免像控無人機在應急測繪中的應用
2021-07-12 03:32:26侯紅科周廣華
城市勘測 2021年3期
侯紅科,周廣華
(廣州市城市規劃勘測設計研究院,廣東 廣州 510060)
1 引 言
2020年入汛以來,南方地區發生多輪強降雨天氣,造成了多地嚴重洪澇災害。在災害面前,如何快速獲取災區影像等地理信息數據顯得尤為重要。應急測繪保障的目的就是應對突發自然災害、事故災難、公共衛生事件等突發事件,快速有序地提供基礎地理信息數據等測繪成果,為突發事件的預防、應對、處置和恢復全過程提供數據支撐[1]。
近年來,GNSS技術的發展,提高了無人機定位的精度和影像數據處理效率[2,3]。趙政、常越等人[4,5]通過利用自帶的POS數據對傾斜影像進行影像水平糾正,自動獲取同名像點,為多視影像平差提供可靠的連接點。范秀慶等人[6~8]進行了無人機免像控技術在地形圖測量中的可行性研究,研究表明免像控無人機在連續衛星運行參考站(CORS系統)和慣性測量單元(IMU)的支持下,可直接獲取無人機的空間位置參數和側滾角等姿態參數,經過對系統誤差的檢校,得到高精度的初始化外方位元素,從而實現免像控作業。在災害影響下,因交通暫時中斷會導致救援隊伍無法快速進入災區。而無人機免像控技術對場地要求較低,能快速獲取有效的地理信息數據。因此無人機技術在處置各種突發事件過程中具有獨特的優勢。
2 無人機航測系統介紹
本次演練采用四旋翼無人機航攝遙感系統(如圖1所示),主要包括飛行平臺、五鏡頭傾斜攝影系統和飛行規劃系統。

圖1 無人機航攝遙感系統
2.1 飛行平臺
無人機采用的是大疆經緯M300 RTK,它是行業首款具備六向定位避障與可視化飛行輔助界面的無人機,滿足IP45防護等級,支持 55 min超長續航和最遠15公里圖傳距離,具備較強的抗風能力。同時,它采用了雙余度備份IMU和氣壓計,搭載了RTK的雙天線系統,大大提高了定位精度和抗磁干擾能力。其主要參數如表1所示。

經緯M300 RTK主要參數 表1
2.2 五鏡頭傾斜攝影系統
搭載的賽爾五鏡頭傾斜攝影系統下視相機由5臺高度集成的獨立相機組成,其中1臺相機豎直對地拍攝,另外4臺相機以45°傾角同步獲取地物側面紋理。鏡頭焦距均為 35 mm,采用 23.5 mm×15.6 mm CMOS傳感器,影像幅面 6 000 pix×4 000 pix。完全滿足應急測繪和其他航測作業的要求。
2.3 飛行規劃系統
地面遙控器自帶無人機飛行規劃和管理操作系統,它能實時監控無人機的飛行位置、航跡和姿態等數據。通過直觀簡易的交互設計,使用戶輕松規劃復雜的航線任務,實現全自動飛行作業。
3 無人機影像處理方法
無人機影像處理過程主要包括影像預處理、POS數據輔助空中三角測量、影像密集匹配、三維TIN網格構建及實景三維模型生產,其流程如圖2所示。

圖2 無人機影像數據處理流程
3.1 POS數據輔助空中三角測量
無人機通過搭載五鏡頭高分辨率相機,從不同角度獲取了地面影像,采集了地面物體完整的信息。同時獲取曝光點坐標數據(POS數據)、相機參數以及相機之間的相對位置關系。將基于CORS系統獲得的高精度POS數據作為初始值,可建立地攝測量坐標系與像平面坐標系之間的共線方程[9,10],如下所示:
(1)
式中:(x,y)表示像點的像平面坐標;(x0,y0,f)表示影像的內方位元素,在相機生產出來后基本確定,可視為已知值;(X,Y,Z)表示地物點對應于地攝測量坐標系的空間坐標;(XS,YS,ZS)表示航攝中心對應于地攝測量坐標系的空間坐標;(ai,bi,ci)表示旋轉矩陣的方向余弦。將共線方程經過多次求導變換和迭代運算[11],可以計算出影像的外方位元素和連接點的三維坐標。
3.2 多視影像密集匹配
多視影像的密集匹配是尋找連接點來構網的過程,同時可以消除影像數據中的冗余數據[12]。通過低通濾波等技術構建影像金字塔,采用ASIFT等基于平移、旋轉、尺度不變特征的算法,進行多視影像的密集匹配,重建出周圍的空間面片,生成大量高密度點云。
3.3 正射影像生產和三維模型構建
對原始影像勻光勻色處理后,疊加測區DEM,通過數字微分糾正方法可生成單像幅正射影像,然后對所有圖幅進行拼接,得到整個測區正射影像圖。對高密度點云進行抽稀,構建出三維不規則TIN模型,形成地面景物白膜,最后選擇最佳的影像紋理進行映射,構建出實景三維模型[13]。
4 應急演練實例
4.1 演練概況
本次應急保障演練由廣州市規劃和自然資源局組織開展,采取“單盲”方式,不提前通知演練地點,通過突發性來貼近實戰的演練。演練區域位于廣州市白云區太和鎮興太三路口附近。該區域內多山,且附近有居民生活區,在暴雨來臨時,存在山體滑坡等潛在危險。現場情況如圖3所示。
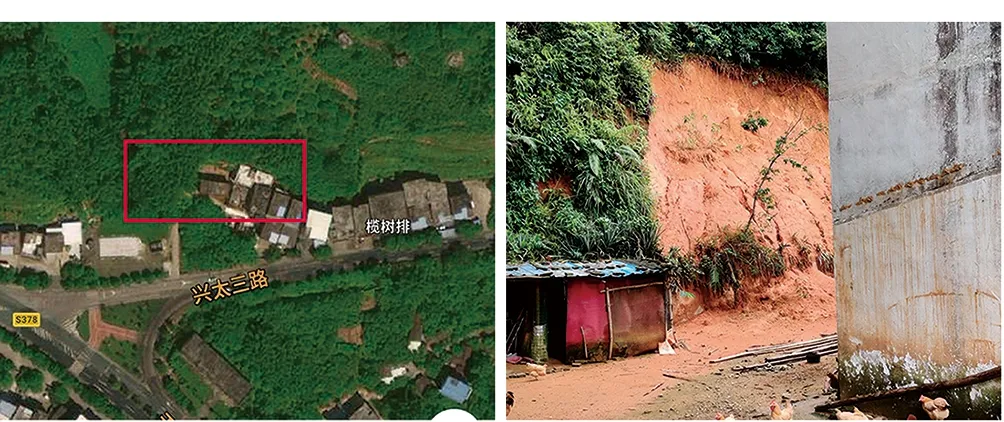
圖3 應急演練區位置及現場情況
4.2 組織實施
到達演練現場后,項目組成員立即進行實地踏勘。同時使用大疆精靈4無人機對現場進行視頻拍攝和高度探測,全方位熟悉現場情況。踏勘完畢后,選取安全區域起飛大疆經緯M300 RTK,開始多角度低空影像數據的采集。外業數據采集工作完成后,根據拍攝的影像數據進行測區范圍內正射影像圖及傾斜攝影三維模型的生產工作。工作流程如圖4所示。

圖4 演練組織實施流程
4.3 質量控制
根據現場實地情況,設置航高150 m,航向重疊度75%,旁向重疊度為75%。航線覆蓋超出測區邊界線不少于兩條基線,旁向覆蓋超出攝影邊界線大于像幅的50%。從而保證了航攝中不出現相對和絕對漏洞,且地面分辨率優于 3 cm。
4.4 成果展示
利用Pix4Dmapper對影像進行快速處理,在 30 min左右生成了正射影像圖,如圖5所示。DOM覆蓋了災害檢測區域,無破洞和拉花等情況發生,質量合格,能夠滿足指揮中心對全局影像的瀏覽。

圖5 演練區域正射影像圖
90 min后,生產出了演練區域的實景三維模型,如圖6所示。三維模型更直觀地反映了現場狀況,有助于指揮中心深入了解災害區域情況。

圖6 實景三維模型
4.5 全過程總結
無人機的正射影像圖和三維模型結果及時上交至指揮中心,宣告了演練結束。本次應急測繪保障演練的全過程時間點如表2所示:

測繪應急保障演練全過程時間點 表2
5 結 論
此次演練活動采取“單盲”方式,未提前通知演練地點,通過突發性來貼近實戰的演練。從接到應急任務,到測繪成果的生成,共花費3個小時,符合應急測繪“時間就是生命”的原則。免像控無人機技術作業效率高,受周圍環境限制較小。通過這次應急演練,證明了免像控無人機技術在自然災害、事故災難、公共衛生事件等應急保障中有較大的應用價值。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
浙江國土資源(2019年10期)2019-10-31 03:17:00
建材發展導向(2019年10期)2019-08-24 06:25:28
江西建材(2018年4期)2018-04-10 12:37:38
中國公共安全(2017年7期)2017-10-13 08:18:11
電子制作(2017年9期)2017-04-17 03:01:00
光學精密工程(2016年6期)2016-11-07 09:07:19
衛星與網絡(2015年12期)2015-10-27 02:21:46
