研究的測距準確率為41%,在實驗時間為10 d 時,文中研究的測距準確率為92%,傳統研究的測距準確率為51%。由于文中對輸配電線路進行了算法確認,在一定程度上保護了線路自身系統的安全,以尋找最優解的方式加強了測距的嚴謹性,進一步提升測距的數據準確性與科學性,將線路進行分層操作,按照層級尋找最佳操作方式,提高測距的準確率。

圖5 測距準確率對比圖
在以后的實驗中,隨著實驗時間的不斷增加,文中研究的測距準確率不斷提升,且一直位于傳統研究之上。除以上原因外,文中利用雙相位相量對故障進行精準分析,根據雙端阻抗法提升研究的力度,完善測距步驟,提升研究的測距準確率。
經過以上對比分析可知,文中基于多旋翼無人機的輸配電線路故障精確測距研究的故障圖像信號接收效果及測距準確率均優于傳統研究,在較高程度上提升了系統的測距能力,降低了研究成本,提高了測距效率,進一步保護了自身系統,能夠更好地為使用者服務。
5 結束語
文中在傳統研究方法的基礎上提出了一種新式基于多旋翼無人機的輸配電線路故障精確測距研究,該研究的效果明顯優于傳統研究。
文中對輸配電線路的測距研究分為3 個較為清晰的步驟:首先將輸配電線路的圖像數據進行系統收集,利用紫外成像儀對圖像進行記錄操作,并分析獲取圖像的具體線路信息,在了解信息的基礎上進一步提升對線路故障的確認能力,利用模擬退火粒子群算法,將線路故障系統最優解進行合理計算與分解,并將所得結果進行最終實驗研究,通過μPMU相量加大對線路的測距力度,提升測距的結果精準性,完成整體輸配電線路精準測距研究。
相較于傳統研究方法,文中研究方法在較高程度上提高了測距系統的測距準確性,減少無關因素的干擾,進一步完善了輸配電線路的電流平衡性,有利于后續研究的開展,具備更加廣闊的發展市場。
猜你喜歡
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
科技傳播(2019年22期)2020-01-14 03:06:54
汽車維修與保養(2019年7期)2020-01-06 03:30:42
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
汽車維護與修理(2016年10期)2016-07-10 08:17:41
海峽科技與產業(2016年3期)2016-05-17 04:32:12
