Link16數據鏈跳頻入網信號模擬產生技術
2021-07-13 08:14:26李日永顧明超
無線電通信技術 2021年4期
關鍵詞:信號
李日永,霍 帥,顧明超
(1.中國人民解放軍91404部隊,河北 秦皇島066000;2.中國電子科技集團公司第五十四研究所,河北 石家莊050081;3.河北省電磁頻譜認知與管控重點實驗室,河北 石家莊050081)
0 引言
在通信和通信對抗裝備試驗過程中,需要模擬出各種目標信號和不同復雜程度的通信信號電磁環境[1]。Link16數據鏈(TADIL-J)是美軍及北約等國家陸、海、空軍應用最為廣泛的戰術數據鏈,可在戰時作為主要數據鏈。聯合戰術信息分發系統(JTIDS)是Link16的通信終端,具備通信、相對導航、網內敵我識別三大通信功能[2]。對該信號進行偵收與測向,可實現對輻射源目標分選、測向以及定位功能。研究該信號特征屬性和組網方式等對我方電子裝備對抗能力提升具有較強現實意義,對同類設備研制也有一定借鑒意義。
Link16信號組網模擬技術和模擬系統的搭建能夠為新型通信偵察測向和干擾裝備提供測試的電磁環境,對其分析識別和干擾能力評估提供重要依據。與常規通信體制不同的是,Link16數據鏈信號采用高速跳頻方案,跳速為 76 923 Hops/s[3],收發雙方的跳頻圖案保持一致、時間高度同步是端機間正常通信的前提。本文描述了Link16數據鏈組網的原理,對同屬一個網絡的兩個節點之間建立鏈接的過程進行描述,包含粗同步和精同步的詳細過程。在工程實踐的基礎上,介紹了Link16數據鏈網絡中節點建立通信過程的硬件實現。
1 Link16跳頻入網技術
1.1 Link16信號TDMA接入
Link16 數據鏈是采用 TDMA 接入方式的點對點鏈路網絡,從時間上劃分為周期重復的時元(12.8 min/時元),每個時元劃分為 64時幀(12 s/時幀),每個時幀又可劃分為1 536時隙(7.812 5 ms/時隙)。各節點成員一個時幀內被分配到多個時隙發出待傳信息,此時其他的節點成員切換至廣播信息接收狀態,每個網絡成員在 12 s(一個時幀)內與網絡進行一次數據共享。但時隙不會直接分配給網絡中節點成員,首先分配至網絡參與組(NPG),然后再分發至加入 NPG的節點成員。Link16傳輸消息分為固定格式消息、可變格式消息和自由文本,消息類型共計為 91 種。傳輸同類消息成員組成一個 NPG,NPG各節點成員在劃定時隙內工作,共同完成 NPG 承擔的任務。節點成員占據多少時隙,取決于數據量、節點成員數目等因素[4]。
1.2 Link16網絡時間粗同步
時分復用系統中各節點分時隙傳輸,系統需要準確定時和同步,否則時隙混亂會導致系統癱瘓。Link16 采用主從式的同步模式,每個Link16網絡都會有一個結點作為網絡時間基準(NTR)[5],其時鐘更精確,定義時隙起始與結束點,為整個網絡節點提供時間標準,通常由航母、大型預警機或地面控制中心承擔。NTR 在固定時隙塊發送初始入網和網絡時間更新,新入網設備不斷調整時隙窗口嘗試接收 NTR 發送的入網消息,一旦正確接收就可利用接收到時隙起始標準,調整自身時鐘實現粗同步過程。
Link16粗同步檢測模塊包括4個窄帶單頻點接收通道,在進入粗同步過程時[6],將這4個通道分別設置為設備當前時刻6 s后的某個時隙的第5、6、7、8個頻點。根據Link16粗同步信號的跳頻圖案規律,時隙的粗同步脈沖第9、10、11、12頻點分別與第5、6、7、8頻點相同。因此若收發兩端的時刻偏差不超過6 s,則必定能在12 s內收到這8個脈沖,且其碼元與本地產生的碼元相同,這4個通道的脈沖依次間隔13 μs出現,粗同步處理原理如圖1所示。

圖1 粗同步處理原理框圖Fig.1 Block diagram of coarse synchronization processing
在方案設計中,考慮到部分頻點可能被干擾,實際只要有兩個通道接收到該信號,就可以判定為疑似本網Link16同步信號,然后控制通道1進行跳頻對準接收脈沖信號載波,并對后面的脈沖進行相關檢測與解調,解調后與本地碼比對。如果比對成功,則粗同步成功,否則重新開始粗同步過程。
經過粗同步過程后,設備與網絡之間的時差僅相差電磁波傳播的誤差,約±1 ms。
1.3 Link16網絡時間精同步
粗同步后同步精度仍不滿足精度要求,進一步需要網絡時間精確定時。精同步主要通過交換往返計時(RTT)消息消除節點與 NTR時差,使節點時鐘接近NTR基準。需要精同步的節點首先發送RTT詢問消息給NTR,NTR在網絡節點時隙開始后4.275 ms發送RTT應答,該應答包含收到詢問消息時間,詢問節點利用該消息與測量應答消息到達節點時間,可計算出節點與NTR時間誤差,從而做出校正。在精同步完成后,各節點仍與NTR周期地交換RTT,不斷微調時鐘保持時間同步。精同步設計中,使用RTT往返計時實現時差的校準[7],精同步成功后,此時同步誤差約為±50 ns。
通過以上步驟,逐步減小設備與網絡中其他節點間的時差,與網絡建立同步從而成功入網。兩級同步誤差范圍如表1所示。
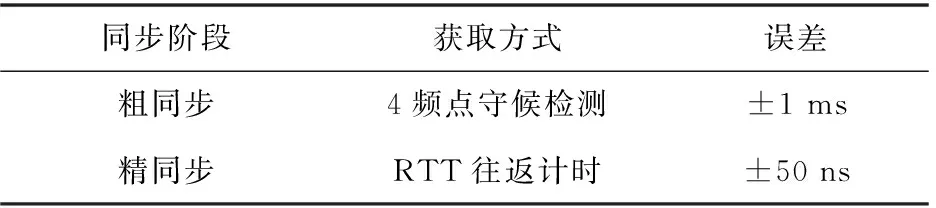
表1 兩級同步誤差范圍
2 Link16模擬系統實現
設計的信號模擬器系統包含多個節點用戶,主要為了模擬驗證Link16組網中的任意兩個節點通過粗同步和精同步脈沖產生和接收處理過程,模擬網絡中節點終端通過TDMA方式入網與通信的全過程。單個節點的硬件包含消息發送和接收兩部分,集成在一片XC7VX690T和一片TMS320C6678上實現。
2.1 Link16消息產生過程
Link16數據鏈消息分為固定格式、可變格式和自由文本三種。固定格式消息主要用來發送指揮和作戰消息,即通常所指的J系列消息;可變格式消息內容長度均使可變的,主要用于美軍陸軍,現已發展成為K系列消息;自由文本消息沒有標準格式限制,主要用于話音通信。本文主要關注J系列消息即固定格式消息的結構。
J系列消息主要包含粗同步、精同步、報頭和數據四部分,前面添加抖動,后面添加傳輸保護。
消息緩沖區產生210 bit消息,與15 bit源航跡號合在一起進行(237,225)的CRC校驗編碼,此時數據為225 bit,再與35 bit報頭信息進行消息加密,此時數據量為260 bit。
經過消息加密后的數據,Lin16定義5 bit為一個字符,再接著進行RS編碼。其中35 bit的報頭采取(16,7)編碼,數據采用(31,15)編碼。經過編碼后,報頭數據為80 bit,數據為465 bit,一共545 bit,合計109個字符。
不同字符對應不同的CCSK擴頻碼,擴頻碼長32,碼片速率5 Mbit/s,每個碼片持續時間0.2 μs,所以32個碼片長度為6.4 μs[8],也就是一個Link16信號的脈沖寬度。
系統中還會很據報頭信息中的SDU字段生成一個32 bit的偽隨機碼,與CCSK擴頻后的碼字進行異或運算,增強系統的保密性。
加密后的基帶數據,再通過MSK調制,數據為1采用高載波頻率發送,數據0用低載波頻率發送。
調制后的碼流經過數據封裝模塊,添加粗同步字符和精同步字符,粗同步為16個雙脈沖字符,精同步為4個雙脈沖字符。封裝后的數據在跳頻載波的作用下,將信號通過天線發射出去。整個實現過程如圖2所示。

圖2 Link16消息產生過程Fig.2 Link16 message generation process
2.2 Link16消息產生硬件實現
單節點Link16消息產生由一片XC7VX690T型FPGA和一片TMS320C6678型DSP共同實現。在DSP中實現Link16消息基帶碼產生的過程。首先發送消息和航跡號,根據當前時隙的封裝格式進行封裝,形成符合Link16體制的信源。接下來對信源依次進行CRC編碼、消息加密、RS編碼以及交織等操作,最終把形成的基帶碼通過4XSRIO總線實時送往FPGA進行后續信號級產生。消息產生過程如圖3所示。

圖3 信號產生DSP實現流程Fig.3 DSP implementation of signal generation
在FPGA上實現Link16消息數據產生的過程。通過總線接收由DSP產生的基帶碼,對其進行CCSK擴頻操作,即將5 bit消息用32位偽隨機序列表示。例如數據00000由序列01111100111010010000101011101100表示[9],而其余31種結果由序列循環移位產生。接下來對碼流依次進行傳輸加密,MSK調制形成基帶數據,再通過跳頻表產生對應頻率的載波信號對基帶信號進行上變頻,最后根據時隙表產生脈沖信號通過DA芯片產生模擬信號發出。FPGA實現消息數據產生過程如圖4所示。
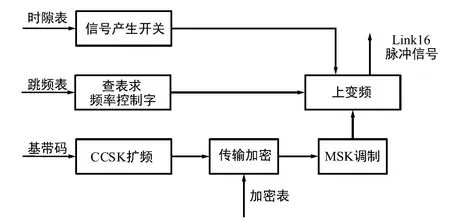
圖4 信號產生FPGA實現流程Fig.4 FPGA implementation of signal generation
2.3 Link16消息接收過程
Link16消息的接收是其消息產生的反過程,通過采樣將接收信號數字化,通過相關運算進行粗同步和精同步,再解CCSK擴頻,解傳輸加密,解交織與解CRC編碼等信號處理操作,最終得到發送方消息,詳細過程如圖5所示。
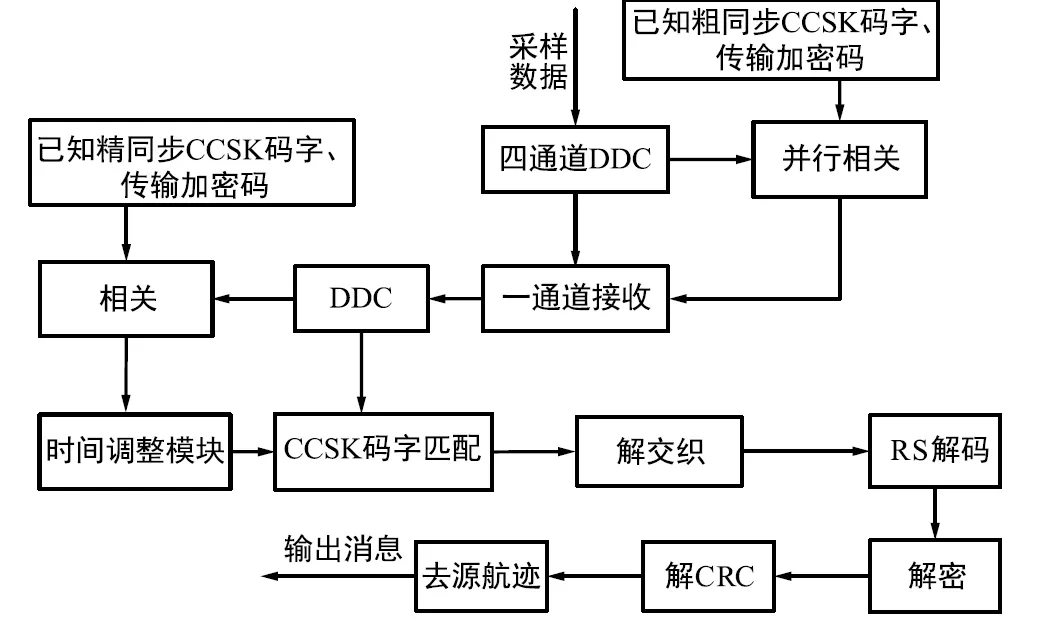
圖5 Link16消息接收過程Fig.5 Link16 message receiving process
由于時隙內的跳頻圖案、偽隨機碼收發雙方都是已知的。按照粗同步的頻點采取多頻點并行濾波抽取后進行相關運算,通過對相關峰與設定門限進行比較從而判定是否有粗同步脈沖到來。在4個窄帶變頻通道中的任意一個通道中都會出現相距52 μs(4對雙脈沖)的兩個相關峰。當4個通道滿足峰值門限時,產生捕獲成功標志,進一步轉入精同步校驗階段。
8個本地精同步脈沖和接收的碼字相比較,如果一致即可判定完成了精同步過程。這段相關接收過程精同步頭已經通過校驗,獲取了符號同步信息,估計出最佳采樣時刻輸出,得到解調碼流輸出。對碼流進行RS解碼、解密和解CRC編碼,再去掉源航跡和報頭信息,即恢復出原始消息數據。
2.4 Link16消息接收硬件實現
Link16消息接收由一片型號為XC7VX690T的 FPGA和一片TMS320C6678型DSP共同實現。在FPGA中,實現消息的接收處理流程。首先對采樣數據進行數字下變頻處理,將數據轉化為零中頻數據,采樣率抽取至20 MSPS。Link16信號符號速率為5 Mbit/s,當前采樣率為4倍過采樣,可滿足后續的信號處理需,同時也可節約處理模塊在FPGA中的資源消耗。接下來對零中頻信號進行粗通歩,精同步處理,將本地時間校準為NTR時間,實現初始入網。
完成入網后便可對一個時隙中的報頭和消息本體進行解析。首先對32個CCSK偽隨機序列進行傳輸加密操作,形成32個本地碼。將接收信號與本地碼相關,通過相關性可判決出當前脈沖所對應的偽隨機序列,即可得到5 bit消息碼。將解析出的消息碼通過總線送往DSP進行后續處理。FPGA消息接收的處理流程如圖6所示。
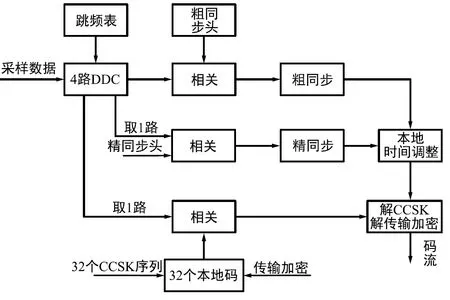
圖6 FPGA消息接收處理流程Fig.6 Message receiving process for FPGA
DSP實現消息接收的處理流程。通過總線接收到CCSK解調后碼流,待得到一個完整時隙的碼流后對其進行解交織、RS解碼、消息解密以及解CRC等處理,最后將消息本體提取出來上報上位機,完成整個Link16消息接收流程。DSP實現消息接收的過程如圖7所示。

圖7 消息接收DSP處理流程Fig.7 Message receiving process for DSP
2.5 相關接收及硬件實現
在整個模擬源處理系統中,初始入網和消息接收流程都用到了信號相關接收技術,下面展開論述信號相關的原理及硬件實現流程。
MSK是恒定包絡連續相位頻率調制,其信號數學表達式為[10]:
Smsk(t)=cos(ωct+παk/2Ts+φk),
(1)
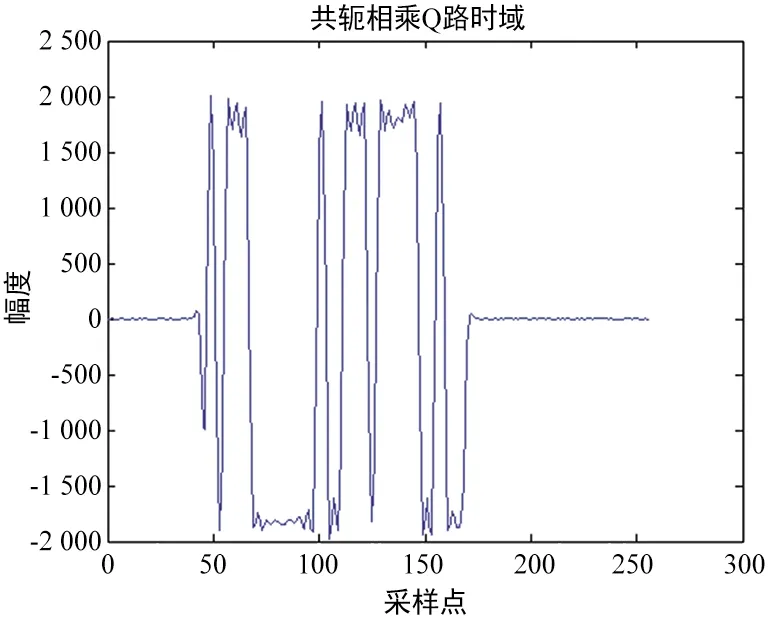
其中,kTS 令θk(t)=(παk/2TS)t+φk,則式(1)可以表示為: Smsk(t)=cos(ωct+θk(t)), (2) 式中,θk(t)為附加相位函數;ωc為載波角頻率;TS為碼元寬度;αk為第k個輸入碼元,取值為±1;φk為第k個碼元的相位常數,在一個碼元內保持不變,其作用是保證在t=kTS時刻相位連續。 由附加相位函數θk(t)的表達式不難看出,θk(t)為直線方程,其斜率為παk/2TS,截距為φk,間隔為TS。當αk=+1時,則θk(t)線性增加π/2;當αk=-1時,θk(t)線性減少π/2。由此可得到結論:間隔為TS,以載波信號為基準的信號相位的變化為+π/2或-π/2。 圖8介紹了信號相關處理流程,采樣數據經過數字信道化運算后轉化為零中頻IQ數據,將數據延時一個碼元寬度,再與原數據共軛相乘,求得可表征相鄰碼元相位差的結果。 圖8 相關值包絡計算流程Fig.8 Calculation process of correlation value 由上文可知,相鄰碼元間相位差為+π/2或-π/2,故可判斷相差數據流的主要特性由虛部Q路表征,且虛部Q路符號由碼元決定。將Q路數據與本地碼元進行卷積運算,得到相關包絡,仿真結果如圖9和圖10所示。 圖9為信道化后窄帶數據,延遲共軛相乘后的Q路結果。圖10為Q路信號與CCSK本地擴頻碼以及傳輸加密碼相關后的曲線,當信號與本地碼完全匹配重合時,此時相關值最大,出現相關峰。 在本模擬系統的實現中,采用數據不動碼字移動的相關方法,通過32路并行相關運算,每路相關值搜索最大值,再對32路相關最大值進行比較,相關峰最大的通道所對應的本地碼字相位與數據對齊,通過相關峰位置來獲取最佳采樣時刻,完成對信號的解調處理。 圖9 延遲共軛相乘Q路結果Fig.9 Quadrature calculation of delay conjugate multiplication 圖10 Q路信號相關運算后包絡Fig.10 Correlation value of the quadrature calculation 在當前及未來的戰爭中,數據鏈將成為海陸空三軍聯合作戰中的戰術通信重要組成部分。在復雜的戰場環境中,保障戰術數據交換的可靠性和有效性對戰爭主動權的獲取至關重要。在此背景下,研究Link 16數據鏈信號模擬中的關鍵技術對我軍信息化建設具有積極借鑒意義。 與常規通信體制不同的是,Link16數據鏈系統采用高速跳頻信號體制,收發雙方節點的跳頻圖案和規律一致、時間高度同步是正確接收到信號的前提。本文研究的Link16信號產生與Link16信號相關接收等模擬關鍵技術,為研究Link16節點設備入網以及通信提供了技術基礎,為Link16模擬方法研究和模擬相似性提升提供技術支撐。下一步還要繼續開展可變格式和隨機文本消息的產生與接收工作,使得信號模擬設備具備多種消息產生接收模式,以適應不同場景的應用需求。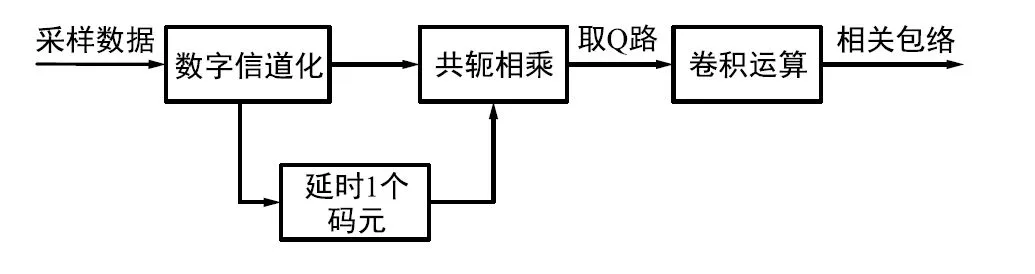

3 結束語
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06