時(shí)間分割圓弧插補(bǔ)算法的改進(jìn)
2021-07-15 02:49:08梁曉兵劉志強(qiáng)王璠
機(jī)械工程師 2021年7期
梁曉兵,劉志強(qiáng),王璠
(河南機(jī)電職業(yè)學(xué)院,鄭州 451191)
0 引言
目前數(shù)控系統(tǒng)在插補(bǔ)圓弧的過(guò)程中,使用的基本上都是二階近似法進(jìn)行圓弧插補(bǔ)的,這種方法使用一組直線來(lái)逼近圓弧,計(jì)算出插補(bǔ)周期的坐標(biāo)增量值。目前國(guó)內(nèi)外很多學(xué)者已經(jīng)在這方面進(jìn)行了很多研究,韓賽飛等[1]實(shí)現(xiàn)了改進(jìn)型圓弧插補(bǔ)算法及FPGA實(shí)現(xiàn);劉煥等[2]分析了基于微分模型的空間圓弧與橢圓弧插補(bǔ)算法;姚曉通等[3]分析了圓弧插補(bǔ)算法的FPGA實(shí)現(xiàn);李偉光等[4]分析了無(wú)限直線逼近圓弧方法;劉鵬飛等[5]分析了在機(jī)器人領(lǐng)域中的應(yīng)用;何均等[6]實(shí)現(xiàn)了短線段空間圓弧轉(zhuǎn)接與插補(bǔ);劉放等[7]介紹了基于四元數(shù)的空間圓弧插補(bǔ)算法;王中平等[8]基于矢量分析了圓弧插補(bǔ)算法;詹泳等[9]實(shí)現(xiàn)了五軸空間圓弧插補(bǔ);朱國(guó)力等[10]介紹了插補(bǔ)算法的應(yīng)用;賀德華等[11]推導(dǎo)了空間任意圓弧的插補(bǔ)算法;高宏卿等[12]推導(dǎo)了空間圓弧變換插補(bǔ)原理與算法。
在計(jì)算過(guò)程中,傳統(tǒng)插補(bǔ)算法使用了三角函數(shù)的泰勒展開式中的低階近似,使得插補(bǔ)點(diǎn)遠(yuǎn)離圓弧,產(chǎn)生一定的累積誤差。針對(duì)這種情況,提出一種改進(jìn)的圓弧插補(bǔ)算法,進(jìn)一步提高插補(bǔ)運(yùn)算精度。
1時(shí)間分割法插補(bǔ)原理
現(xiàn)以第一象限逆時(shí)針插補(bǔ)為例,說(shuō)明傳統(tǒng)時(shí)間分割法實(shí)現(xiàn)原理。如圖1所示,設(shè)待插補(bǔ)圓弧半徑為R,圓心坐標(biāo)(0,0),插補(bǔ)速度為F,插補(bǔ)周期為T,每次插補(bǔ)的進(jìn)給步長(zhǎng)f=F·T。

圖1 圓弧逆時(shí)針插補(bǔ)兩點(diǎn)位置關(guān)系
對(duì)圓弧上動(dòng)點(diǎn)Pi(xi,yi),滿足以下關(guān)系:
yi=R·sinα;xi=R·cosα。
Pi+1(xi+1,yi+1)是下一插補(bǔ)點(diǎn)坐標(biāo),PiPi+1是每插補(bǔ)周期的進(jìn)給步長(zhǎng)f,其對(duì)應(yīng)的圓心角是θ。
下一插補(bǔ)點(diǎn)坐標(biāo)值計(jì)算方法為
yi+1=R·sin(α+θ);xi+1=R·cos(α+θ)。
展開后得:

對(duì)其中的三角函數(shù)泰勒展開并取二階以下變量公式可得:
cosθ≈1-θ2/2;sinθ≈θ。
且由θ=f/R,代入式(1)、式(2),可得:

設(shè)A=f/R=θ,B=θ2/2,代入式(3)、式(4),可得:

取Δyi=y(tǒng)i+1-yi=-B·yi+A·xi;Δxi=xi+1-xi=-B·xi-A·yi。

弓高誤差δ計(jì)算公式為

2 時(shí)間分割法改進(jìn)算法
上面?zhèn)鹘y(tǒng)的時(shí)間分割法圓弧插補(bǔ)運(yùn)算,引入了近似計(jì)算,存在一定的誤差,而且弓高誤差較大,為了減小誤差,下面提出一種改進(jìn)的時(shí)間分割圓弧插補(bǔ)改進(jìn)方法。
2.1 改進(jìn)算法原理
對(duì)于有一定誤差的待加工面(如圖2),如果實(shí)際加工面位于理論待加工面單側(cè),那么最大誤差就是實(shí)際加工最大尺寸減去理論加工面尺寸。如果實(shí)際加工面位于理論待加工面兩側(cè),那么,最大誤差就是理論面和實(shí)際面兩側(cè)尺寸差的最大值,如果兩面對(duì)稱,最大誤差就是實(shí)際誤差的一半。

圖2 待加工面
2.2 算法實(shí)現(xiàn)
對(duì)于給定的弓高誤差δ和圓弧半徑R,分別做半徑為R-δ/2、R+δ/2圓弧,已知Pi(xi,yi)點(diǎn),求下一插補(bǔ)點(diǎn)Pi+1(xi+1,yi+1)坐標(biāo)。過(guò)Pi點(diǎn)做內(nèi)圓弧的切線交半徑為R-δ/2內(nèi)圓弧于切點(diǎn)P(xq,yq)點(diǎn),如圖3所示。
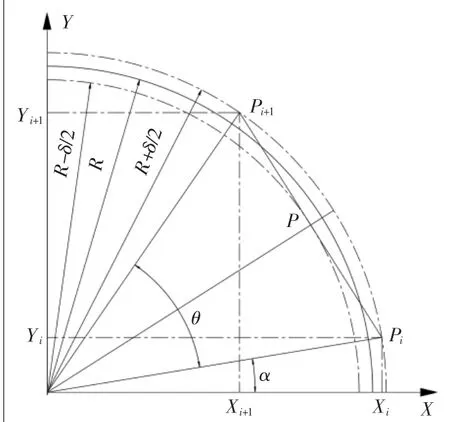
圖3 改進(jìn)算法逆時(shí)針插補(bǔ)點(diǎn)位置關(guān)系
由于P點(diǎn)是切點(diǎn),PPi是內(nèi)圓弧切線,且PPi長(zhǎng)度值為f/2,由幾何關(guān)系可得:

代入式(10)、式(11),可以求得P(xq,yq)坐標(biāo)為:

根據(jù)圖3幾何關(guān)系,P(xq,yq)為Pi(xi,yi)點(diǎn)和Pi+1(xi+1,yi+1)連線的中點(diǎn),可知:

聯(lián)立式(12)~式(15),可得:

Δyi=yi+1-yi,Δxi=xi+1-xi,改進(jìn)后的時(shí)間分割圓弧插補(bǔ)算法的計(jì)算步驟如下。
2.3 特殊點(diǎn)處理
由于上面為了減小誤差,改進(jìn)了算法,計(jì)算過(guò)程中插補(bǔ)的點(diǎn)都在半徑為R+δ/2圓弧上,由此引入了2個(gè)特殊點(diǎn)即起點(diǎn)P0(x0,y0)和終點(diǎn)Pe(xe,ye),這兩個(gè)特殊點(diǎn)需要特殊處理。
對(duì)于起點(diǎn)P0(x0,y0),給定的起點(diǎn)坐標(biāo)位于半徑為R的圓弧上,實(shí)際插補(bǔ)計(jì)算的起點(diǎn)位于半徑為R+δ/2的圓弧上,因此需要計(jì)算插補(bǔ)起點(diǎn)Pc0(xc0,yc0)。
根據(jù)圖3幾何關(guān)系得:

對(duì)于終點(diǎn)坐標(biāo)Pe(xe,ye),實(shí)際需要的終點(diǎn)坐標(biāo)位于半徑為R圓弧上,實(shí)時(shí)插補(bǔ)計(jì)算的終點(diǎn)位于半徑為R+δ/2圓弧上,因此需要計(jì)算實(shí)際終點(diǎn)Pea(xea,yea)。根據(jù)圖3的幾何關(guān)系可得:

3 兩種算法比較分析
在傳統(tǒng)算法中,由于對(duì)正弦余弦三角函數(shù)進(jìn)行了二階近似,由式(5)、式(6)求得的下一插補(bǔ)點(diǎn)可能會(huì)偏離圓弧產(chǎn)生徑向誤差。插補(bǔ)過(guò)程中由于使用了弦線代替圓弧,還會(huì)產(chǎn)生弓高誤差。
在改進(jìn)算法中,由于使用R+δ/2的圓弧代替半徑為R的圓弧,同樣會(huì)產(chǎn)生徑向誤差和弓高誤差。
3.1 徑向誤差
徑向誤差即實(shí)際插補(bǔ)點(diǎn)坐標(biāo)與理論坐標(biāo)點(diǎn)的偏差,實(shí)際計(jì)算根據(jù)實(shí)際插補(bǔ)點(diǎn)坐標(biāo)的坐標(biāo)值與理論半徑的距離來(lái)表示:

由式(5)、式(6)可得傳統(tǒng)插補(bǔ)算法徑向誤差為




由于θ不為0,δci也不等于0,即存在徑向誤差,而且隨著插補(bǔ)次數(shù)的增加,徑向誤差也會(huì)越來(lái)越大。
對(duì)于改進(jìn)后的算法,由圖3幾何關(guān)系得

由式(16)、式(17)、式(19)得

代入式(18),可得

經(jīng)過(guò)改進(jìn)后,算法誤差是恒定值,和插補(bǔ)次數(shù)無(wú)關(guān),誤差不累計(jì),可以在預(yù)插補(bǔ)階段進(jìn)行誤差補(bǔ)償一個(gè)恒定值,進(jìn)一步減小誤差。
3.2 弓高誤差

3.3 插補(bǔ)速度
在傳統(tǒng)得插補(bǔ)算法中,使用了二階近似來(lái)簡(jiǎn)化計(jì)算過(guò)程,改進(jìn)算法沒(méi)有采用近似處理,一方面是因?yàn)楝F(xiàn)在嵌入式系統(tǒng)計(jì)算能力越來(lái)越強(qiáng),比如STM32等微控制器都帶了硬件除法器;另一方面是因?yàn)楸靖倪M(jìn)算法在插補(bǔ)過(guò)程中和傳統(tǒng)插補(bǔ)算法過(guò)程一樣,除了常量系數(shù)計(jì)算不一樣,常量系數(shù)計(jì)算過(guò)程可以放到插補(bǔ)預(yù)處理階段進(jìn)行,而且改進(jìn)算法比傳統(tǒng)算法只多了一步除法運(yùn)算。在168 MHz的STM32f407芯片上進(jìn)行插補(bǔ)系數(shù)計(jì)算仿真,結(jié)果測(cè)得傳統(tǒng)算法每次實(shí)際計(jì)算時(shí)間為0.148μs,改進(jìn)后插補(bǔ)時(shí)間為0.369μs,時(shí)間基本一致。
綜上,傳統(tǒng)算法徑向誤差隨插補(bǔ)次數(shù)的增加不斷增加,改進(jìn)算法后,徑向誤差不隨插補(bǔ)次數(shù)變化而變化,穩(wěn)定無(wú)變化。弓高誤差傳統(tǒng)算法為f2/(8R),改進(jìn)后算法誤差為f2/(16R),只是傳統(tǒng)算法誤差的一半。由于徑向誤差和弓高誤差在相反方向,最大誤差為徑向誤差和弓高誤差的最大值。改進(jìn)后算法最大誤差為f2/(16R),只是傳統(tǒng)算法誤差的一半。
4 結(jié)語(yǔ)
通過(guò)對(duì)時(shí)間分割圓弧插補(bǔ)算法和改進(jìn)后的算法對(duì)比計(jì)算分析,可知改進(jìn)算法的誤差要比原來(lái)的算法誤差減小一半,精度得到了很大提高。改進(jìn)后插補(bǔ)過(guò)程運(yùn)算速度相同,插補(bǔ)系數(shù)計(jì)算相對(duì)低一些,但是誤差不到1μs,滿足實(shí)時(shí)插補(bǔ)要求。