天線指向機構減振設計與試驗研究
2021-07-15 02:48:48劉寬耀莊春躍劉偉平朱駿劉洪生
機械工程師 2021年7期
劉寬耀,莊春躍,劉偉平,朱駿,劉洪生
(上海無線電設備研究所,上海 200240)
0 引言
天線指向機構是星載合成孔徑雷達的重要組成部分,要實現對地面條帶進行成像,需保證天線波束指向地面條帶中心,并且保持波束在水平面的投影與條帶中心線的角度不變[1]。天線在掛飛試驗中受到發動機振動、姿態變化、風阻力矩等一系列復雜振動,天線指向的低頻抖動會引起多普勒頻譜的微小變化,從而使多普勒中心頻率估計產生誤差,進而引起圖像位置的偏移,惡化成像質量[1]。因此,需將減振設計技術運用到天線指向機構設計中,以實現穩定的天線指向。
隨機振動條件下指向機構隔振技術一直是振動領域的研究熱點。李林等[2]采用減震器并聯的方式,設計并優化了一套被動隔振系統,光電指向機構主振方向隔振效率達75%。宋科[3]針對傳統無人機穩定云臺結構穩定性不佳而難以高質量成像問題,對云臺結構材料選擇、結構設計及載荷位置等方面進行研究,實現對位移振動做出補償。YANG等[4]基于魯棒控制在光電指向機構上引入特定的額外干擾,此方法可有效地估計參數不確定性的輸入擾動量,提高平臺的穩定性。SUN等[5]提出一種主被動隔離復合的光電指向機構,外框采用主被動復合隔離器,內框用高阻尼干摩擦阻尼器,這套系統滿足設計要求,但剛度不足。李運動等[6]根據某型光電系統工況,開展減震器匹配設計,有效隔離中高頻振動,使成像質量得到很大提高。鄭鳳翥等[7]針對現有內置橡膠減振系統的諸多不足,采用金屬減震器,設計出一款適用于機載光電設備的外置型隔振系統,滿足穩定精度要求。朱石堅[8]發現控制帶寬受結構固有頻率、電動機特性及陀螺帶寬制約,目前小于25 Hz,因此需采用被動隔振方式抑制20~500 Hz及以上的振動擾動。
綜上所述,目前指向機構的減振研究主要針對的是光電系統,尚未有對星載合成孔徑雷達的發射天線指向機構和接收天線指向機構進行同步減振的物理驗證。本文基于減振系統設計理論,對天線指向機構開展減振設計,對比分析了同工況條件下有無減振系統的天線穩定性差異,為后續衛星載荷上天可靠工作奠定了基礎。
1 減振系統設計理論
減振系統力學模型因工程實際不同而復雜多樣,但是典型的單自由度系統的強迫振動模型是大多數減振問題的基礎。基于以下假設:1)產品的中心處于減震器的彈性中心;2)產品剛度比減震器要大很多,產品近似為剛體。
單自由度彈簧-質量-阻尼系統的基本力學模型如圖1[6]所示。

圖1 單自由度系統的力學模型
設作用在系統上的激勵是簡諧函數,x1=A sinωt,則質量體m的運動微分方程為

設式(1)的特解為

將式(2)代入式(1)整理后,得到傳遞率T,表示被動隔振效果,定義為減振后產品的振動幅值與外界振源幅值之比,則其傳遞率為

傳遞率T與頻率比λ、阻尼比ζ有關,三者關系曲線如圖2所示。
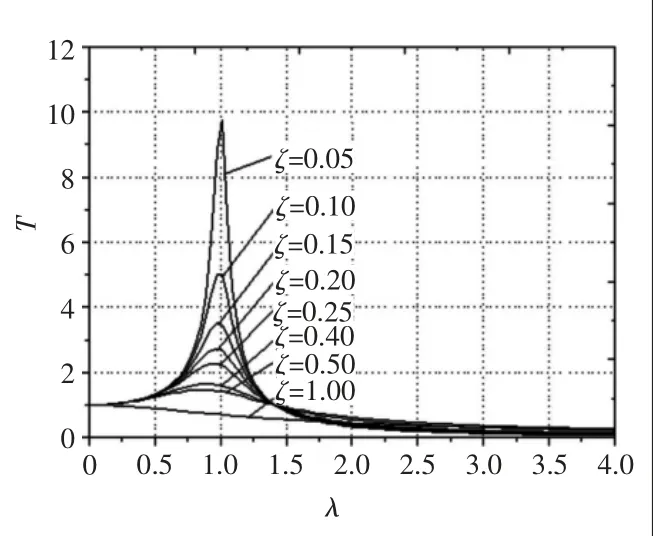
圖2 阻尼、頻率比、傳遞率關系圖
2 天線指向機構減振系統設計
依據指向機構減振需求和減振設計理論,天線指向機構系統減振原理圖如圖3所示,由機體、減震器、安裝板、指向機構、天線、支撐棒、保護罩構成,轉接板安裝在飛機內艙底板上,減震器分布在轉接板上,減震器上方放上安裝板,支撐棒穿過飛機底部方槽延伸到艙外并連接起兩塊安裝板,指向機構吊在下安裝板下,天線安裝在指向機構上,同時保護罩通過支撐棒吊在下安裝板上,實現對天線指向機構的整體減振。圖3中,X軸定義為飛行器橫滾軸,Y軸定義為飛行器俯仰軸,Z軸定義為飛行器方位軸,三軸符合笛卡爾坐標規則。
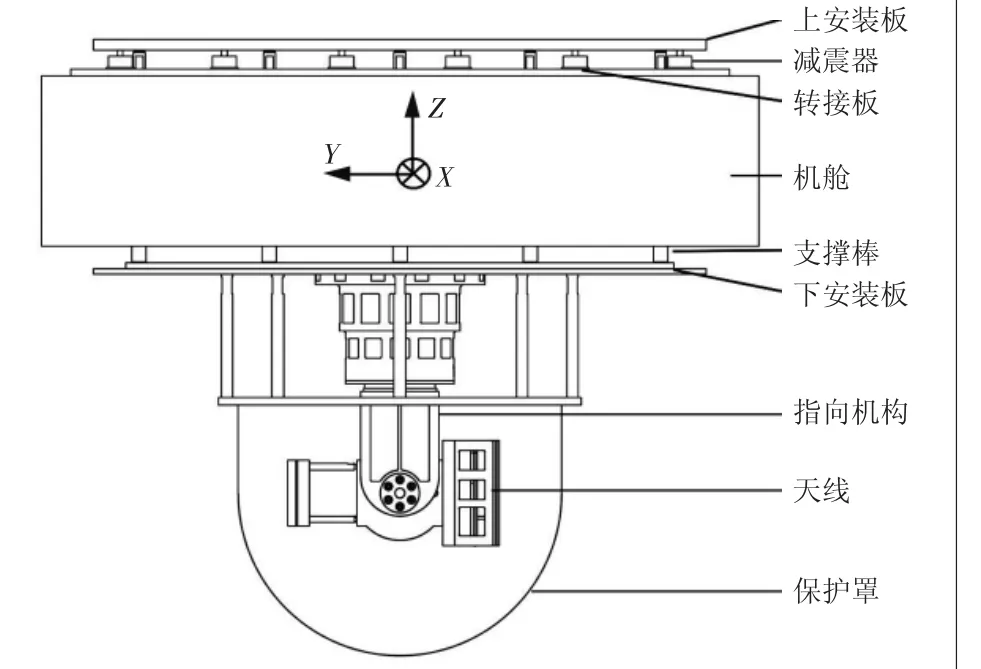
圖3 天線指向機構減振原理圖
由以上減振系統分析可知,減震器圍繞質心均勻分布,且指向機構質心低于減震器支點所在平面,減振系統動力學示意圖如圖4所示,指向機構在Z方向上的平移運動與指向機構關于Y軸的轉動存在耦合,在Y方向上的平移運動與指向機構關于X軸的轉動存在耦合,其他運動模態之間無耦合。由于質心偏離距離與指向機構轉動慣量比值不大,可以忽略,因此振動耦合對系統的影響較低。

圖4 減振系統動力學示意圖
根據天線指向機構系統總質量,擬采用10個減震器并聯方案,每個減震器承受的質量為8 kg。
載機的振動頻帶為20~2000 Hz,其振動環境由寬帶隨機譜迭加窄帶尖峰所組成,則初步選定減震器固有頻率小于20 Hz。
根據工程經驗,頻率比λ取2,不失一般性,取阻尼比ζ=0.3,由式(3)可得共振情況下減振系統傳遞率T=2.27。
天線指向機構處于載機環境時,在諧振頻率處等效加速度響應(3σ)[6]為

式中:Si為諧振頻率處輸入隨機振動功率譜密度;fn為減震器固有頻率。
加速度引起的減振系統運動變形為

將相關參數代入式(4)與式(5)可得減振系統運動變形為5.18 mm。
基于上述參數,并結合體積空間、耐腐蝕性等要求,優選全向減震器CBA8,減震器的性能參數如表1所示。

表1 減震器性能參數
全向減震器內部結構圖如圖5所示,由軸、外殼、底座、橡膠球、頂板構成,軸的底部包裹球狀橡膠,與外殼、頂板、橡膠球接觸,通過接觸副摩擦和橡膠球的變形可實現三個方向的振動隔離,且三個方向上的固有頻率相同或者相近,故全向減震器又稱為三向等剛度減震器。

圖5 減震器結構圖
3 減振系統試驗驗證
3.1 指向機構減振試驗系統
如圖6所示,指向機構減振試驗系統由天線指向機構控制系統和振動監測系統兩部分組成。

圖6 振動試驗測試系統
天線指向機構控制系統由控制盒、慣導、計算機構成,慣導安裝在振動臺上,模擬載機平臺運動,系統處于半捷聯模式。穩定精度指在載機擾動環境下,指向機構進入慣性穩定后的穩態角度誤差[7]。穩定精度的測量方法如下:指向機構通電,先使系統處于預定回路工作狀態,并使方位、俯仰預定角度為零,然后使方位、俯仰角速度預定值為零,使系統處于穩定回路工作狀態,記錄方位位置和俯仰位置反饋角,計算穩態角度誤差。
振動監測系統如圖6所示,包含振動臺、功率放大器、計算機、數據采集儀及加速度傳感器。試驗中天線指向機構安裝在振動臺上,振動臺面及轉接板上粘3個加速度傳感器,作為振動輸入控制,以三點的加速度平均信號來控制振動臺。指向機構上固定1個加速度傳感器,監測振動響應譜。激勵振動譜為國軍標規定的梯形譜,梯形譜功率譜密度為0.03 g2/Hz。
3.2 振動特性測試與分析
圖7為X向、Y向、Z向隨機振動響應曲線,天線指向機構加裝三向等剛度減震器后,X向監測點處振動能量由減振前的3.29g減小到減振后的0.54g,Y向監測點處振動能量由減振前的2.65g減小到減振后的0.73g,Z向監測點處振動能量由減振前的2.19g減小到減振后的0.5g,三個方向都表現出較好的減振效果。

圖7 三個方向振動響應曲線
天線指向機構加裝三向等剛度減震器后,X向和Y向的固有頻率均為24 Hz,與減振系統在X向和Y向對稱性有關,Z向由于組合形式的影響,固有頻率為28 Hz,減振系統具有較低的固有頻率。
天線指向機構加裝三向等剛度減震器后,X向、Y向、Z向共振點附近的曲線比較陡峭,說明共振放大區頻帶窄,易避開干擾頻率點。
加裝三向等剛度減震器后,曲線整體上呈衰減趨勢,說明高頻振動減振較為明顯。
3.3 穩定精度測試與分析
圖8~圖10分別為X向、Y向、Z向天線指向機構在不安裝三向等剛度減震器和安裝三向等剛度減震器情況下方位和俯仰的穩態方位和俯仰位置反饋角曲線圖。為了更直觀地對比分析穩定精度,列出X向、Y向、Z向穩態角度誤差,如表2所示。從表2中可看出,X向方位向標準差由減振前的0.0328減小到減振后的0.0065,數值上減少了80.2%,俯仰向標準差由減振前的0.2826減小到減振后的0.0109,數值上減少了96.1%,說明安裝三向等剛度減震器后天線指向機構兩個方向的穩態誤差大幅減小,穩定精度明顯提升,且X向俯仰向標準差降低幅度比方位向大,說明減震器對俯仰向穩定精度貢獻偏大;Y向和Z向穩態角度誤差變化趨勢與X向相同。

圖8 X向位置反饋角
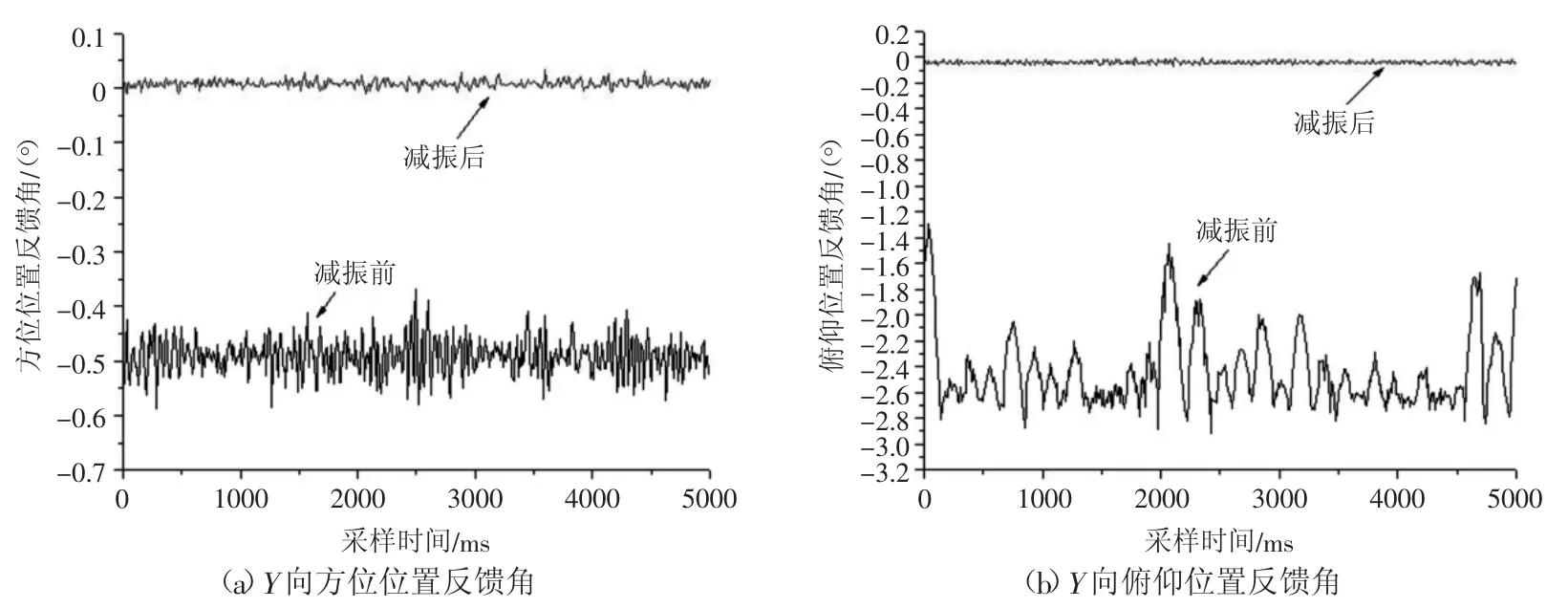
圖9 Y向位置反饋角
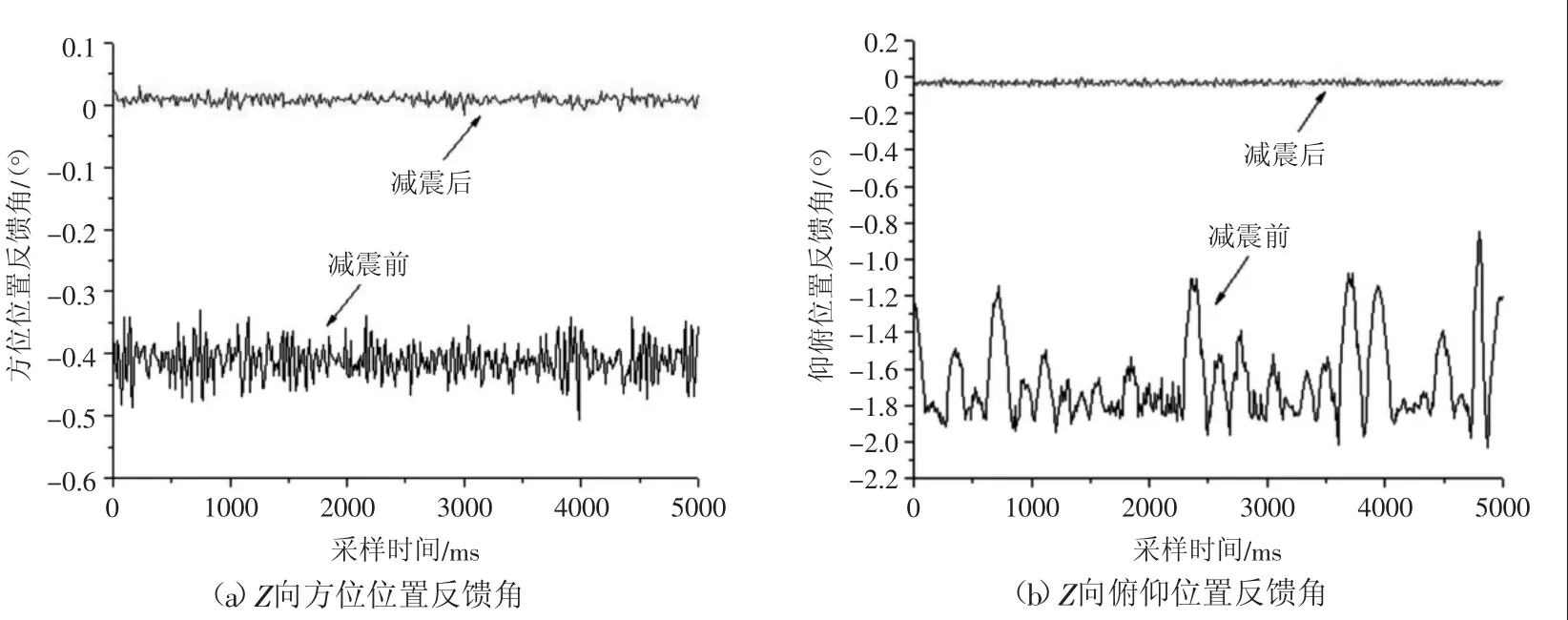
圖10 Z向位置反饋角
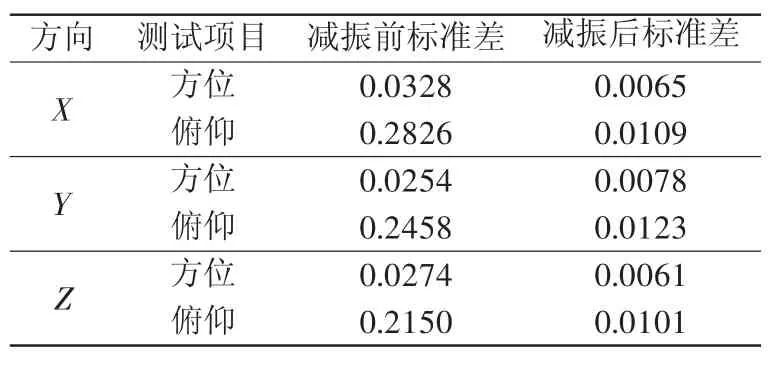
表2 三個方向穩態角度誤差
安裝三向等剛度減震器后,方位向標準差比俯仰向小,方位向穩定精度更高。
4 結語
本文根據天線指向穩定性需求,利用減振系統設計理論,合理選擇了頻率比和阻尼系數,為天線指向機構設計了一組三向等剛度減震器,并對減震器進行了合理的布局,搭建了減振系統測控平臺。對比分析了同工況條件下有無減振系統的天線穩定性差異。振動響應結果表明,天線指向機構加裝三向等剛度減震器后,系統固有頻率低,半功率帶窄,高頻減振明顯,整體減振效果好。穩定精度測試表明,加裝三向等剛度減震器后,俯仰和方位向精度提升明顯,且方位向穩定精度更高,保證天線指向穩定,滿足總體對穩定精度的指標要求,為后續衛星載荷上天可靠工作奠定了基礎。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
天天愛科學(2020年6期)2020-09-10 07:22:44
藝術啟蒙(2018年7期)2018-08-23 09:14:18
數學物理學報(2017年6期)2018-01-22 02:26:40
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16