傾斜攝影測量與機(jī)載LiDAR點(diǎn)云融合在三維建模中的應(yīng)用
2021-07-12 03:59:22賀丹
城市勘測 2021年3期
賀丹
(重慶市勘測院,重慶 401121)
1 引 言
傾斜攝影技術(shù)可以得到更逼真的實(shí)景三維模型,同時(shí)減少人工操作的步驟,是目前三維建模的主流趨勢[1~3]。但是通過傾斜攝影測量得到的三維模型,受數(shù)據(jù)采集設(shè)備、時(shí)空天氣環(huán)境及數(shù)據(jù)處理算法的影響,其成果會(huì)存在一定的畸變和錯(cuò)誤,不利于更進(jìn)一步的應(yīng)用,目前造成模型畸變的主要原因有以下幾個(gè)方面:①飛行器姿態(tài)變化引起的誤差;②大氣環(huán)境噪聲誤差;③受相片分辨率影響導(dǎo)致同名點(diǎn)匹配誤差。造成模型畸變和缺陷的原因復(fù)雜多樣,這也是目前基于傾斜攝影測量進(jìn)行三維重建面臨的最普遍的問題[4]。對于單體建筑物,可以通過人機(jī)交互的方式進(jìn)行優(yōu)化,但在大場景下,手動(dòng)優(yōu)化的方式就會(huì)降低模型生產(chǎn)的效率。
LiDAR具有分辨率高、抗干擾能力強(qiáng)等特點(diǎn)[5]。利用這些優(yōu)點(diǎn)來輔助傾斜攝影測量數(shù)據(jù)進(jìn)行融合建模,可以提高模型精度。隨著LiDAR技術(shù)的進(jìn)步,越來越多的學(xué)者開始研究利用LiDAR點(diǎn)云進(jìn)行三維模型重建的技術(shù)[6]。張平等[7]通過無人機(jī)傾斜攝影和地面擺站激光掃描相結(jié)合,有效改善了傾斜攝影模型的建模效果,但地面激光掃描儀需要搬站,工作量較煩瑣。王丹陽等[8]利用LiDAR進(jìn)行建筑物三維建模,獲取到了較高精度的三維模型,但在大場景下該方法效率偏低。
利用傾斜攝影測量和LiDAR點(diǎn)云各自的優(yōu)點(diǎn)和特性(表1),本文設(shè)計(jì)了一種融合傾斜攝影與LiDAR點(diǎn)云的三維建模方法,通過以傾斜攝影為主,激光雷達(dá)為輔的方式,在ContextCapture軟件中對二者進(jìn)行融合建模,從而實(shí)現(xiàn)提高三維模型精度的目的。經(jīng)實(shí)驗(yàn),該方法在應(yīng)用于城市復(fù)雜環(huán)境時(shí)可以取得較理想的效果。

三維建模方法優(yōu)缺點(diǎn)對比 表1
2 傾斜攝影與LiDAR點(diǎn)云融合建模
2.1 基于ContextCapture的傾斜攝影建模流程
ContextCapture是一款基于圖形運(yùn)算單元GPU的快速三維場景運(yùn)算軟件,國內(nèi)有多家重要的數(shù)據(jù)生產(chǎn)單位正在使用該軟件[9]。使用ContextCapture軟件進(jìn)行三維建模的整體流程如圖1所示。

圖1 ContextCapture常規(guī)建模流程
通過上述流程得到的三維模型較粗糙,通常建筑物會(huì)由于氣候條件、拍攝距離、航高、分辨率等原因產(chǎn)生不同程度的屋頂凸包、立面缺失等問題,將LiDAR點(diǎn)云與傾斜攝影成果進(jìn)行融合建模,可以有效地彌補(bǔ)傾斜攝影模型的這些缺點(diǎn),提高精度。
2.2 融合建模流程
首先按照常規(guī)流程在ContextCapture軟件中進(jìn)行傾斜攝影數(shù)據(jù)的解算,構(gòu)建空三工程后,再處理LiDAR點(diǎn)云數(shù)據(jù)。由于LiDAR點(diǎn)云與傾斜攝影測量的采集時(shí)間、數(shù)據(jù)獲取平臺(tái)、坐標(biāo)系統(tǒng)通常都不一樣,所以要先將數(shù)據(jù)進(jìn)行配準(zhǔn),然后進(jìn)行第二次空三解算,最后生成融合后的三維模型即可,整個(gè)融合建模的流程如圖2所示。
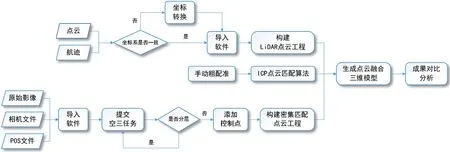
圖2 基于ContextCapture的多源數(shù)據(jù)融合建模流程
2.3 數(shù)據(jù)采集及處理
傾斜攝影測區(qū)共2.32 km2,數(shù)據(jù)采集設(shè)定航高 150 m,航向重疊度為75%,旁向重疊度為65%,進(jìn)行固定航線采集,采集并處理后結(jié)果如圖3(a)所示;機(jī)載LiDAR測區(qū)共 0.86 km2,數(shù)據(jù)采集設(shè)定航高 200 m,航線帶寬 120 m,飛行速度 10 m/s,采集并處理后結(jié)果如圖3(b)所示。

圖3 數(shù)據(jù)采集及處理結(jié)果
根據(jù)POS文件來對原始相片進(jìn)行處理,首先要根據(jù)相片參數(shù)和相機(jī)參數(shù)來編輯POS文件,POS文件中包括了相片名、經(jīng)緯度和高程四項(xiàng)數(shù)據(jù),將經(jīng)緯度和高程數(shù)據(jù)投影到目標(biāo)平面坐標(biāo)系上,得到一個(gè)相片名與XYZ坐標(biāo)一一對應(yīng)關(guān)聯(lián)的POS文件。通過軟件,將POS文件與航攝相片進(jìn)行空三解算,進(jìn)而通過密集匹配來匹配同名點(diǎn),從而得到整個(gè)測區(qū)的密集匹配點(diǎn)云。處理LiDAR點(diǎn)云時(shí),要先檢查LiDAR點(diǎn)云與采集點(diǎn)云數(shù)據(jù)時(shí)的航跡數(shù)據(jù)的坐標(biāo)系的一致性,若坐標(biāo)系不一致則要先進(jìn)行坐標(biāo)轉(zhuǎn)換,待航跡和點(diǎn)云坐標(biāo)系匹配后,再導(dǎo)入ContextCapture軟件中進(jìn)行LiDAR點(diǎn)云與空三工程的配準(zhǔn)。
2.4 三維融合建模與分析
將LiDAR點(diǎn)云數(shù)據(jù)與傾斜攝影數(shù)據(jù)進(jìn)行配準(zhǔn),并將配準(zhǔn)后的數(shù)據(jù)導(dǎo)入ContextCapture軟件中,通過ContextCapture軟件中的Merge blocks功能,將兩組數(shù)據(jù)進(jìn)行融合,然后再次提交空三解算任務(wù)。此時(shí),LiDAR點(diǎn)云將會(huì)和傾斜攝影密集匹配點(diǎn)云同步解算,待空三任務(wù)完成后,得到融合后目標(biāo)測區(qū)的實(shí)景三維模型,如圖4所示,左圖為LiDAR點(diǎn)云和密集匹配點(diǎn)云融合后的效果,右圖為融合后的實(shí)景三維模型成果。

圖4 點(diǎn)云融合后空三工程(左)與融合后三維模型(右)
將融合后的模型與傾斜攝影模型對比,可以看出凸包扭曲變形等問題都得到了較明顯的改善。因?yàn)樵跓o紋理的狀態(tài)下能更清楚地觀察模型的幾何結(jié)構(gòu),所以使用白模進(jìn)行對比。圖5為測區(qū)內(nèi)的一棟建筑,融合LiDAR數(shù)據(jù)后,其頂部原有的凸包和凹陷部分變得較為平整,屋頂細(xì)節(jié)得到了改善。圖6為測區(qū)內(nèi)的另一棟建筑,對比融合前后的模型,融合后的模型精度有了較大的提升,大部分凹陷被修復(fù),頂部邊緣的一些鋸齒狀凸起也得到了平滑,屋頂?shù)慕Y(jié)構(gòu)更加接近真實(shí)狀態(tài)。通過TIN格網(wǎng)的構(gòu)建細(xì)節(jié),發(fā)現(xiàn)融合LiDAR點(diǎn)云后,其構(gòu)網(wǎng)密度更密集,另外由于LiDAR點(diǎn)云本身分辨率高、數(shù)據(jù)坐標(biāo)精確,所以模型的精度得到了較明顯的提升。綜上,傾斜攝影與LiDAR點(diǎn)云融合可以有效提升實(shí)景三維模型的精度,修復(fù)模型的漏洞,優(yōu)化模型的細(xì)節(jié),能夠明顯提升傾斜攝影模型的精細(xì)度。

圖5 建筑物屋頂凸包問題的改善

圖6 建筑物屋頂其他問題的改善
3 融合建模精度
相對于傳統(tǒng)測繪,傾斜攝影測量是一門較新的技術(shù),而三維模型的應(yīng)用更是近年來才轉(zhuǎn)向市場。所以直至目前,三維模型的質(zhì)量評定方式還沒有形成一個(gè)較完善的技術(shù)規(guī)范和標(biāo)準(zhǔn),一些專家、學(xué)者、研究人員也正在努力推動(dòng)技術(shù)規(guī)范的形成。宮巖[11]以傳統(tǒng)手工三維模型質(zhì)檢標(biāo)準(zhǔn)為基礎(chǔ),結(jié)合實(shí)景三維模型的特點(diǎn),總結(jié)出實(shí)景三維模型數(shù)據(jù)檢查方法。張?zhí)柕萚12]通過分析傾斜攝影實(shí)景三維模型的特點(diǎn)和成果質(zhì)量表現(xiàn)形式,歸納了常規(guī)數(shù)據(jù)質(zhì)量評定的內(nèi)容和方法,為實(shí)景三維模型質(zhì)量評價(jià)相關(guān)標(biāo)準(zhǔn)的制定提供了一些思路。
如表2所示,實(shí)景三維模型質(zhì)量評價(jià)元素主要可以參考空間參考系、位置精度、模型質(zhì)量、場景效果、附件質(zhì)量等幾個(gè)方面來進(jìn)行。根據(jù)上述評定元素,對融合建模成果進(jìn)行質(zhì)量評定:①空間參考系:模型的坐標(biāo)系為重慶獨(dú)立坐標(biāo)系中帶,符合要求。②位置精度:通過控制點(diǎn)坐標(biāo)檢查模型的位置精度,中誤差為 0.042 m。③模型質(zhì)量:融合建模解決了大部分建筑物出現(xiàn)的立面缺失、空洞,屋頂凸包、變形等問題。④場景效果:融合建模的場景更加精細(xì),與真實(shí)場景更加接近。⑤附件質(zhì)量:附件質(zhì)量包括數(shù)據(jù)采集設(shè)備、采集外部條件的基本記錄文檔,符合要求。

實(shí)景三維模型精度評定的主要元素 表2
4 結(jié) 語
本文從實(shí)際應(yīng)用的角度出發(fā),討論了常用的實(shí)景三維建模軟件存在的一些問題,設(shè)計(jì)了一種基于ContextCapture軟件的傾斜攝影與LiDAR點(diǎn)云融合建模方法,研究了該方法對于提高模型質(zhì)量的優(yōu)勢,并結(jié)合目前主流的精度評定元素對模型精度做出了定性的評價(jià)。實(shí)驗(yàn)表明,傾斜攝影與LiDAR點(diǎn)云融合建模,可以有效提高實(shí)景三維模型的精度,解決傾斜攝影模型的空洞、凸包、扭曲等重大問題,彌補(bǔ)傾斜攝影測量的部分缺陷,優(yōu)化了模型的紋理和細(xì)節(jié),為三維模型的可量可算提供更可靠的數(shù)據(jù)基礎(chǔ)。但是,LiDAR數(shù)據(jù)的采集成本較高,在使用時(shí)需要考慮經(jīng)費(fèi)問題,而且進(jìn)行配準(zhǔn)和點(diǎn)云融合的耗時(shí)也會(huì)隨著數(shù)據(jù)量的增加而上升,所以數(shù)據(jù)采集利用的方式和點(diǎn)云融合的方法需要更進(jìn)一步的研究。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
今日農(nóng)業(yè)(2021年19期)2022-01-12 06:16:36
中學(xué)生數(shù)理化·八年級物理人教版(2021年12期)2021-12-31 03:23:08
中老年保健(2021年11期)2021-08-22 03:15:44
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年1期)2021-03-19 08:28:38
中學(xué)生數(shù)理化·中考版(2020年10期)2020-11-27 01:59:48
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
現(xiàn)代出版(2020年3期)2020-06-20 07:10:34
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
中國生殖健康(2019年2期)2019-08-23 08:12:08
