基于駕駛特性的ACC系統(tǒng)安全間距策略研究
2021-07-11 19:42:03施衛(wèi)萬(wàn)廣軒劉斌
智能計(jì)算機(jī)與應(yīng)用 2021年1期
施衛(wèi) 萬(wàn)廣軒 劉斌

摘?要:為自適應(yīng)巡航控制系統(tǒng)(ACC)提出一種基于駕駛特性的行車(chē)安全間距策略,在分析對(duì)比現(xiàn)行CTH和VTH算法各自的優(yōu)劣后,考慮駕駛員動(dòng)態(tài)跟車(chē)特性,以此為基礎(chǔ)對(duì)VTH算法進(jìn)行改進(jìn)設(shè)計(jì)。在Matlab/Simulink和Carsim聯(lián)合仿真平臺(tái)下使用經(jīng)典PID控制算法設(shè)計(jì)的ACC系統(tǒng)上層控制器對(duì)CTH、VTH及本文改進(jìn)VTH策略進(jìn)行穩(wěn)態(tài)波動(dòng)速度、急加/減速、恒定車(chē)速的復(fù)合工況仿真對(duì)比。結(jié)果表明,基于駕駛特性設(shè)計(jì)的改進(jìn)VTH能夠在傳統(tǒng)VTH及CTH之間獲取良好的平衡性能,既能對(duì)前車(chē)速度激變做出快速響應(yīng),也能以平滑且較低的加速度跟蹤期望加速度,保證舒適性。
關(guān)鍵詞: 自適應(yīng)巡航控制系統(tǒng);動(dòng)態(tài)駕駛特性;可變車(chē)頭時(shí)距策略;期望安全間距
文章編號(hào): 2095-2163(2021)01-0156-05 中圖分類(lèi)號(hào):U461.91 文獻(xiàn)標(biāo)志碼:A
【Abstract】This paper proposes a safe driving distance strategy based on driving characteristics for the design of the ACC system. After analyzing and comparing the respective pros and cons of the current CTH and VTH algorithms, considering the driver's dynamic following characteristics, the design of VTH algorithm is improved. Under the Matlab/Simulink and Carsim co-simulation platform, the upper-level controller of the ACC system designed by the classic PID control algorithm is used to focus on CTH, VTH, and the improved VTH in this paper to simulate the compound operating conditions of steady-state fluctuating speed, rapid acceleration/deceleration, and constant vehicle speed. The results show that the improved VTH designed in this paper can obtain a good balance performance between the traditional VTH and CTH. It can not only respond quickly to the sudden changes in the speed of the preceding vehicle, but also track the expected acceleration with a smooth and low acceleration to ensure comfort.
【Key words】Adaptive Cruise Control system; dynamic driving characteristics; VTH; expected safe spacing
0 引?言
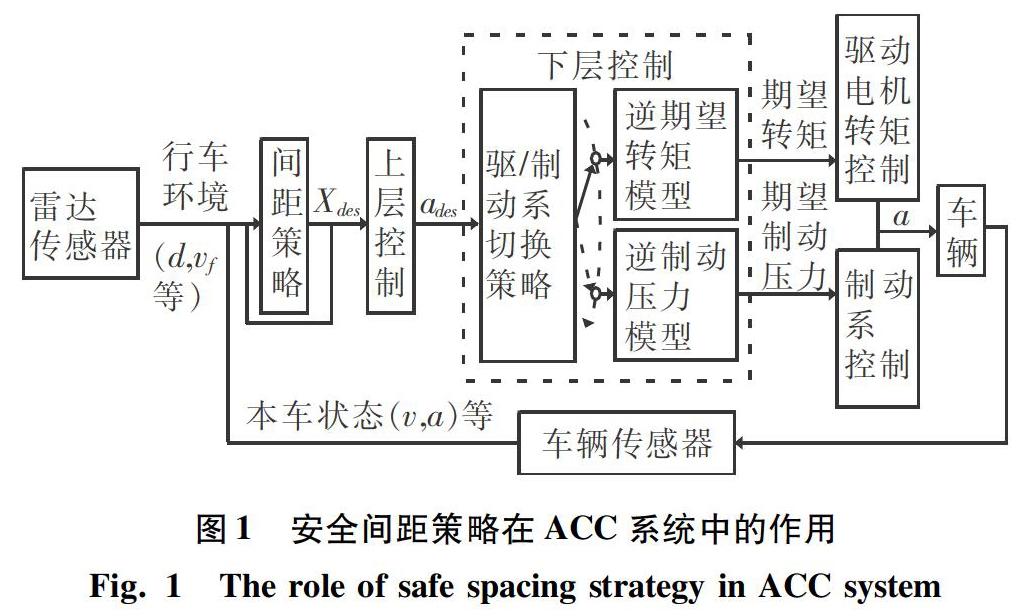
行車(chē)安全間距策略對(duì)自適應(yīng)巡航控制系統(tǒng)(ACC)十分重要,任何ACC系統(tǒng)的開(kāi)發(fā)都是從間距策略的選擇和設(shè)計(jì)開(kāi)始[1],如圖1所示。間距策略指的是連續(xù)兩輛車(chē)之間的理想穩(wěn)態(tài)距離,其選擇和設(shè)計(jì)決定了在整個(gè)跟車(chē)模式中ACC的表現(xiàn)。在跟車(chē)模式工作時(shí),行車(chē)安全間距策略根據(jù)傳感器獲取數(shù)據(jù)信息實(shí)時(shí)計(jì)算行車(chē)期望安全間距,安全間距過(guò)小會(huì)導(dǎo)致ACC車(chē)輛與跟車(chē)目標(biāo)處于不安全狀態(tài),使駕駛員無(wú)法處理突發(fā)狀況,精神緊繃,而過(guò)大的安全距離則會(huì)導(dǎo)致相鄰車(chē)道的頻繁變道,所以合適的行車(chē)安全間距策略是非常重要的。
1 行車(chē)安全間距策略分析
安全間距通常定義為在前車(chē)不可預(yù)測(cè)的行為下避免追尾碰撞的最小間隔[2]。在可變間距策略中,具有代表性的主要有基于車(chē)頭時(shí)距的安全間距策略以及仿人間距策略(Human Factor Distance ,HFD),車(chē)頭時(shí)距指的是在同一車(chē)道上行駛的車(chē)輛隊(duì)列中,兩連續(xù)車(chē)輛車(chē)頭端部通過(guò)某一斷面的時(shí)間間隔[3]。其中,基于車(chē)頭時(shí)距的間距策略又可分為恒定車(chē)頭時(shí)距(Constant Time Headway,CTH)策略和可變車(chē)頭時(shí)距(Variable Time Headway,VTH)策略。
1.1 恒定車(chē)頭時(shí)距策略(CTH)
最早起源于微觀駕駛員行為提出的安全距離模型[4]:
其中,vf,vp分別表示自車(chē)和前車(chē)速度;λ1為車(chē)輛最大制動(dòng)能力決定的參數(shù);th為恒定車(chē)頭時(shí)距,一般取值為1.5~2.8 s;dmin通常包括一個(gè)車(chē)身長(zhǎng)度及車(chē)間最小距離,一般取值為4~6 m。因ACC車(chē)輛行駛過(guò)程中,前后車(chē)呈緊隨狀態(tài),速度差異不大,將λ1(v2f-v2p)去除后簡(jiǎn)化可得:
分析式(2)可知,行車(chē)安全間距與自車(chē)車(chē)速成正比,其比值即為車(chē)頭時(shí)距th,當(dāng)車(chē)速越大,行車(chē)安全距離以正比例增益加大,用以避免因車(chē)速增加而同樣大幅增加的剎車(chē)距離而導(dǎo)致的碰撞。但該模型假設(shè)車(chē)輛在制動(dòng)機(jī)動(dòng)的過(guò)程中具有相同且恒定的減速度,這種假設(shè)產(chǎn)生的解決方案可獲得很高的減速度值,因此舒適度較低。
1.2 可變車(chē)頭時(shí)距策略(VTH)
與CTH不同的是,在VTH策略中,th不再保持不變,而是隨著周?chē)沫h(huán)境進(jìn)行著相應(yīng)的變化。Broqua[5]認(rèn)為車(chē)頭時(shí)距應(yīng)與車(chē)速呈正增益關(guān)系,以此突出自車(chē)車(chē)速在行車(chē)安全距離模型中的重要性。具體公式可寫(xiě)為:
其中,λ2,λ3為參數(shù),僅與自車(chē)車(chē)速相關(guān),成正比例關(guān)系。
Yanakiev等人[6]認(rèn)為還應(yīng)注重前車(chē)車(chē)速在行車(chē)安全距離模型中的作用,具體公式可寫(xiě)為:
其中,vrel表示相對(duì)速度,vrel=vf-vp;t0,iv?為大于0的常數(shù)。
通過(guò)分析可知,上述策略在行車(chē)安全距離模型中考慮因素過(guò)于單一,當(dāng)前車(chē)處于穩(wěn)態(tài)駕駛過(guò)程中,還能得到較好的控制效果,但前車(chē)進(jìn)行變加/減速行駛或頻繁變速時(shí),控制效果就不盡理想。
上海海事大學(xué)羅莉華在車(chē)頭時(shí)距的計(jì)算中,引入前車(chē)加速度擾動(dòng)代表前車(chē)速度的未來(lái)變化趨勢(shì)[7],得到如下形式:
其中,t0,iv,ia表示大于0的參數(shù),ap表示前車(chē)加速度,研究推得其公式為:
為保證車(chē)頭時(shí)距非負(fù)(確保安全性)且盡量節(jié)省交通流量,引入飽和函數(shù)后可得:
其中,sat(·)為飽和函數(shù);thmax為車(chē)頭時(shí)距上限值;thmin為車(chē)頭時(shí)距下限值。
2 行車(chē)安全間距策略算法設(shè)計(jì)
通過(guò)對(duì)已有CTH和VTH策略算法分析可知,行車(chē)安全距離算法雖然并不復(fù)雜、計(jì)算量小,但其本身即存在著矛盾性,道路容量與車(chē)速成正比、與車(chē)間距離成反比,過(guò)多地減少車(chē)速和加大車(chē)間距離會(huì)導(dǎo)致交通效率的降低[8],安全性要求需要與前車(chē)保持足夠的間距,但過(guò)大的車(chē)間距離則會(huì)導(dǎo)致交通流量的浪費(fèi),以及可能更易致使其他車(chē)道車(chē)輛切入。故行車(chē)安全距離模型必須兼顧行車(chē)安全和道路交通效率兩方面。CTH被證明在諸多復(fù)雜的形式環(huán)境下表現(xiàn)不盡理想[9],而VTH策略在多名研究人員考慮不同因素的情況下所得出的行車(chē)安全距離算法也并不相同。本研究在上述分析的基礎(chǔ)上,基于駕駛員跟車(chē)特性在常規(guī)VTH策略的基礎(chǔ)上進(jìn)行改進(jìn)。
在實(shí)際駕駛過(guò)程中,行車(chē)安全距離不僅與自車(chē)車(chē)速相關(guān),同時(shí)還與相對(duì)車(chē)速有密切的關(guān)聯(lián),因此需要在安全間距策略中考慮駕駛員的動(dòng)態(tài)跟車(chē)特性[10]。
有加速度-位移公式:
由公式(8)可得行駛車(chē)輛以恒定減速度a從vx減速到0行駛過(guò)的距離為:
假設(shè)目前自車(chē)速度為vf?m/s,前車(chē)速度為vp,兩車(chē)都以相同的減速度進(jìn)行制動(dòng),減速度常數(shù)為ac,則可得兩車(chē)的制動(dòng)距離:
其中,sf,sp分別表示自車(chē)和前車(chē)的制動(dòng)到靜止時(shí)行駛過(guò)的距離。
改進(jìn)VTH策略示意如圖2所示。當(dāng)vp 則安全間距策略為: 但ACC系統(tǒng)大多數(shù)情況工作在穩(wěn)定車(chē)流中,仿真結(jié)果顯示這種考慮極端剎停工況的策略會(huì)對(duì)相對(duì)車(chē)速過(guò)于敏感,易造成交通流量的浪費(fèi),致使旁側(cè)車(chē)道車(chē)輛切入工況增多。因此在該小節(jié)討論的基礎(chǔ)上對(duì)s進(jìn)行改動(dòng),弱化其對(duì)相對(duì)車(chē)速的敏銳度,找到相對(duì)合適的平衡點(diǎn),提出基于駕駛員動(dòng)態(tài)跟車(chē)特性的VTH安全間距策略為: 其中,th表示車(chē)頭時(shí)距;ac表示制動(dòng)模型中減速度常數(shù),取3m/s2;cv表示可變車(chē)頭時(shí)距計(jì)算公式的常參數(shù),經(jīng)仿真比較取0.05;dmin表示最小安全距離,取6m。t0表示恒定車(chē)頭時(shí)距值,文獻(xiàn)[11]通過(guò)對(duì)交通流的實(shí)測(cè)分析將駕駛狀態(tài)分為強(qiáng)跟馳狀態(tài)和弱跟馳狀態(tài),這二者代表的最短車(chē)頭時(shí)距和舒適車(chē)頭時(shí)距分別滿足以1.55s和2.60s為均值,以0.48s和1.13s為標(biāo)準(zhǔn)差的正態(tài)分布,其中舒適車(chē)頭時(shí)距中包含了約1s的駕駛員心理裕值。綜合考慮交通流量及安全性,車(chē)頭時(shí)距取1.7s。 3 改進(jìn)VTH的復(fù)合工況仿真分析驗(yàn)證 為驗(yàn)證本文提出的基于駕駛員跟車(chē)特性的改進(jìn)VTH策略,采用經(jīng)典PID算法設(shè)計(jì)上層控制器,Matlab/Simulink及Carsim搭建的聯(lián)合仿真平臺(tái)如圖3所示,在該平臺(tái)上進(jìn)行復(fù)合工況仿真。并與式(2)所描述的恒定車(chē)頭時(shí)距策略(CTH)、式(5)描述的可變車(chē)頭時(shí)距(VTH)策略進(jìn)行仿真結(jié)果對(duì)比。 文中采用穩(wěn)態(tài)跟車(chē)小幅速度波動(dòng)、急減速、急加速三種工況組成的復(fù)合工況對(duì)安全間距策略進(jìn)行仿真實(shí)驗(yàn)。具體仿真實(shí)驗(yàn)設(shè)置為:仿真時(shí)長(zhǎng)25s,前后車(chē)初始速度為20m/s、18m/s,初始間距40m;前車(chē)0~10s為近似穩(wěn)態(tài)行駛,速度在20m/s左右小幅波動(dòng),10~15s為急減速工況,加速度為-1.6m/s2,15~20s為恒定車(chē)速行駛,20~25s為急加速工況,加速度為2m/s2。對(duì)各種狀況下的實(shí)驗(yàn)結(jié)果可做闡釋分述如下。 (1)0~10s的穩(wěn)態(tài)小幅波動(dòng)工況。該場(chǎng)景為ACC系統(tǒng)的主要工作場(chǎng)景,主要能夠考察安全間距策略對(duì)ACC車(chē)輛速度和間距的跟蹤能力。期望安全間距響應(yīng)曲線見(jiàn)圖4。由圖4分析可知,因?yàn)槌跏架?chē)速前車(chē)大于后車(chē),因此3種策略都采取了加速動(dòng)作,伴隨著前車(chē)的小幅減加速波動(dòng),這三種策略下的ACC車(chē)輛隨即采取相應(yīng)的減加速動(dòng)作以跟隨前車(chē)的速度變化。加速度響應(yīng)曲線如圖5所示。由圖5分析可知,相較于該仿真中CTH策略,改進(jìn)VTH對(duì)相對(duì)車(chē)速的變化具有更快的響應(yīng)速度,由于前車(chē)的小幅減速變化,改進(jìn)VTH在進(jìn)行1.24s 處開(kāi)始減速,而VTH和CTH分別為1.08s和1.58s,雖沒(méi)有VTH響應(yīng)速度更快,但卻獲取了更小的加減速度波動(dòng),不會(huì)因較小的相對(duì)車(chē)速變化而像VTH那樣過(guò)度調(diào)節(jié)。進(jìn)而得到,速度響應(yīng)曲線如圖6所示。圖6中,自車(chē)速度響應(yīng)曲線相較CTH與VTH更加平滑,同樣體現(xiàn)了該改進(jìn)VTH的優(yōu)越性。 (2)10~15s、20~25s的急減/加速工況。這兩種場(chǎng)景主要考察改進(jìn)VTH策略對(duì)前車(chē)速度快速變化的響應(yīng)能力以及跟蹤能力,確保行車(chē)安全性。顯然由圖4可看出,當(dāng)前車(chē)進(jìn)行急減速時(shí),改進(jìn)VTH最先響應(yīng)并減少相應(yīng)的期望安全間距,且兩車(chē)間實(shí)際間距響應(yīng)曲線如圖7所示。在圖7中可知,自車(chē)加速度以較為平滑的減速度進(jìn)行制動(dòng),而VTH的加速度變化較為突兀,會(huì)影響乘坐舒適度。 (3)15~20 s的恒定速度工況。該場(chǎng)景主要用于考察改進(jìn)VTH策略對(duì)于加速度階躍變化的響應(yīng)能力。由圖7中可知,伴隨著減速度由1.6 m/s2突然轉(zhuǎn)變?yōu)? m/s2,VTH因?yàn)榍败?chē)加速度ap的階躍變化,產(chǎn)生了階躍振蕩,該情況同樣也發(fā)生在20 s處工況由恒定速度工況轉(zhuǎn)換至以加速度2 m/s2加速工況處。相比之下改進(jìn)VTH能夠以平滑的曲線進(jìn)行過(guò)渡,而CTH因?yàn)橹慌cvf相關(guān),因此,相較其它兩種策略表現(xiàn)出了一定的遲滯性。 4 結(jié)束語(yǔ) 上述仿真實(shí)驗(yàn)中,3種安全間距策略都能夠完成最基本的跟車(chē)及安全性保障,但文獻(xiàn)[4]中CTH策略因只考慮自車(chē)速度vf變化,過(guò)于保守,對(duì)于速度激變等場(chǎng)景難以適應(yīng),而文獻(xiàn)[7]中VTH策略則將前車(chē)加速度ap作為擾動(dòng),雖能獲取較好的速度激變響應(yīng),但卻放棄了部分乘坐舒適性。相較之下,改進(jìn)VTH在上述兩者間獲取了良好的平衡性,即能對(duì)前車(chē)速度激變做出快速的響應(yīng)保證安全性,也能夠以平滑且較低的加速度跟蹤期望安全間距,保證舒適性。 參考文獻(xiàn) [1]RAJAMANI R. Vehicle dynamics and control[M]. 2nd ed. US:Springer,2012. [2]DARBHA S, HEDRICK J K, CHIEN C C, et al. A comparision of spacing and headway control laws for automatically controlled vehicles[J]. Vehicle System Dynamics, 1994,23(1):597-625. [3]VOGEL K . A comparison of headway and time to collision as safety indicators[J]. Accident Analysis and Prevention, 2003, 35(3):427-433. [4]BRACKSTONE M, MCDONALD M . Car-following: A historical review[J]. Transportation Research Part F Traffic Psychology & Behaviour, 1999, 2(4):181-196. [5]BROQUA F. Cooperative driving : Basic concepts and a first assessment of "intelligent cruise control" strategies[C]// Drive Conference Advanced Telematics in Road Transport. Amsterdam:Elsevier, 1991:908-929. [6]YANAKIEV D, KANELLAKOPOULOS I . Nonlinear spacing policies for automated heavy-duty vehicles[J]. IEEE Transactions on Vehicular Technology, 1998, 47(4):1365-1377. [7]羅莉華. 車(chē)輛自適應(yīng)巡航系統(tǒng)的控制策略研究[M]. 上海:上海交通大學(xué)出版社, 2013. [8]侯德藻. 汽車(chē)縱向主動(dòng)避撞系統(tǒng)的研究[D]. 北京:清華大學(xué),2004. [9]CHIANG Y H, JUANG J C . Longitudinal vehicle control with the spacing policy in consideration of brake input limits[C]// Proceedings of the IEEE International Conference on Systems, Mans and Cybernetics. Montreal, Canada: IEEE, 2007. [10]袁偉, 付銳, 馬勇, 等. 基于高速實(shí)車(chē)駕駛數(shù)據(jù)的駕駛?cè)烁?chē)模型研究[J]. 汽車(chē)工程, 2015, 37(6):679-685. [11]孟凡興,張良,張偉. 駕駛員車(chē)頭時(shí)距研究[J]. 工業(yè)工程與管理,2013,18(2):131-135,140.
