
基于4G/5G的車輛監測系統*
2021-07-14 08:33:50黃原有張楊志
機電工程技術 2021年4期
黃原有,陽 韜,張楊志
(華南理工大學廣州學院,廣州 510800)
0 引言
目前,我國經濟發展迅速,汽車的數量也越來越多,但每年汽車事故頻繁發生,車輛安全已成為人們出行主要問題。現在的車輛監測系統主要是采用STM32單排片機驅動定位[1]、酒精、溫濕度、火焰[2]等傳感器,采集數據后通過服務器傳送到后臺管理,進而進行車輛的監測。而基于4G/5G的車輛監測系統是采用4G/5G模組,進行數據的高速傳輸,將車輛的行駛信息快速傳送到后端及進行數據的處理,并顯示在后臺界面,然后將后端的指令傳達到底層的車輛監測系統,實現監測系統的實時性。
本文研發一種基于4G/5G的車輛監測系統,主要是運用STM32單片機驅動多種傳感器,進行數據的收發,并傳給Jetson Nano人工智能處理器,再通過Jetson Nano將攝像頭的圖像信息以及底層的信息,上傳到后臺管理進行車輛的監測,用以提高車輛駕駛的安全性。
1 系統整體設計
基于4G/5G的車輛監測系統是通過底層的車載監測系統進行數據的收發,經過4G/5G模組將底層的數據上傳到云服務器端,最后經過數據分析處理將車輛的行駛狀況信息顯示在監測管理中心。底層的車載監測系統通過由STM32f407驅動多種傳感器組成的底層監測系統與中上層的Jetson Nano人工智能處理器組成,進行各種數據的采集和監測,同時可以接受管理端的相關指令。管理監測中心則主要是可以接入互聯網的機房,接收車載安全控制系統傳輸的數據,進行車輛數據的管理、實時顯示、故障分析、突發狀況報警等。云服務器端進行車輛數據的存儲和分析,供客戶端訪問查看數據。系統整體設計如圖1所示。
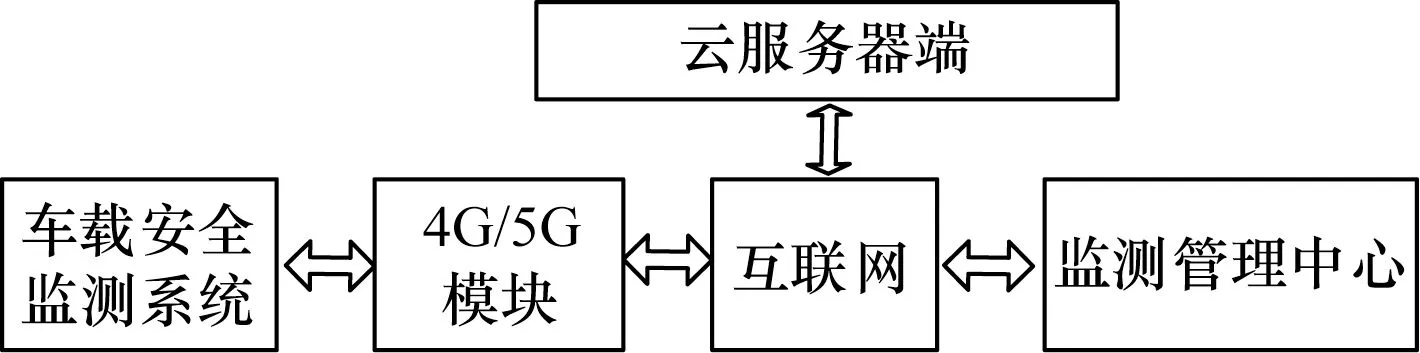
圖1 系統整體設計
2 系統硬件設計
系統硬件部分的主要車載監測硬件系統如圖2所示,系統的硬件部分可以分為由STM32單片機控制傳感器組成的底層嵌入式系統和由Jetson Nano人工智能處理器控制的中層系統。
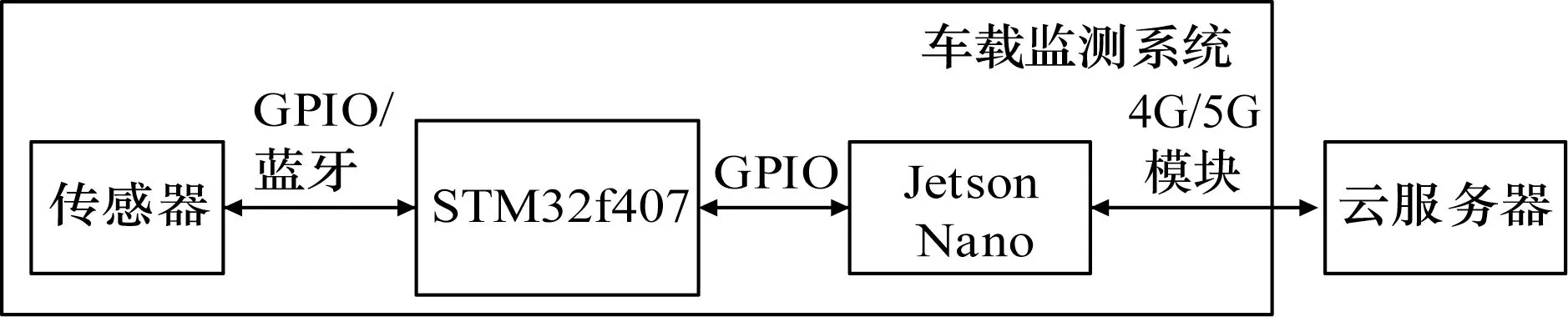
圖2 車載監測硬件系統
2.1 底層嵌入式系統
系統的硬件設計如圖3所示,底層嵌入式系統主要是通過STM32f407驅動紅外傳感器、車輛控制系統的CAN總線接口[3]、氣體酒精傳感器模塊、MPU陀螺儀角度傳感器、司機體征檢測手環以及北斗定位模塊去采集車輛以及駕駛員的信息。

圖3 系統的硬件設計
紅外傳感器是用于安裝在車門的位置,用于記錄車載人數,便于發生事故時對傷員的及時救援。而車輛的控制系統的CAN總線接口則用于讀取車輛設備的狀態信息。對于氣體酒精傳感器模塊則是用于安裝在汽車方向盤的位置,便于檢測司機呼出的氣體中的酒精含量,進而判別司機是否酒駕,如有酒駕的情況,則后臺管理系統將提醒司機酒駕的危險駕駛行為。而MPU陀螺儀角度傳感器則用于檢測車輛的姿態信息,判斷車輛是否發生碰撞及汽車當前車速信息,及時上傳給后臺。司機體征檢測手環則用于采集司機的心率信息,并通過藍牙將信息傳送到STM32f407單片機,使后臺管理中心能及時得知司機心率等身體狀況信息。北斗定位模塊基于北斗衛星導航系統對汽車進行定位,將車輛的位置信息及時反饋到后臺。
2.2 Jetson Nano人工智能處理器
當底層的監測系統采集的數據通過串口將車輛的信息傳送到Jetson Nano人工智能處理器后,Jetson Nano會將車輛信息以及攝像頭的信息,通過4G/5G模組一起將信息上傳到云服務器端。
駕駛位攝像頭主要用于人臉識別[4],識別駕駛司機是否為車主,如若不是,則發出警報。司機的人臉識別主要基于卷積神經網絡[5],將司機的圖像預先錄入到系統中,進行人臉檢測和灰度處理形成訓練集,再進行人臉識別建模,經過多輪的訓練使模型的精確度達到90%
以上則將模型保存。等下次司機駕駛時,則將采集司機圖像,經過人臉檢測和灰度處理后,作為模型的測試集輸入到模型,進行人臉識別,這時會設置一個閾值,當識別人臉的概率大于等于這個閾值則輸出正確的人名,小于該閾值則輸出為陌生人。
車內置攝像頭主要用于監控車內的駕駛環境,如在大巴上有不法分子干擾司機駕駛,則后臺人員監測到這一畫面時,可以及時發出警報,并且可以記錄這段監控錄像,將犯罪分子繩之于法。
前置攝像頭主要用于監控車輛行駛時前方的行駛路況,便于發生突發情況時報警。
黨的十九大報告指出:推進綠色發展。加快建立綠色生產和消費的法律制度和政策導向,建立健全綠色低碳循環發展的經濟體系。構建市場導向的綠色技術創新體系。構建政府為主導、企業為主體、社會組織和公眾共同參與的環境治理體系。
4G/5G模組主要是對Jetson Nano中的數據進行轉發,因其傳輸速度非常快,所以將監測系統的延時降到了最低,能夠實時監測車輛的行駛狀況。
3 系統的軟件設計
3.1 軟件網絡結構
如圖4所示,系統的軟件部分主要是上層部分,即Jetson Nano人工處理器的車載數據,將會通過4G/5G模組上傳到云服務器,云服務器將對這些數據進行分析和處理,并記錄車載和已處理的信息。后臺管理設備可以通過路由器訪問云服務器上已處理的數據[6],并顯示在后端界面上。也可以開發一個微信小程序,移動設備可以進入該小程序,通過路由器訪問云服務器上的數據,呈現在手機界面上。
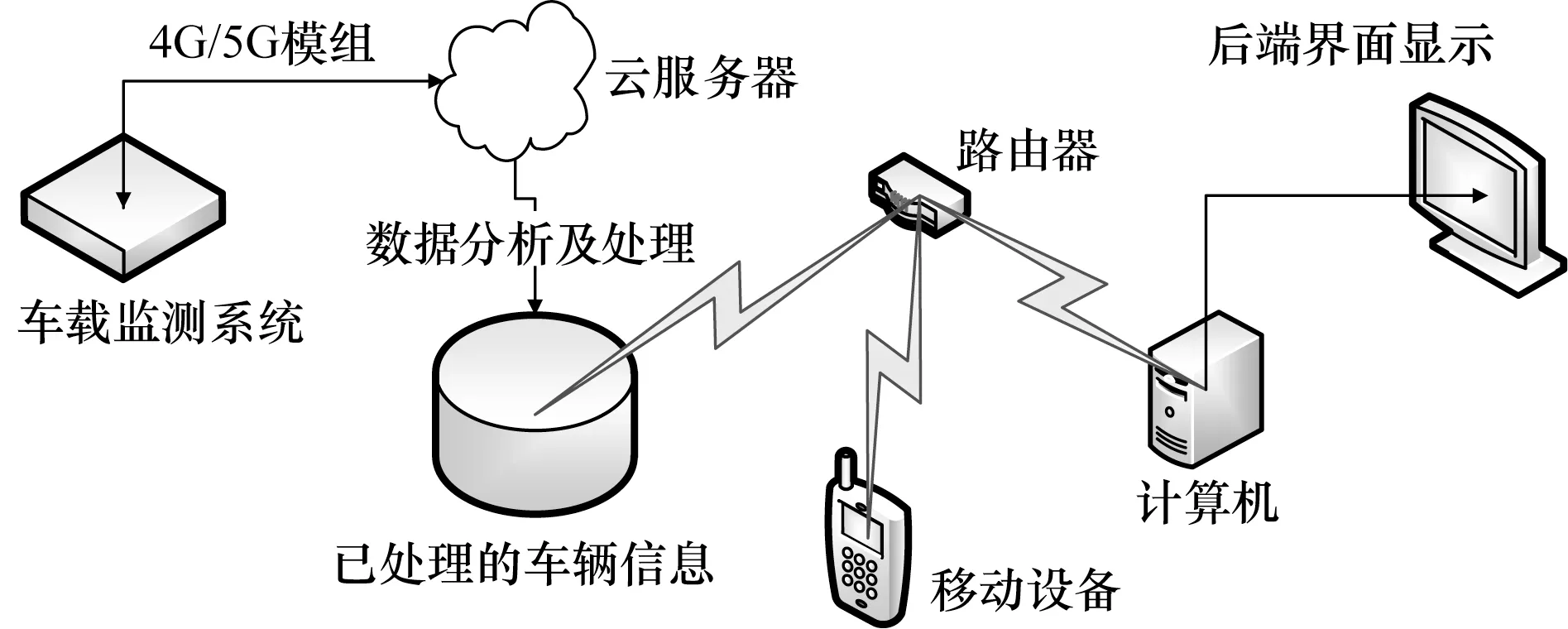
圖4 軟件層結構
3.2 數據分析及處理
基于4G/5G車輛監測系統是基于4G/5G的快速傳輸能力,對車載進行實時的監督,而對于傳輸過來的底層車輛信息,則需要對于做進一步的數據處理,便于后臺管理人員監督,并能將數據簡明的呈現給用戶。因此,對于本系統的數據,則采用了模糊綜合評價法[7]對數據進行評價:
(1)建立了一個因素集U={u1,u2,u3,u4,u5},u1表示司機駕駛的時長,u2表示司機的心率值,u3表示汽車行駛車速,u4表示司機呼出氣體的酒精濃度,u5表示汽車的狀態信息。
(2)建立一個綜合評價的評價集V={v1,v2,v3,v4},v1表示當前車輛駕駛狀態舒適,v2表示當前駕駛狀態良好,v3表示當前車輛駕駛狀態較差,v4表示當前車輛駕駛不適合駕駛應立即停止駕駛。
(3)對每個因素進行單因素評價進而獲得評價矩陣R[8],在對每個單因素進行評價之前會根據車載監測系統上傳的每個因素值進行等級劃分。例如對于駕駛時長在0~2 h為舒適駕駛,2~4 h為駕駛狀態良好,4~5 h為駕駛狀態較差,6 h以上則不適合駕駛,需停止駕駛。假設司機駕駛的時長最多是8 h,則當駕駛時長在0~2 h,(u1,vj)有序對則可能為[0.75,0.125,0.075,0.05]。因為軟件系統會根據駕駛時長t,用1-t/8作為評價為舒適駕駛的值即0.75。再用t/6分別乘以0.7、0.2、0.1得到評價為良好、較差、不適合的值,即(u1,vj)有序對中的0.125、0.075、0.05。
軟件會根據類似的評價體系,對底層傳輸過來的每個因素進行等級劃分,再對每個因素賦予評價值,最后得到一個評價矩陣如下:
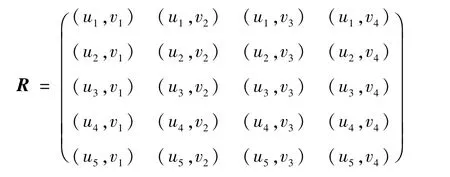
(4)確定每個因素的權重集合,即A={a1,a2,a3,a4,a5},ai越大表示該因素占的比重越大,在本系統中采用的權值集合是{0.15,0.35,0.3,0.2}。
(5)建立一個綜合評價模型,即定義一個模糊向量B,B=A×R={b1,b2,b3,b4},在b1~b4之間取出最大值,該最大值對應的評價就是當前的車輛駕駛狀態。如:b2最大,則當前車輛駕駛狀況良好,可繼續駕駛。
3.3 數據處理結果展示
車載數據在后臺將會顯示車載攝像頭所監控畫面、司機人臉檢測的結果和司機呼出氣體的酒精濃度,以及車速和司機心率隨時間的變化,如圖5所示,車輛駕駛狀態的評價如圖6所示。

圖5 車速和司機心率變化
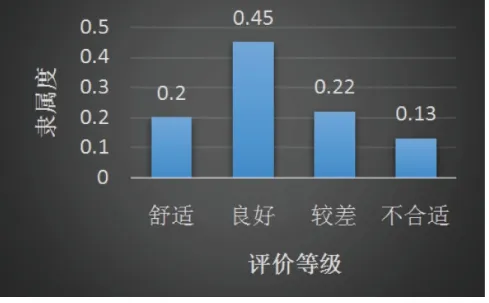
圖6 車輛駕駛狀態的評價
4 結束語
本文研究基于4G/5G的快速傳輸能力,對車輛駕駛狀態信息傳輸,并對車輛數據進行數據處理與分析,實時顯示在后臺管理中心以及用戶的移動設備上;可以實現車輛的監測,避免突發狀況的發生,并可在發生事故后,第一時間報警請求援助來搶救生命。可將其應用于各汽車制造公司,為該公司的汽車提供安全保障。也可應用于出租車公司、公交車公司和長途客車公司。給公司的車輛安裝一套安全系統,能夠實時監測車輛的運行狀態,了解司機的駕駛情況,并針對性地處理,能夠減少事故發生,減少人員和財產的損失。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
石油瀝青(2021年4期)2021-10-14 08:50:44
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
家庭影院技術(2017年9期)2017-09-26 03:41:45
中華手工(2017年2期)2017-06-06 23:00:31
中國教育技術裝備(2015年19期)2015-03-01 02:43:07
中外會展(2014年4期)2014-11-27 07:46:46
俄羅斯問題研究(2012年1期)2012-03-25 09:54:51
體育師友(2012年4期)2012-03-20 15:30:10
