基于Smart3D的雙鏡頭無人機傾斜攝影大面積實景三維建模研究
2021-07-12 03:59:24敖成歡
城市勘測 2021年3期
關(guān)鍵詞:模型
敖成歡
(貴陽市測繪院,貴州 貴陽 550000)
1 引 言
對于原始傾斜影像的獲取,在劉先林院士等人的帶動下,2010年研制了我國第一臺有人機搭載的傾斜相機SWDC-5[3]。隨后各科研院所、企事業(yè)單位研制了不同的傾斜數(shù)據(jù)獲取平臺,如苑方艷等設(shè)計了兩個擺動鏡頭的傾斜攝影數(shù)據(jù)獲取平臺[4],甚至都出現(xiàn)了消費級大疆無人機。在傾斜原始影像獲取之后的影像匹配技術(shù)上,Zitova B,F(xiàn)lusser J將影像匹配技術(shù)分為特征提取、特征描述、特征匹配、變化矩陣估算和圖像變化5個步驟[5],為影像匹配的技術(shù)提供了明確的研究思路。在影像處理階段為了提高匹配效率構(gòu)建影像金字塔,對縮小同名點的搜索范圍提出核線約束、單位約束和多視匹配等[6~9]。王建強、鐘春惺等研究了基于多視航空影像的城市三維建模[10],朱俊鋒、牛鵬濤等人探究了基于傾斜攝影技術(shù)的城市三維建模[11,12]。謝奇宇、向云飛等人通過LiDAR和傾斜攝影技術(shù)的結(jié)合優(yōu)化城市三維模型的構(gòu)建[13,14]。Super Map、DP molder、EPS、IData等企業(yè)產(chǎn)品將傾斜攝影三維模型結(jié)合不動產(chǎn)登記、地籍測繪、大比例地形圖采集。一系列的研究無疑都是傾斜攝影技術(shù)的不斷推進(jìn)、建模技術(shù)的不斷優(yōu)化和應(yīng)用的不斷拓展。
因無人機具有體積小、便于攜帶等優(yōu)勢,成了傾斜攝影測量數(shù)據(jù)獲取的不二選擇,但因其載重負(fù)荷原因,不能像載人機一樣搭載5鏡頭工業(yè)級高分辨率相機,如果為了減輕質(zhì)量以便搭載于無人機上,則就得壓縮集成傳感器,犧牲了其高分辨率和對光的敏感度等優(yōu)點。也有前視、后視和下視的3鏡頭傾斜攝影,但仍然需要消耗部分動力而縮短續(xù)航能力。本文重點研究探討基于自主研發(fā)的雙鏡頭推掃云臺下的無人機傾斜攝影三維建模。
2 雙鏡頭傾斜相機云臺
對于經(jīng)典的五鏡頭傾斜相機的搭載,市場上有載人機、固定翼無人機以及多旋翼。載人機而言,姿態(tài)穩(wěn)定性好,抗風(fēng)能力強,并且續(xù)航能力也非常強,但是運營維護(hù)成本高、需要專業(yè)的大型起降場地和專業(yè)的飛行員等苛刻條件[15]。而無人機則有易攜帶、易操作和維護(hù)成本低等優(yōu)勢,但是其續(xù)航能力和載荷能力都偏弱,載荷越重,續(xù)航能力就越低,因此,如果為了提高續(xù)航能力,勢必犧牲傳感器固有的優(yōu)點,目前主流的傾斜攝影傳感器搭載體對比如表1所示。
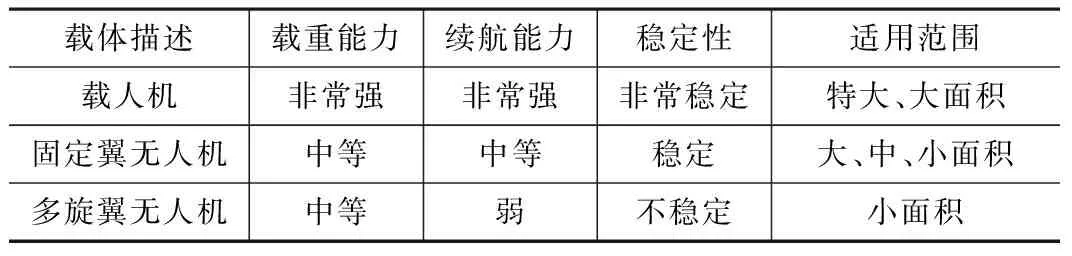
傾斜攝影傳感器搭載平臺比較 表1
基于以上原因,本文自主研發(fā)了針對無人機的雙鏡頭推掃式傾斜攝影傳感器搭載云臺,為獲取豐富的地面紋理信息,在多次實驗失敗的經(jīng)驗中總結(jié)出:
(1)傳感器與鉛垂線方向角度呈固定40°,以便獲取不同高度地面垂直方向的紋理信息。
(2)所搭載的雙鏡頭傳感器必須呈十字交叉,在作業(yè)過程中呈東西或南北向為宜,這樣可以減少地面強光反射和太陽光線折射對影像獲取的質(zhì)量,可以更好地獲取地面水平方向的紋理信息。
如圖1所示是載有雙鏡頭傾斜相機的無人機在空中的作業(yè)概略圖,當(dāng)無人機從固定的規(guī)劃航線飛過時,雙鏡頭傾斜相機可以方便地獲取地面不同方面的紋理信息,從而獲取地面紋理信息豐富的原始影像數(shù)據(jù)。
檢測裝置選用超低功耗的電子元器件,增加檢測裝置的使用時長,本文設(shè)計的檢測裝置的電池電量能夠使用兩年以上。由于檢測裝置安裝在大型機械設(shè)備的吊臂前端,應(yīng)選擇具有良好的抗振動、防水、防老化、耐高溫和便于安裝的外殼結(jié)構(gòu)。檢測裝置的實物圖如圖5所示。
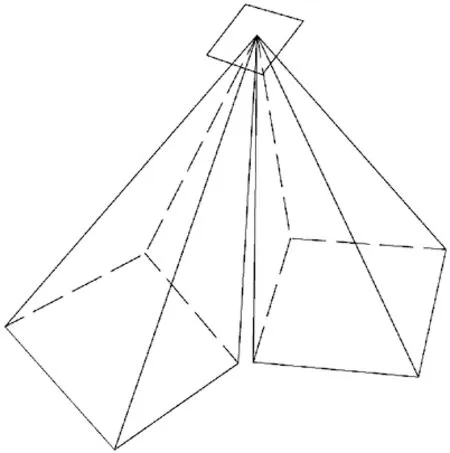
圖1 作業(yè)模式示意圖
3 研究說明
本研究主要針對大面積的無人機傾斜攝影實景三維建模,本文劃定了湖南省岳陽市君山區(qū)的 21.6 km2,研究區(qū)涉及君山區(qū)整個城區(qū),低矮建筑與中高層建筑分布較均,因測區(qū)范圍面積大,也為方便后期對大面積實景三維建模分塊處理接邊問題的研究,本文將整個研究區(qū)進(jìn)行航攝分區(qū),共分為2個子測區(qū),分別進(jìn)行數(shù)據(jù)的獲取。如圖2所示為研究區(qū)域的概圖,藍(lán)色線框為主要航攝數(shù)據(jù)獲取區(qū)域,紅色線框則為2個子區(qū)域航線規(guī)劃范圍。以防研究區(qū)邊上數(shù)據(jù)可能缺失的情況,本文在其基礎(chǔ)上外擴(kuò)3~4條航線如圖2紅線所示。為了更好地實現(xiàn)2個子區(qū)域的接邊,本文對其進(jìn)行了公共數(shù)據(jù)的獲取,如圖2線框重疊部分。

圖2 研究區(qū)概圖
為方便飛行航線的規(guī)劃設(shè)計,這里先介紹數(shù)據(jù)獲取相機,本研究采用SONY黑卡RX1全畫幅CCD相機,傳感器大小為 35.8 mm×23.9 mm,焦距為 35 mm,有效像素為 2 430萬,像幅大小為 6 000×4 000,像元大小為 6 um。實景三維建模軟件采用市場上使用最多的Smart3D軟件,總體作業(yè)流程如圖3所示。
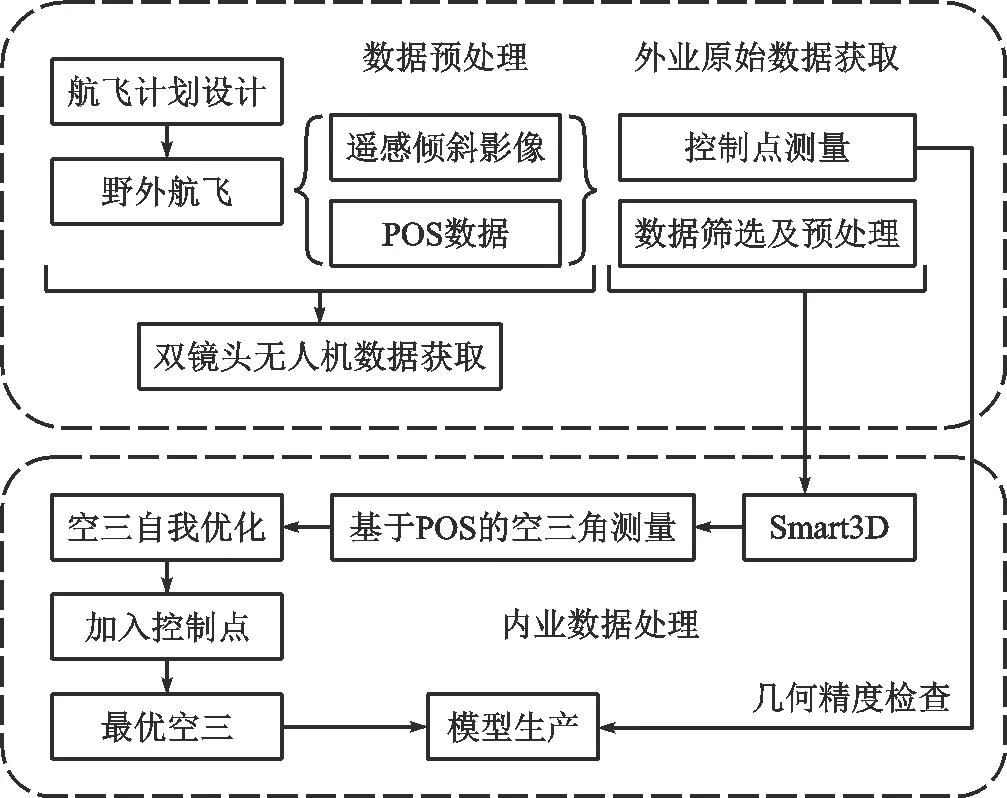
圖3 實驗作業(yè)流程
4 實驗應(yīng)用驗證
4.1 無人機飛行航線的設(shè)計
本研究采用固定翼無人機搭載自主云臺獲取研究區(qū)原始影像數(shù)據(jù),根據(jù)無人機導(dǎo)航GPS/IMU定位定向系統(tǒng)和陀螺儀姿態(tài)信息獲取與影像相對應(yīng)的POS數(shù)據(jù)。
飛行航線的鋪設(shè)。為了高效獲取地面紋理信息,本文采用相機像幅長邊垂直于航飛方向。①飛行航線的鋪設(shè)取決于要獲取影像的重疊度,由于無人機姿態(tài)的不穩(wěn)定性和抗風(fēng)能力弱,容易丟片。②該研究對同一地物的采集如圖4所示,當(dāng)飛行平臺到達(dá)某一個定位置時,不能同時將同一地物不同側(cè)面紋理獲取,需要至少4(南北、北南、東西、西東)個方向的航線才能獲取同一地物的完整紋理信息。因此本文將影像的航向重疊度設(shè)置為80%,旁向重疊設(shè)置為70%。
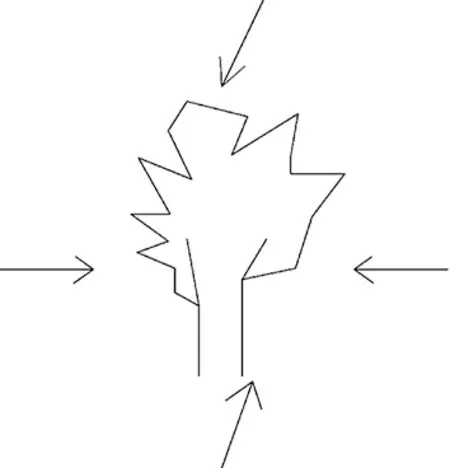
圖4 同一地物信息獲取方式
4.2 原始影像與POS數(shù)據(jù)
最終鋪設(shè)了624 km的總航線,本航攝區(qū)采用的固定翼無人機每架次可飛行 60 km的航線長度,為保證原始影像數(shù)據(jù)的質(zhì)量,數(shù)據(jù)采集時要求地物陰影倍數(shù)≤1,最后以11架次,共2天時間完成了航攝區(qū)原始影像的獲取,平均每天5.5架次,每架次平均飛行時間為 1 h。獲取了原始影像共 20 649張原始影像,20 818個POS記錄,共丟失了169張影像,經(jīng)人為檢查,丟失最多的航線為6張影像,出現(xiàn)連續(xù)丟片2張以上共1次,航線內(nèi)連續(xù)丟片處的兩張影像重疊度為40%,因兩邊的旁向此處不丟片,保證了影像最終的重疊。
4.3 像控點的獲取
Smart3D軟件的空三優(yōu)化模式是基于空間直角坐標(biāo)系的優(yōu)化方式[16],對原POS數(shù)據(jù)的依賴程度低,主要依靠控制點實現(xiàn)空三匹配點的拉動來完成絕對定向,進(jìn)而實現(xiàn)模型的絕對定位和幾何精度。研究區(qū)屬于不規(guī)則航攝區(qū)(如圖5所示),因此對于控制點數(shù)據(jù)的采集必須滿足以下要求:
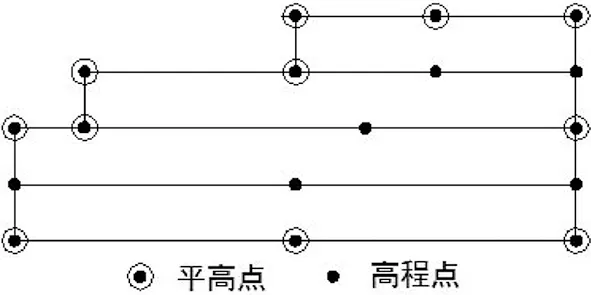
圖5 不規(guī)則區(qū)域網(wǎng)布控制點布設(shè)示意圖
(1)四周空曠,有明顯刺點地物標(biāo)志,且刺點位置在影像上清晰明了,無遮擋。
(2)2個子區(qū)域接邊處必須有公共控制點。
(3)范圍線邊上和轉(zhuǎn)角處控制點適當(dāng)加密。
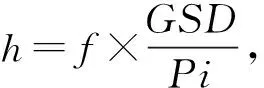
(4)范圍線內(nèi)控制點與航線垂直呈“品”字形布設(shè)。采用以下像片控制點航向基線數(shù)跨度估算公式進(jìn)行控制點布設(shè)。
(1)
(2)
式中:ms:連接點(空三加密點)的平面中誤差,單位為mm;mh:連接點(空三加密點)的高程中誤差,單位為m;K:像片放大成圖的倍數(shù);H:相對航高,單位為m;b:像片基線長度,單位為mm,mq:視差量測的單位權(quán)中誤差,單位為mm;n:航線方向相鄰平面控制點的間隔基線數(shù)[17,18]。
(5)為了提高數(shù)據(jù)獲取效率,因地制宜,優(yōu)先布設(shè)控制點在可達(dá)性強的地點。
模型的構(gòu)建采用CGCS_2000平面坐標(biāo)系,中央經(jīng)線114,3°分帶。因此,控制點坐標(biāo)的采集采用同樣的坐標(biāo)系。最終獲取了航攝區(qū)共102個控制點,其中有23個控制點不參與平差并作為后期檢查點。
4.4 實景三維模型的構(gòu)建
基于以上基礎(chǔ),將POS數(shù)據(jù)通過坐標(biāo)轉(zhuǎn)換成CGCS_2000的坐標(biāo)系,在原始影像與POS數(shù)據(jù)預(yù)處理合格后,在控制點采集期間,先將影像分塊導(dǎo)入Smart3D,以POS記錄輔助完成影像連接點提取、連接點匹配、內(nèi)定向以及平差等全自動空中三角測量處理,本次空三采用分塊集群空三,利用20臺工作站分配Smart3D的Engine模塊配合完成,對于空三結(jié)果不優(yōu)、分層、錯亂和丟片等進(jìn)行再一次空三,以保證每塊區(qū)域網(wǎng)內(nèi)部之間空三結(jié)果的最優(yōu),若仍然有不能完成空三的情況,則需要等待外業(yè)控制點完成以后,用控制點加以約束平差,實現(xiàn)空三優(yōu)化(如圖6所示)。
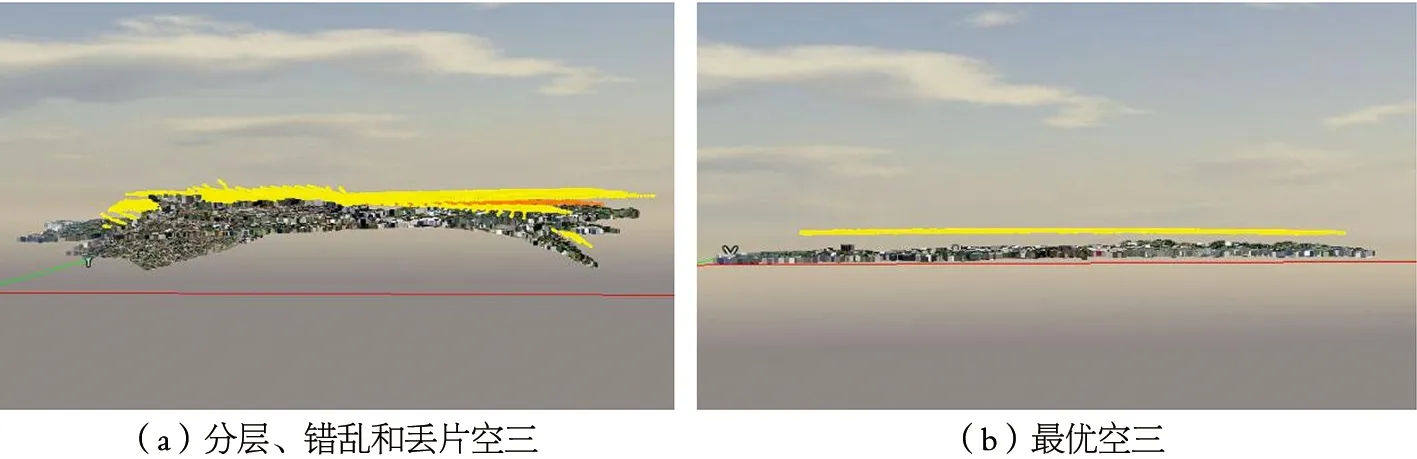
圖6 空三優(yōu)化對比
在不需要絕對定向,采用自由網(wǎng)生成模型的情況下,最優(yōu)空三便已經(jīng)可以用來生產(chǎn)實景三維模型,但是需要用于精準(zhǔn)量測、地形圖采集、地籍測量、定位導(dǎo)航和不動產(chǎn)登記等方面時,便必須加入控制點以完成最終空三的絕對定向。簡單地說,控制點的不可或缺性有以下幾點:①輔助空三完成絕對定向。②保證每一個分塊區(qū)域的絕對定位以及內(nèi)部地形地物的絕對幾何精度。③實現(xiàn)分塊區(qū)域的實景三維模型無縫接邊。
控制點輔助空三完成絕對定位,使得空三生成的點云具有高密集性,每個點云構(gòu)成的三角TIN網(wǎng)更具細(xì)節(jié)性,使得實景三維達(dá)到更高的可辨識性,包括房屋的屋檐、墻角和信號塔等。如圖7所示,所構(gòu)成的TIN網(wǎng)除了光滑地表點云稀少,復(fù)雜地面紋理處點云都比較密集,最終生成的白膜映射紋理后形成的實景三維均具有豐富的紋理細(xì)節(jié),幾乎沒有出現(xiàn)塌陷和缺失的現(xiàn)象。
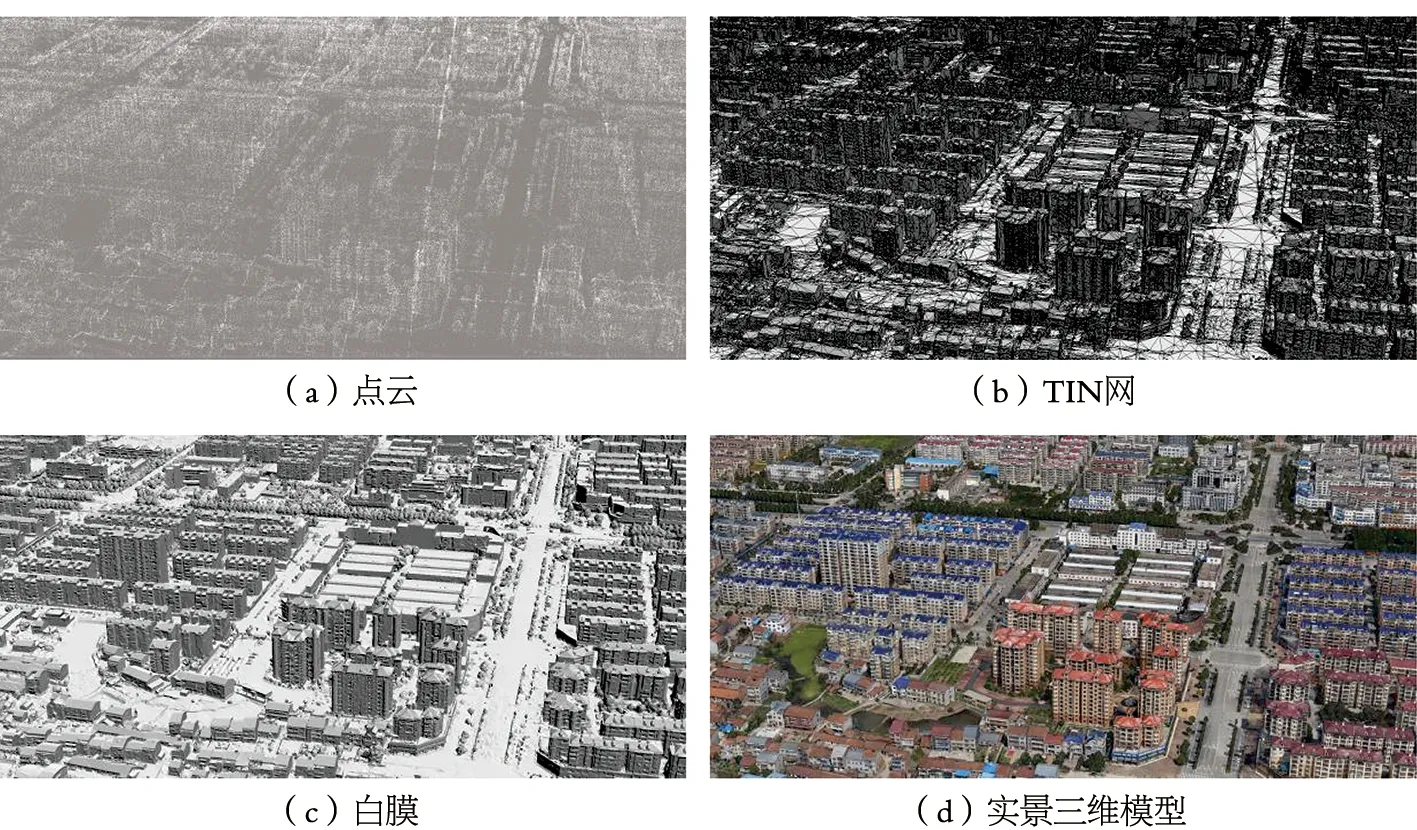
圖7 三維模型的構(gòu)建
4.5 模型幾何精度的校驗
基于以上基礎(chǔ),本文對模型進(jìn)行幾何精度(平面精度、高程精度)的檢驗,因模型是采用絕對坐標(biāo)的控制點對整個區(qū)域進(jìn)行空三加密解算未知點的,為消除加密點與糾正點可能存在的不同誤差,在使用不參與平差的23個檢查點進(jìn)行檢查外,引入8個參與平差的隨機控制點進(jìn)行檢驗,結(jié)果如圖8所示,所有檢查點誤差都在 0.3 m以內(nèi),8個控制點與23檢查點的波動變化性具有一定的一致性,證明加密點和糾正點在一定程度上具有統(tǒng)一的誤差系統(tǒng)。通過對X、Y、Z坐標(biāo)進(jìn)行平均中誤差統(tǒng)計,結(jié)果分別為 0.124 m、0.117 m、0.044 m。模型顯示出特別高的精度,尤其是高程,幾乎達(dá)到了 5 cm以內(nèi),可應(yīng)用于對精度要求高的行業(yè),如大比例尺地形圖的測繪、地籍測繪、土地確權(quán)和不動產(chǎn)登記等。
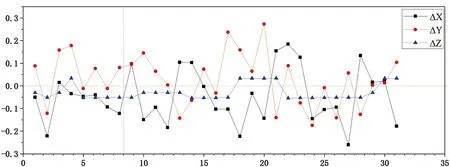
圖8 模型幾何精度誤差
5 結(jié)論與討論
在無人機數(shù)據(jù)獲取中,最終以平均每天5.5架次,每架次平均飛行時間為 1 h,獲取了原始影像共 20 649張原始影像, 20 818個POS記錄,通過對影像的預(yù)處理,對空三進(jìn)行自優(yōu)化和控制點絕對優(yōu)化,生產(chǎn)出最終X、Y、Z中誤差分別為 0.124 m、0.117 m、0.044 m的三維模型,通過與相對于3鏡頭與5鏡頭的傾斜攝影測量的對比,既不丟失模型幾何精度,也不丟失地面紋理信息,相反,載重小,續(xù)航能力強,地面紋理信息的細(xì)節(jié)表現(xiàn)也很豐富,可以很好地應(yīng)用于地形圖測繪、地籍測量、不動產(chǎn)登記、傳統(tǒng)村落數(shù)字保護(hù)、文物保護(hù)以及城鄉(xiāng)規(guī)劃等。
(1)因為原始影像對地面信息的獲取是通過十字交叉的形式獲取的,而且必須十字交叉才能保證地面紋理信息水平方向和垂直方向的完全獲取,如果產(chǎn)生偏差,則建筑物等具有不同側(cè)面信息的地物就會丟失紋理,使得實景三維模型中這類地物信息的丟失,對平整地面的影響則不大。
(2)對于原始影像數(shù)據(jù)的獲取需要很大的重疊度,旁向68%以上,航向75%以上。在3鏡頭和5鏡頭的傾斜攝影中,因有3個以上視覺的影像重疊,即使局部區(qū)域沒有達(dá)到重疊度,但是由于不同視覺的3°重疊或5°重疊彌補了某一視覺的缺陷,仍然可以很好地建模。
(3)在進(jìn)行三維模型的生產(chǎn)中,空三結(jié)果優(yōu)異程度決定了最終三維模型的優(yōu)化程度。第一,在空三解算的時候需要采用原始POS數(shù)據(jù)進(jìn)行空三內(nèi)部結(jié)果的優(yōu)化,第二,采用內(nèi)部優(yōu)化的空三結(jié)果結(jié)合控制點坐標(biāo)使得空三結(jié)果絕對優(yōu)化,目的是使得模型坐標(biāo)對應(yīng)在絕對地理坐標(biāo),空三內(nèi)部結(jié)果又進(jìn)一步優(yōu)化,濾除誤差點和錯誤點以保證最終三維模型的最優(yōu)精度。
模型中,靠近邊緣的誤差稍大些,因此在刺控制點時,應(yīng)充分保證測繪邊緣控制點的充足。部分光滑地面,如水面、雪區(qū)等,在空三時特征點較稀少,需要手動添加特征匹配點或者采用不同算法的特征提取進(jìn)行特征匹配空三。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
