
集裝箱門式起重機(jī)減搖模型及其控制方法解析*
2021-07-14 08:34:50高崇金王鴻博
機(jī)電工程技術(shù) 2021年4期
高崇金,王鴻博
(順德職業(yè)技術(shù)學(xué)院,廣東佛山 528300)
0 引言
軌道式或輪胎式集裝箱門式起重機(jī)主要用于集裝箱鐵路轉(zhuǎn)運(yùn)場和大型集裝箱儲運(yùn)場的集裝箱裝卸、搬運(yùn)和堆放。對碼頭或鐵路貨場的穩(wěn)定運(yùn)行和高效生產(chǎn)有重要意義。
集裝箱門式起重機(jī)由主梁、門腿、運(yùn)行小車、起升機(jī)構(gòu)、大車運(yùn)行機(jī)構(gòu)、電氣系統(tǒng)、操作駕駛室等組成。根據(jù)堆場作業(yè)工藝,在單門腿方向或雙門腿方向外伸懸臂成為單懸臂或雙懸臂機(jī)型,不外伸成為無懸臂機(jī)型。集裝箱門式起重機(jī)起升機(jī)構(gòu)采用鋼絲繩進(jìn)行提升,由于風(fēng)載荷、大車和小車運(yùn)行過程中產(chǎn)生起動(dòng)及制動(dòng)加速度等的作用[1],集裝箱吊具會產(chǎn)生垂直平面內(nèi)搖擺及水平平面內(nèi)扭轉(zhuǎn)振蕩。吊具及集裝箱的晃動(dòng),給吊具旋鎖與集裝箱角配件的精確對中及集裝箱的準(zhǔn)確堆放帶來非常大的困難,無法立即進(jìn)行集裝箱落箱作業(yè),降低了生產(chǎn)效率,延長工作周期。
根據(jù)集裝箱起重機(jī)的作業(yè)流程進(jìn)行分析[2],隨著高度的不斷增加,吊具擺動(dòng)的問題會更加嚴(yán)重。當(dāng)?shù)蹙叱霈F(xiàn)前后方向的晃動(dòng)時(shí),司機(jī)可通過控制小車將其趨于穩(wěn)定。但是,對于順或逆時(shí)針的旋轉(zhuǎn)扭動(dòng),司機(jī)則無計(jì)可施。因此,如何控制集裝箱吊具的擺動(dòng)(即如何使擺動(dòng)迅速減弱,在最短的時(shí)間恢復(fù)到平衡位置),提高起升鋼絲繩使用壽命,提升裝卸效率,成為各廠家展示其設(shè)備效率和技術(shù)優(yōu)勢的主要關(guān)鍵點(diǎn)。
本文針對國內(nèi)某一制造商生產(chǎn)的集裝箱門式起重機(jī)[3-5]減搖系統(tǒng)進(jìn)行研究,通過設(shè)計(jì)改造減小吊具的搖晃與扭動(dòng),從而滿足碼頭集裝箱裝卸作業(yè)要求。從理論分析開始,建立幾何模型和受力模型,將理論數(shù)據(jù)在實(shí)際產(chǎn)品中進(jìn)行驗(yàn)證,得到理想防搖效果,為行業(yè)應(yīng)用提供理論分析依據(jù)。
1 軌道式集裝箱門式起重機(jī)產(chǎn)品及防搖機(jī)構(gòu)
如圖1所示,軌道式集裝箱門式起重機(jī)產(chǎn)品組成包括大車機(jī)構(gòu)、小車總成(由起升機(jī)構(gòu)、運(yùn)行機(jī)構(gòu)和防搖機(jī)構(gòu)等組成)、主機(jī)鋼結(jié)構(gòu)和電氣系統(tǒng)等。在一個(gè)工作循環(huán)中,主要?jiǎng)幼饔写筌囘\(yùn)行、滿載/空載起升、滿載/空載小車運(yùn)行、滿載/空載下放和防搖等。由于產(chǎn)品實(shí)際應(yīng)用和產(chǎn)品結(jié)構(gòu),小車運(yùn)行方向和大車運(yùn)行方向垂直。主要技術(shù)參數(shù)如表1所示。
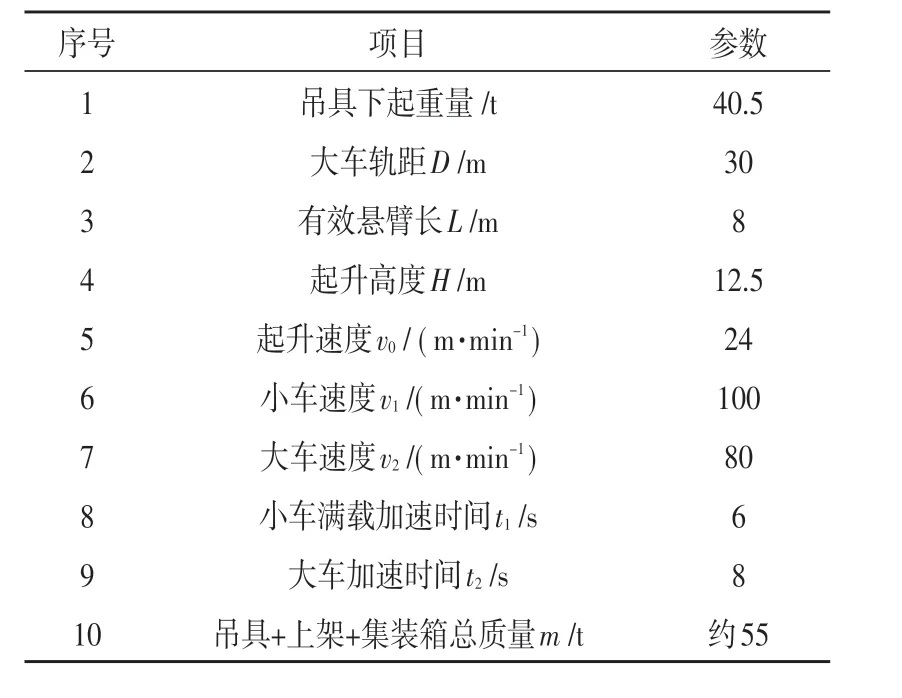
表1 設(shè)備主要技術(shù)參數(shù)Tab.1 Main technical parameters of the equipment
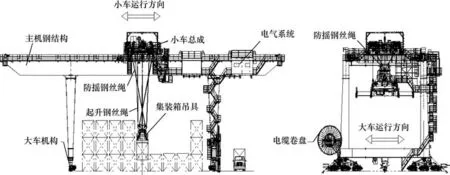
圖1 軌道式集裝箱門式起重機(jī)Fig.1 Rail-mounted container gantry crane
減搖機(jī)構(gòu)總成分布在小車總成中,如圖2所示,a、b、c、d分別代表4個(gè)減搖機(jī)構(gòu)組成,每個(gè)機(jī)構(gòu)均由減搖電機(jī)、絕對值編碼器和鋼絲繩卷筒等組成,可實(shí)現(xiàn)吊具的減搖、回轉(zhuǎn)、平移功能。主要技術(shù)參數(shù)如表2所示。
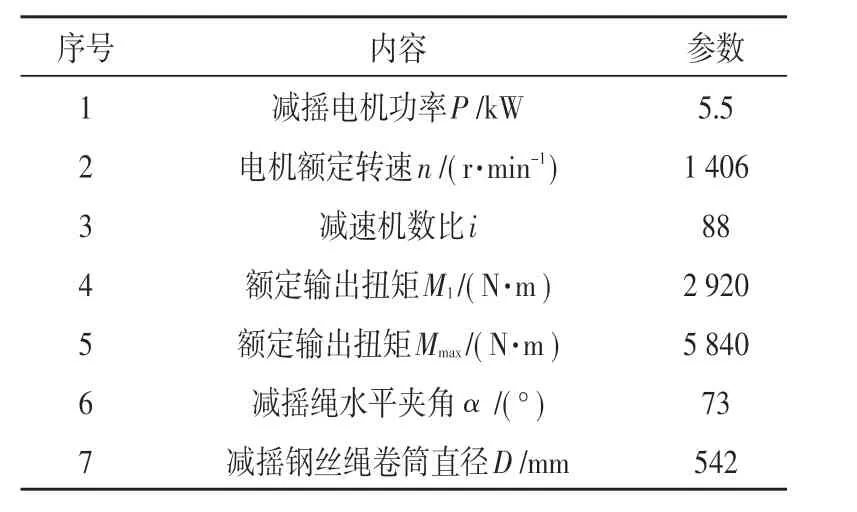
表2 減搖機(jī)構(gòu)主要參數(shù)Tab.2 Main parameters of anti-sway mechanism
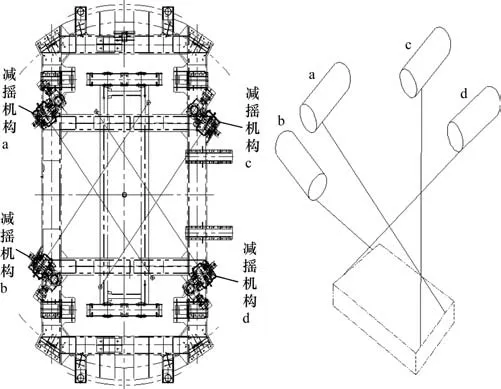
圖2 減搖機(jī)構(gòu)布置及方案Fig.2 Arrangement plan and schematic diagram of anti-rolling mechanism
2 吊具扭角和擺角的幾何模型
由于風(fēng)載荷、大車和小車運(yùn)行過程中產(chǎn)生起動(dòng)及制動(dòng)加速度等的作用,集裝箱吊具將在垂直平面內(nèi)產(chǎn)生來回?fù)u擺及水平平面內(nèi)產(chǎn)生扭轉(zhuǎn)振蕩[6]。吊具在小車方向的擺角,擺動(dòng)角速度,在大車方向的擺角,以及扭角。
2.1 吊具的扭角幾何模型
建立坐標(biāo)系,X軸垂直向下,Y軸為大車運(yùn)動(dòng)方向,Z軸為小車運(yùn)動(dòng)方向。O點(diǎn)為小車上的點(diǎn),B1、B2、B3為吊具上3個(gè)點(diǎn),在一條直線上,其中B2點(diǎn)在O點(diǎn)的正下方位置(在吊具沒有任何搖擺的理想情況下時(shí))。小車的運(yùn)動(dòng)方向垂直于XOY面,大車的運(yùn)動(dòng)方向垂直于XOZ面。
建立空間邊角關(guān)系,如圖3所示。存在兩個(gè)互相垂直的平面小車運(yùn)動(dòng)平面和大車運(yùn)動(dòng)平面,圖中的θ0即為扭角,B1′B3′為產(chǎn)生扭角θ0后的位置。將B1′和B3′投影到X軸,產(chǎn)生B1′x和B3′x。
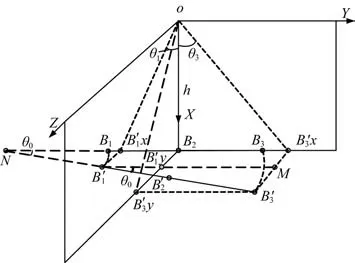
圖3 扭角的空間幾何關(guān)系Fig.3 Schematic diagram of the spatial geometric relationship of twist angles
建立空間幾何關(guān)系。根據(jù)幾何關(guān)系,B3′M與NB3′的夾角也為扭角θ0。
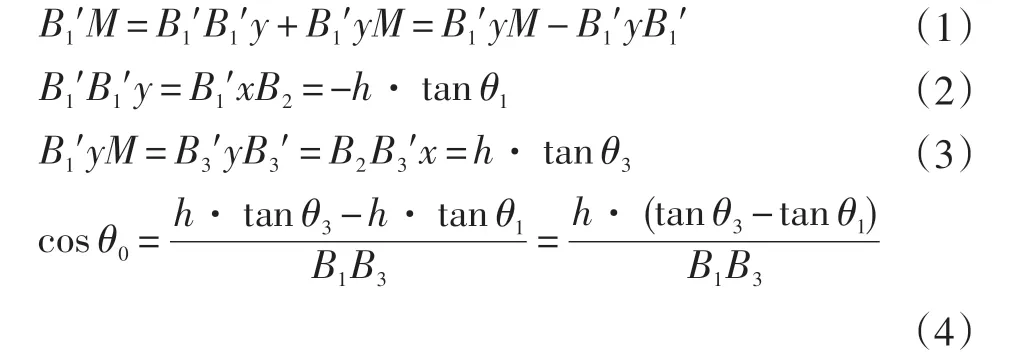
需要注意的是θ3與θ1有正負(fù)角度的。由式(4)得:

式中:h為下面的吊具下降距離d。
實(shí)際應(yīng)用中,B1、B3和h均可作為某一狀態(tài)下的已知條件,根據(jù)公式計(jì)算出θ1和θ3,從而得出扭轉(zhuǎn)角度。
2.2 吊具擺角幾何模型
小車運(yùn)行過程中受起動(dòng)及制動(dòng)加速度等的作用,產(chǎn)生運(yùn)動(dòng)XOZ平面內(nèi)的擺動(dòng)。不考慮小車質(zhì)量和速度對幾何關(guān)系的影響,建立幾何關(guān)系模型,求單擺m的運(yùn)動(dòng)規(guī)律(不考慮其他阻力),時(shí)間t為自變量,未知函數(shù)α(t),逆時(shí)針擺動(dòng)為α的正向,建立如圖4所示的模型[7-9]。
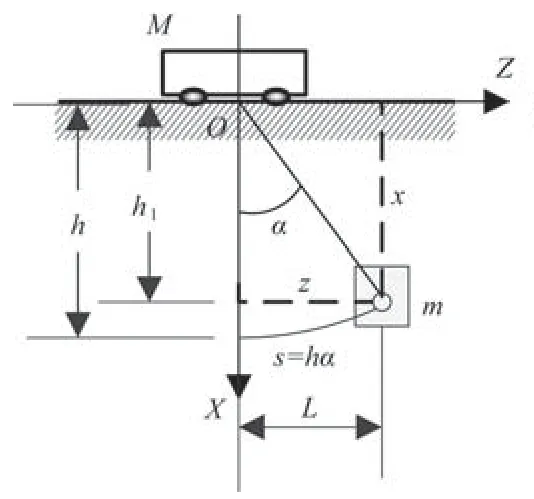
圖4 擺角的幾何關(guān)系Fig.4 Geometric diagram of pen?dulum Angle
質(zhì)量m的約束方程為:
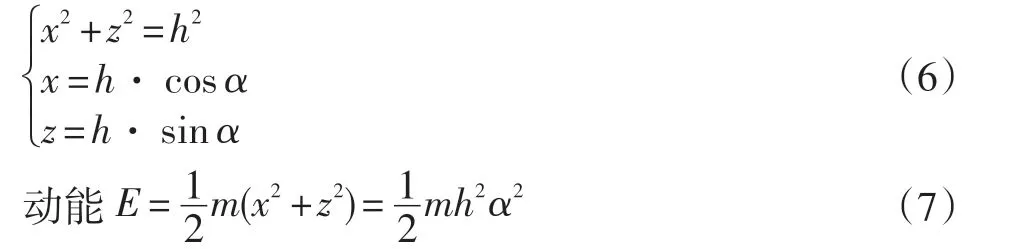
設(shè)坐標(biāo)原點(diǎn)O點(diǎn)處的勢能為0,則勢能:

于是得到拉格朗日函數(shù)為:

根據(jù)以上得到拉格朗日方程為:

即數(shù)學(xué)模型為:

3 力學(xué)模型的建立
車輛在實(shí)際工作過程中,大車基本固定不動(dòng),因此大車的運(yùn)動(dòng)因素在此力學(xué)模型中不考慮,風(fēng)載荷和起升及防搖鋼絲繩的質(zhì)量的影響不考慮,吊具始終在平面做水平運(yùn)動(dòng)。考慮小車運(yùn)行牽引力、吊重的偏擺及小車與軌道間的摩擦阻力等,得出如圖5所示的吊具擺動(dòng)的簡化力學(xué)模型。
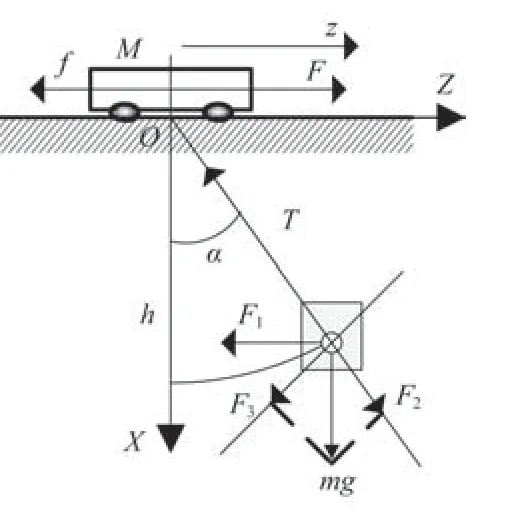
圖5 力學(xué)模型的建立Fig.5 Establishment of mechan?ical model
根據(jù)動(dòng)力學(xué)平衡原理,小車M在水平方向的受力:

式中:M為小車質(zhì)量;m為吊重質(zhì)量;h為起升鋼絲繩的長度;Z為小車XOZ平面內(nèi)水平位移;α為吊重偏離豎直方向擺角;F為小車運(yùn)行牽引力;f為小車運(yùn)行阻力;g為重力加速度(9.8 m/s2);T為鋼絲繩拉力。
根據(jù)達(dá)朗伯原理,分析吊重m,在水平方向建立力學(xué)平衡方程:

式中:F3為切向慣性力,F(xiàn)2為法向慣性力,F(xiàn)1為水平慣性力,
以上代入式(11)~(12)整理得:

在切線方向建立力學(xué)平衡方程:

整理得:

綜合以上,小車線性模型為:
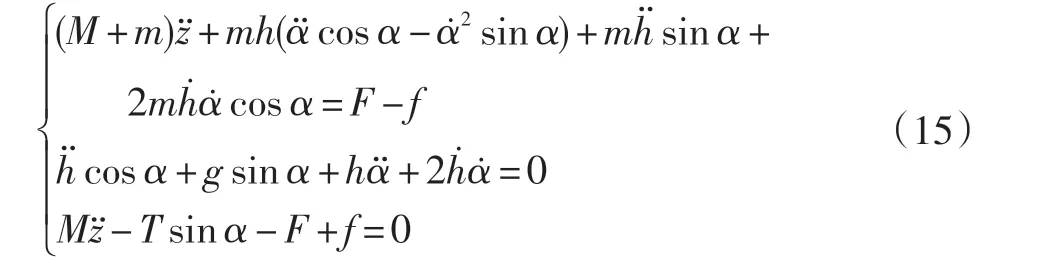
因?yàn)樵谛≤囘\(yùn)行過程中,吊具必須起吊到一定高度,且起升機(jī)構(gòu)處于制動(dòng)狀態(tài),鋼絲繩變化量為0,故。又在0點(diǎn)位置角度變化α→0,得到sinα=0,cosα=1,
方程簡化為:

即在某一時(shí)間t,小車吊具系統(tǒng)有:

由此可以看出,吊具的角加速度α?、角速度α?和小車的加速度z?(t)成正比關(guān)系。小車的運(yùn)行速度z?(t)可通過安裝在小車車輪處的絕對值編碼器來確定。根據(jù)此速度輸入量,即可得到單位時(shí)間內(nèi)的加速度z?(t),即可得到集裝箱及吊具擺動(dòng)的運(yùn)動(dòng)規(guī)律。
根據(jù)圖3~4,如何控制吊具在起重機(jī)運(yùn)行過程中的θ0和α為主要研究內(nèi)容。本文將從吊具的機(jī)械防搖和電氣設(shè)計(jì)控制兩個(gè)層面進(jìn)行。
4 防搖控制
4.1 機(jī)構(gòu)介紹
根據(jù)表1~2中小車滿載速度、加速時(shí)間、大車速度和加速時(shí)間等參數(shù),已知小車在Z方向的速度為100 m/min,則有:

式中:v為小車車速;a為加速度;t為時(shí)間。
根據(jù)式(18)得出小車加速度a=0.277 m/s2。
根據(jù)表2中的參數(shù),計(jì)算減搖機(jī)構(gòu)額定輸出的拉力:

式中:M為額定轉(zhuǎn)矩;F為減搖鋼絲繩拉力;D為卷筒直徑。
得出減搖鋼絲繩額度輸出拉力為:

某一方向矢量上的最大輸出拉力:

水平方向的額度拉力:

式中:β 為 吊具在最低端時(shí),減搖鋼絲繩與水平面的夾角。
根據(jù)表1,滿載狀態(tài)下負(fù)載按55 t計(jì)算,防搖鋼絲繩水平拉力產(chǎn)生的最大加速度為:

根據(jù)式(18),小車加速產(chǎn)生的水平加速度a1=0.277 m/s2。根據(jù)幾何模型,得出最低位置的擺動(dòng)角度為a3=g·tanη,得η≈1.6°。
產(chǎn)品實(shí)際最低位置防搖鋼絲繩長度為h≈16.8 m,則高度變化為:

因?yàn)榈蹙咴谶\(yùn)行過程中,防搖鋼絲繩隨著吊具的擺動(dòng)而做功,根據(jù)能量守恒定律,有:

吊具的擺動(dòng)過程中-1.6°~1.6°,1個(gè)周期內(nèi)的減搖鋼絲繩行程變化為4次,單次37 mm。據(jù)此可計(jì)算吊具擺動(dòng)1/4周期的次數(shù):

綜合以上,當(dāng)防搖鋼絲繩輸出最大扭矩時(shí),全周期循環(huán)次數(shù)為1.1,可快速實(shí)現(xiàn)集裝箱的精準(zhǔn)對對位,滿足集裝箱裝卸要求。即吊具擺動(dòng)可在1.5個(gè)周期內(nèi)達(dá)到靜止?fàn)顟B(tài),優(yōu)于行業(yè)產(chǎn)品0.5個(gè)周期以上。
4.2 電氣控制系統(tǒng)方案
如圖6所示,電氣控制系統(tǒng)主要由絕對值編碼器、減搖變頻器、重量信號和PLC等組成,系統(tǒng)通過起升部分的絕對編碼器測得吊具的高度,實(shí)時(shí)判斷其所處的工況位置[11-12]。
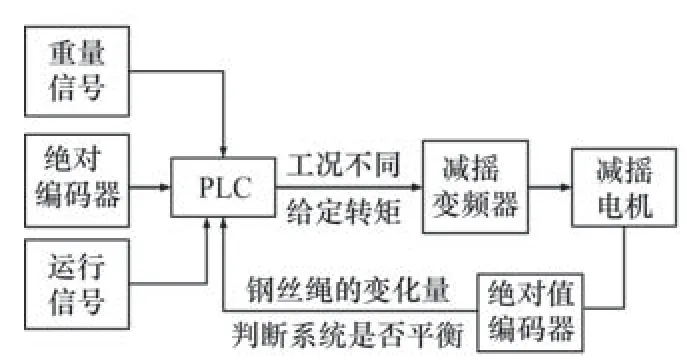
圖6 控制系統(tǒng)Fig.6 Schematic diagram of control system
根據(jù)起重機(jī)實(shí)際負(fù)載,利用通過重量傳感器收集到起升載荷,與額定重量相除,再乘以滿載時(shí)所需拉力,得到實(shí)際所需拉力,通過PLC控制各減搖電機(jī)變頻器,如圖7所示。通過力矩輸出方式達(dá)到所需的減搖鋼絲繩拉力及長度變化。
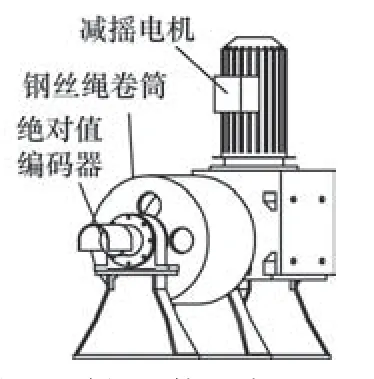
圖7 減搖機(jī)構(gòu)組成Fig.7 Composition of anti-sway mechanism
5 結(jié)束語
本文針對集裝箱防搖,建立了理論幾何模型,通過減搖鋼絲繩對吊具施加牽引力從而抑制吊具擺動(dòng)[13],消除其擺動(dòng)動(dòng)能,工作全過程中將吊具擺動(dòng)幅度抑制在安全范圍內(nèi),達(dá)到減搖的目標(biāo)。建立吊具扭角和擺角的幾何模型,根據(jù)拉格朗日方程建立減搖機(jī)構(gòu)受力模型,準(zhǔn)確地描述吊具擺動(dòng)及防搖過程,根據(jù)參數(shù)得出實(shí)際數(shù)據(jù)。采取該防搖策略,吊具可在1.5個(gè)周期內(nèi)達(dá)到靜止?fàn)顟B(tài),實(shí)現(xiàn)了吊具擺幅減至安全擺動(dòng)范圍這一目標(biāo),優(yōu)于行業(yè)產(chǎn)品0.5個(gè)周期以上。
另針對性地對電氣控制系統(tǒng)進(jìn)行設(shè)計(jì),將被動(dòng)防搖通過控制實(shí)現(xiàn)主動(dòng)預(yù)判和防搖,大大降低吊具在使用過程中的擺動(dòng)幅度,并提升了產(chǎn)品的工作效率和安全性,驗(yàn)證了方案的實(shí)用性,獲得良好的使用效果。根據(jù)理論計(jì)算得出產(chǎn)品在實(shí)際過程中的最大擺動(dòng)角度和最大水平力,為行業(yè)提供設(shè)計(jì)理論依據(jù)。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
計(jì)算機(jī)應(yīng)用(2022年2期)2022-03-01 12:33:42
計(jì)算機(jī)應(yīng)用(2022年1期)2022-02-26 06:57:42
計(jì)算機(jī)應(yīng)用(2021年4期)2021-04-20 14:06:36
計(jì)算機(jī)應(yīng)用(2021年3期)2021-03-18 13:44:48
計(jì)算機(jī)應(yīng)用(2021年1期)2021-01-21 03:22:38
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
