基于三維激光掃描技術(shù)的空間坐標(biāo)傳遞測(cè)量及工程應(yīng)用
2021-07-12 03:32:30胡玉祥李勇張洪德尹相寶1孟慶年
城市勘測(cè) 2021年3期
關(guān)鍵詞:測(cè)量
胡玉祥,李勇,張洪德,尹相寶1,,孟慶年
(1.青島市西海岸基礎(chǔ)地理信息中心有限公司,山東 青島 266000; 2.青島市勘察測(cè)繪研究院,山東 青島 266032;3.青島市地下空間地理信息工程研究中心,山東 青島 266032)
1 引 言
三維激光掃描技術(shù)近幾年發(fā)展異常迅速,它突破了傳統(tǒng)的單點(diǎn)測(cè)量方式,能在單位時(shí)間內(nèi)發(fā)射幾十萬(wàn)甚至幾百萬(wàn)的點(diǎn),以點(diǎn)云的形式表達(dá)三維空間的幾何形態(tài),同時(shí)還可以采集高分辨相片,形成物體的三維正射影像,再現(xiàn)物體的真實(shí)三維形態(tài)[1,2],其測(cè)量成果不僅包含空間坐標(biāo)信息,還包含反射率等物理信息,通過不同測(cè)站三維點(diǎn)云的拼接、匹配,可實(shí)現(xiàn)空間三維坐標(biāo)的傳遞,對(duì)空間坐標(biāo)的有效傳遞提供了一種新的思路。
傳統(tǒng)三維空間傳遞的方法是使用導(dǎo)線測(cè)量或者聯(lián)系測(cè)量的方式進(jìn)行。導(dǎo)線測(cè)量是通過斜井布設(shè)導(dǎo)線一站一站地將平面坐標(biāo)引測(cè)到地下,高程則采用幾何水準(zhǔn)測(cè)量方式引測(cè)。聯(lián)系測(cè)量通常分為兩井定向和一井定向,兩井定向精度較高,對(duì)井口直徑?jīng)]有特殊要求,但實(shí)際工作中往往不具備做兩井定向的條件;一井定向通過懸掛鋼絲組成聯(lián)系三角形將平面坐標(biāo)和方位引測(cè)到地下,但其對(duì)井口直徑以及現(xiàn)場(chǎng)作業(yè)條件要求較高。對(duì)于現(xiàn)場(chǎng)不具備一井定向條件,且精度要求不是很高的項(xiàng)目,采用聯(lián)系測(cè)量方式甚至無能為力。青島連云港路地鐵勘探現(xiàn)場(chǎng)鄰近某地下電力管廊,為防止勘探過程中對(duì)電力管廊可能造成的破壞,需要測(cè)定地下電力管廊的平面位置和埋深,即管廊的三維空間位置;其中重要的工作便是將地面三維坐標(biāo)引測(cè)到地下。受電力井作業(yè)半徑和深度限制,采用傳統(tǒng)聯(lián)系測(cè)量三維坐標(biāo)引測(cè)方式不可行。針對(duì)此問題,本文借助三維激光掃描儀,在井口布設(shè)專用掃描標(biāo)靶,井下掃描井口標(biāo)靶,巧妙地將地面三維坐標(biāo)引測(cè)到地下;通過點(diǎn)云數(shù)據(jù)提取電力管廊的平面圖和剖面圖,有效獲取管廊平面位置和埋深,為類似工程提供了良好的借鑒。
2 外業(yè)掃描及數(shù)據(jù)處理
2.1 工程難點(diǎn)及策略
青島地鐵地質(zhì)勘探臨近一電力管廊,由于歷史原因,該管廊沒有歷史資料可用。為了防止勘探對(duì)該電力管廊可能造成的破壞,需要準(zhǔn)確測(cè)定該管廊的三維空間位置,以便制定合理、有效的鉆探方案。
確定該地下電力管廊準(zhǔn)確三維空間位置,首要工作是需要將地面三維坐標(biāo)引測(cè)到地下,然后人進(jìn)入到地下管廊內(nèi)部進(jìn)行現(xiàn)場(chǎng)施測(cè),經(jīng)內(nèi)業(yè)數(shù)據(jù)處理得到其三維空間位置關(guān)系。電力管廊不同于地鐵或者其他地下工程,距地面較深且有可供行人出入的專門通道;通往該地下管廊只能通過口徑約為 1 m、井深約為 5 m的電力井,這給三維空間坐標(biāo)的傳遞帶來了極大的困難,這也成為本工程的難點(diǎn)所在。采用全站儀直接觀測(cè)法根本不可能,采用聯(lián)系測(cè)量方式平面坐標(biāo)引測(cè)不具備條件,高程雖然可以通過懸掛鋼尺的方式引測(cè),但此方法費(fèi)時(shí)、費(fèi)力,加之地下電力管廊空間狹窄,對(duì)水準(zhǔn)讀數(shù)帶來極大不便。井口引測(cè)示意圖如圖1所示。

圖1 井口引測(cè)示意圖
考慮到三維激光掃描儀外業(yè)采集過程不需要特殊觀測(cè)條件,只要能夠通視,掃描儀便可以通過高速旋轉(zhuǎn),采集可視范圍內(nèi)的三維空間坐標(biāo)和紋理信息;掃描儀測(cè)程可以達(dá)到一百甚至幾百米,在井下架設(shè)掃描儀,完全可以掃到井口,通過在井口布設(shè)3個(gè)專用標(biāo)靶(標(biāo)靶結(jié)構(gòu)如圖2所示);地面通過全站儀準(zhǔn)確獲取3個(gè)標(biāo)靶中心點(diǎn)三維坐標(biāo),地下則通過掃描儀將井口標(biāo)靶中心掃入點(diǎn)云中,通過測(cè)站之間的點(diǎn)云拼接,將井口和井下空間形成一個(gè)統(tǒng)一的整體,從而巧妙地將地上三維空間坐標(biāo)引測(cè)到地下。作業(yè)方式如圖1所示。

圖2 掃描儀專用黑白標(biāo)靶示意圖
2.2 外業(yè)掃描
(1)分辨率選擇
外業(yè)作業(yè)過程要兼顧效率和精度要求,為提高效率可以選擇低密度進(jìn)行掃描,但低密度掃描容易造成點(diǎn)云過于稀疏,細(xì)部紋理不能很好地表達(dá);過高的密度雖然可以更好地表達(dá)細(xì)部紋理,但比較費(fèi)時(shí)且更后續(xù)數(shù)據(jù)處理帶來不便。本工程項(xiàng)目主要關(guān)注地下電力管廊的三維空間位置信息,對(duì)于紋理信息要求不高,結(jié)合表1性能參數(shù),兼顧精度要求,本項(xiàng)目可以采用中密度掃描模式;為了后續(xù)點(diǎn)云匹配的方便,在掃描過程中采用拍照模式。

三維激光掃描儀性能參數(shù) 表1
為了將地面三維空間坐標(biāo)準(zhǔn)確引測(cè)到地下,需要準(zhǔn)確獲取井口3個(gè)標(biāo)靶中心點(diǎn)的三維坐標(biāo),地面可以采用導(dǎo)線測(cè)量或者后方交會(huì)方式準(zhǔn)確獲取標(biāo)靶中心點(diǎn)坐標(biāo)。井下第一站掃描過程中需要將井口3個(gè)標(biāo)靶轉(zhuǎn)向下方(如圖3所示),從而將標(biāo)靶掃入點(diǎn)云中方便坐標(biāo)傳遞。

圖3 井口標(biāo)靶示意圖
2.3 數(shù)據(jù)預(yù)處理
(1)點(diǎn)云拼接與去噪
點(diǎn)云拼接是將多站掃描數(shù)據(jù)拼接到一個(gè)整體的過程,采用徠卡配套的專用拼接軟件REGISTER 360進(jìn)行,一般有兩種方式:基于公共點(diǎn)的拼接和基于點(diǎn)云視圖的拼接[2,3]。由于地下電力管廊的相似度較高,采用視圖拼接難度較大,故采用基于公共標(biāo)靶的拼接方式,在RTC360點(diǎn)云拼接中,每站拼接完均可以得到點(diǎn)云匹配的相關(guān)精度信息,如圖4所示;將不同測(cè)站點(diǎn)云通過拼接可以得到電力管廊的整體效果圖,如圖5所示。
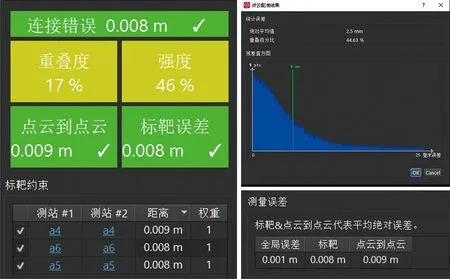
圖4 點(diǎn)云拼接精度信息

圖5 點(diǎn)云拼接整體效果圖
點(diǎn)云融合就是將不同站點(diǎn)、不同儀器設(shè)備的點(diǎn)云數(shù)據(jù)合并在一起的過程,在外業(yè)掃描過程中,每站都會(huì)有很多的重合點(diǎn)云數(shù)據(jù),將各站點(diǎn)云數(shù)據(jù)拼接在一起就造成點(diǎn)云數(shù)據(jù)的重疊,點(diǎn)云融合的目的就是根據(jù)點(diǎn)云歸一化算法將重疊點(diǎn)云進(jìn)行優(yōu)化的過程。
在掃描儀的原始點(diǎn)云中往往包含若干對(duì)于成果處理有不良影響的點(diǎn),點(diǎn)云去噪就是根據(jù)一定的點(diǎn)云濾波算法,讓有效點(diǎn)保留,無效點(diǎn)刪除的過程,由于地下管廊空間狹小、濕度大,空氣中懸浮液體小顆粒,掃描過程中由于空氣散射、折射容易生成漂浮、散亂點(diǎn)云,通常采用八叉樹、空間單元閾值函數(shù)等[7,8]方法自動(dòng)剔除空間散亂點(diǎn)云;通過點(diǎn)云自動(dòng)濾波剔除無效點(diǎn)云后還應(yīng)進(jìn)行全面的檢查,對(duì)于細(xì)節(jié)部分還需要進(jìn)行人工精細(xì)剔除點(diǎn)云。
(2)三維坐標(biāo)匹配
通過上述點(diǎn)云拼接的過程,整個(gè)電力管廊形成了一個(gè)空間整體,但此整體是相對(duì)的,還需要進(jìn)行點(diǎn)云的絕對(duì)定向。絕對(duì)定向的過程即是進(jìn)行坐標(biāo)轉(zhuǎn)換的過程,通過三個(gè)標(biāo)靶中心的空間坐標(biāo)來計(jì)算轉(zhuǎn)換參數(shù),轉(zhuǎn)換過程通常利用布爾莎7參數(shù)模型,即:
(1)

2.4 電力管廊平剖面繪制
徠卡專業(yè)點(diǎn)云后處理軟件Cyclone具有良好的可擴(kuò)展性,通過開發(fā)相應(yīng)的插件可以實(shí)現(xiàn)點(diǎn)云數(shù)據(jù)與一些專業(yè)繪圖軟件(AutoCAD、EPS、MicroStation、ArcGIS等)進(jìn)行互通。將經(jīng)過上述處理的點(diǎn)云加載到插件Cloudworx中,進(jìn)行坐標(biāo)系的旋轉(zhuǎn)和網(wǎng)格建立,定義參考面,使得點(diǎn)云便于人眼識(shí)別提取,然后利用Cyclone進(jìn)行點(diǎn)云的切片處理;在CAD中繪制電力管廊的平面圖和剖面圖(帶有絕對(duì)坐標(biāo)),如圖6、圖7所示。

圖6 電力管廊地下平面圖

圖7 電力管廊地下剖面圖
3 精度驗(yàn)證及分析
本工程中,通往電力管廊首尾各有一個(gè)電力井,如果具備條件可以在兩個(gè)井口各擺設(shè)3個(gè)標(biāo)靶,通過一站一站掃描,將首尾井口標(biāo)靶連成一個(gè)整體,這樣可以以一個(gè)井口作為檢核,提高施測(cè)的精度和可靠性。然而,本工程由于尾部井底全是淤泥,在地下作業(yè)過程中無法接近井口底部,因而無法將井口標(biāo)靶掃描到點(diǎn)云中,但此井口可以通過遠(yuǎn)處掃描將其掃到點(diǎn)云中。為驗(yàn)證該手段傳遞空間坐標(biāo)的有效性和可靠性,將尾部井口擺設(shè)的三個(gè)標(biāo)靶中心坐標(biāo)準(zhǔn)確測(cè)定,從而可以擬合出此井口中心三維坐標(biāo)(方式一,可認(rèn)為井口三維坐標(biāo)真值);同時(shí)在點(diǎn)云中提取出尾部井口點(diǎn)云,通過點(diǎn)云后處理軟件Cyclone中的空間擬合功能,擬合出尾部井口(圖8),進(jìn)而提取出擬合圓的三維中心坐標(biāo)(方式二)。

圖8 點(diǎn)云擬合電力管井口示意圖
將方式一和方式二擬合的井口中心坐標(biāo)進(jìn)行對(duì)比,兩種方式的較差如表2所示。
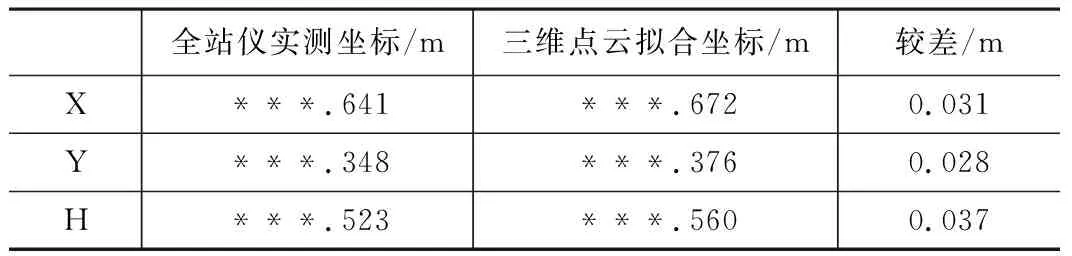
兩種方式管井坐標(biāo)對(duì)比 表2
從表2中可以看出,通過兩種方式擬合的三維坐標(biāo)較差在 3 cm左右,完全滿足《城市測(cè)量規(guī)范》(CJJ/T8-2011)及項(xiàng)目測(cè)繪精度要求。
4 結(jié) 論
三維激光掃描技術(shù)可以在單位時(shí)間內(nèi)獲取精度高、數(shù)據(jù)量大的三維空間信息,它以三維坐標(biāo)為整體,能夠?qū)⒖臻g物體真實(shí)還原,加之配賦坐標(biāo)信息即可得到三維立體空間形態(tài)。針對(duì)電力管廊三維坐標(biāo)傳遞困難、傳統(tǒng)方法難以實(shí)施的難題,本文借助三維激光掃描技術(shù),以某一地下電力管廊三維空間位置測(cè)定項(xiàng)目為例,從項(xiàng)目難點(diǎn)和對(duì)策、掃描作業(yè)方法以及關(guān)鍵技術(shù)手段進(jìn)行了探討,在項(xiàng)目實(shí)施過程中得到了一些有益結(jié)論:
(1)針對(duì)電力管廊井口小、井深淺,聯(lián)系測(cè)量傳遞坐標(biāo)無法實(shí)施時(shí),可以考慮使用三維激光掃描技術(shù)手段進(jìn)行空間坐標(biāo)的引測(cè)。
(2)外業(yè)掃描站與站之間通過公共特征點(diǎn)進(jìn)行聯(lián)系,精度取決于點(diǎn)云拼接精度;不相鄰測(cè)站之間不存在誤差累計(jì),提高了地下管廊整體測(cè)繪精度。
(3)通過一個(gè)井口傳遞坐標(biāo),點(diǎn)云絕對(duì)精度取決于井口標(biāo)靶坐標(biāo)配賦精度,由于井口直徑較小,坐標(biāo)配賦精度較差,不利于點(diǎn)云絕對(duì)精度的提高。
(4)此項(xiàng)目雖然有首尾兩個(gè)電力井可以使用,但尾部井口地下部分不具備掃描標(biāo)靶條件;如果具備條件,利用兩個(gè)井口的標(biāo)靶進(jìn)行坐標(biāo)配賦不僅可以相互檢核,同時(shí)可以提高整體點(diǎn)云絕對(duì)精度。
(5)采用三維激光掃描設(shè)備進(jìn)行外業(yè)測(cè)量時(shí),如果具備條件,可以采集部分離散特征點(diǎn)三維坐標(biāo)作為檢核,以驗(yàn)證掃描的準(zhǔn)確性和可靠性。
猜你喜歡
小學(xué)科學(xué)(學(xué)生版)(2021年5期)2021-07-22 02:40:06
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
軍事文摘·科學(xué)少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學(xué)少年(2017年2期)2017-04-26 21:58:43
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學(xué)低年級(jí)版)(2015年4期)2015-04-29 00:00:00
