基于非線性自抗擾控制器的PMSM直接轉(zhuǎn)矩控制
2021-07-16 08:02:24李少朋賀耀庭
計算機(jī)應(yīng)用與軟件 2021年7期
李少朋 謝 源 張 凱 賀耀庭
(上海電機(jī)學(xué)院電氣學(xué)院 上海 201306)
0 引 言
永磁同步電機(jī)擁有響應(yīng)速度快、輸出轉(zhuǎn)矩大及調(diào)速范圍廣的特點,在機(jī)器人、航空航天等領(lǐng)域受到廣泛應(yīng)用[1-2]。對于永磁同步電機(jī)的控制策略,目前較為常用的是矢量控制和直接轉(zhuǎn)矩控制(DTC)。矢量控制策略就是對變流器的電流和電壓進(jìn)行控制,獲得理想的電流和電壓,使得永磁同步電機(jī)按照需求得到控制。DTC策略是對轉(zhuǎn)矩和磁鏈進(jìn)行直接控制,控制結(jié)構(gòu)簡單。對比兩種控制策略,矢量控制計算較為復(fù)雜,不易控制;直接轉(zhuǎn)矩控制結(jié)構(gòu)簡單,動態(tài)響應(yīng)快,控制效果突出。但是直接轉(zhuǎn)矩控制存在轉(zhuǎn)矩及磁鏈脈動較大的問題,使得其應(yīng)用受到了一定的限制。
針對上述問題,需要對傳統(tǒng)的DTC控制做一些優(yōu)化以提高DTC的控制性能。文獻(xiàn)[3]提出一種基于模型預(yù)測控制的MPC的PMSM最優(yōu)滑模控制策略,設(shè)計出一種最優(yōu)滑模速度控制器,有效地抑制了超調(diào),提高了系統(tǒng)的啟動性能。文獻(xiàn)[4]提出了一種二階滑模控制器來取代傳統(tǒng)的PI控制,轉(zhuǎn)矩脈動相對傳統(tǒng)的直接轉(zhuǎn)矩控制有較明顯的降低,但是其轉(zhuǎn)速控制還是有一定的超調(diào)量,且抗擾動能力較弱。文獻(xiàn)[5-7]對PMSM外部干擾及不確定項設(shè)計了自抗擾控制器,進(jìn)行觀測并預(yù)測補(bǔ)償量,對于擾動量進(jìn)行估計補(bǔ)償,提高了系統(tǒng)的抗干擾能力,使得系統(tǒng)運(yùn)行更加的穩(wěn)定。文獻(xiàn)[8]將PMSM控制系統(tǒng)中的電流環(huán)控制器替換成了線性自抗擾控制器(LADRC),對轉(zhuǎn)速的變化有很強(qiáng)的抗干擾性,且大幅度提高了轉(zhuǎn)速響應(yīng)的能力,抑制了轉(zhuǎn)速的超調(diào)。文獻(xiàn)[9]采用一種指數(shù)趨近率滑模變結(jié)構(gòu),抑制了抖振并且收斂速度快,使得系統(tǒng)快速穩(wěn)定,有效地減小了轉(zhuǎn)矩脈動和磁鏈脈動,但是在負(fù)載轉(zhuǎn)矩變化時轉(zhuǎn)矩和轉(zhuǎn)速有一定的超調(diào)。文獻(xiàn)[10]從定子電阻補(bǔ)償?shù)慕嵌葋韺τ嬎氵^程中磁鏈進(jìn)行精確計算,通過將優(yōu)化后的定子電阻作為估算磁鏈的參考值,并且采用模糊控制和PI控制結(jié)合,來限制系統(tǒng)中定子電阻變化對控制的影響,降低了轉(zhuǎn)矩脈動,但其抗干擾性弱,并且轉(zhuǎn)速有較大的超調(diào),可能在負(fù)載轉(zhuǎn)矩變化較大的情況下產(chǎn)生失穩(wěn),并且其控制過程較為復(fù)雜。
自抗擾控制技術(shù)是韓京清[11]提出的一種新型的控制策略,其吸收了經(jīng)典控制技術(shù)的精華并作進(jìn)一步的發(fā)展。自抗擾控制技術(shù)不依賴被控對象的精確數(shù)學(xué)模型,可以通過對系統(tǒng)狀態(tài)的觀測,得到系統(tǒng)擾動并加以補(bǔ)償消除誤差,使得控制量得到精確的控制。本文對于傳統(tǒng)的直接轉(zhuǎn)矩控制(DTC)加以改進(jìn),控制策略基于傳統(tǒng)的最優(yōu)開關(guān)表控制。文獻(xiàn)[4]針對PI控制器在控制過程中不能滿足非線性系統(tǒng)控制要求等問題,將其替換成了滑模控制器;本文為增加抗干擾能力,減少超調(diào)量,設(shè)計了ADRC取代傳統(tǒng)PI轉(zhuǎn)速控制器,并搭建仿真模型對本文控制策略進(jìn)行驗證。
1 永磁同步電機(jī)的數(shù)學(xué)模型
以三相表貼式永磁同步電機(jī)(SurfacePermanent Magnet Synchronous Motor,SPMSM)為研究對象,采用文獻(xiàn)[8]中的永磁同步電機(jī)的d-q軸的數(shù)學(xué)模型,永磁同步電機(jī)的d-q軸數(shù)學(xué)模型如下。
定子電壓方程為:
(1)
定子磁鏈方程為:
(2)
式中:ud、uq為定子電壓在d-q軸上的分量;id、iq為定子電流在d-q軸的電流分量;ψd、ψq為定子磁鏈在d-q軸上磁鏈分量;ωe為電角度;R為定子電阻。永磁同步電機(jī)的數(shù)學(xué)模型中忽略了電動機(jī)的鐵芯飽和、磁滯和渦流損耗等影響因素[12]。
將式(2)代入式(1),可得定子電壓方程為:
(3)
電磁轉(zhuǎn)矩方程為:
(4)
運(yùn)動方程為:
(5)
式中:Ld、Lq為定子電感在d-q軸分量;ψf為轉(zhuǎn)子磁鏈;pn為極對數(shù);TL為負(fù)載轉(zhuǎn)矩;J為轉(zhuǎn)動慣量;ωr為轉(zhuǎn)速;B為摩擦常數(shù)。式(4)是針對三相內(nèi)置式永磁同步電機(jī)建立的數(shù)學(xué)模型,而對于三相表貼式的永磁同步電機(jī),定子電感滿足Ld=Lq=Ls的條件,其中Ls為等效同步電感,則此表貼式永磁同步電機(jī)模型的電磁轉(zhuǎn)矩方程為:
(6)
2 基于ADRC控制器設(shè)計
2.1 ADRC原理
ADRC由跟蹤-微分器(Tracking differentiator,TD)、擴(kuò)張狀態(tài)觀測器(Extended state observer,ESO)、非線性狀態(tài)誤差反饋控制率(Nonlinear state error feedback,NLSEF)三部分組成,其中ESO是ADRC的核心組成部分[13]。系統(tǒng)的控制效果取決于ESO總擾動的觀測和NLSEF的補(bǔ)償。對于一個n階的被控對象,ADRC原理圖如圖1所示。

圖1 自抗擾控制器原理圖
圖1中:v(t)為外部給定信號即參考信號,v(t)經(jīng)過TD過程得到v1,v1為v(t)的微分信號;vn為v(t)經(jīng)過TD得到的n-1階微分信號;y(t)為被控對象的輸出信號;z1,z2,…,zn分別為ESO實時估計的被控對象的狀態(tài)變量,而zn+1為ESO估計出的被控對象所受的擾動,并將其變成一個新的狀態(tài)即擴(kuò)張出來的擾動狀態(tài);e1,e2,…,en分別為經(jīng)過TD過程得到的微分信號與ESO狀態(tài)觀測出來的信號的誤差信號;u0(t)是經(jīng)過NLSEF得到的被控對象初始控制變量,u(t)是經(jīng)過估計補(bǔ)償后的最終控制量;b為補(bǔ)償因子,b值的精確性在很大程度上會影響估計精度。
對于一階系統(tǒng):

(7)
式中:w(t)為外擾作用;f(y,w(t),t)為綜合了外擾和內(nèi)擾的總擾動;u為控制量。令x=y,將式(7)轉(zhuǎn)換成狀態(tài)方程:

(8)
控制的目的是將式(7)變成形如y=u0的線性積分串聯(lián)標(biāo)準(zhǔn)型,使得控制更加簡單。式(8)狀態(tài)方程經(jīng)過TD過程,得到的數(shù)學(xué)模型為:
v1=fhan(v1-v(t),r0,h0)
(9)
式(9)中非線性函數(shù)fhan(x,r0,h0)定義如下:
(10)
式中:r0為TD中跟蹤速度因子,r0值越大跟蹤速度越快反之越慢,但是r0大小要根據(jù)過渡過程的快慢及系統(tǒng)的承受能力來決定;h0為系統(tǒng)的采樣周期。
式(8)中所示一階系統(tǒng)的ESO數(shù)學(xué)模型為:
(11)
式中:z1為系統(tǒng)輸出y的跟蹤信號;z2為ESO對系統(tǒng)擾動的估計值,其中包括系統(tǒng)的外擾動和內(nèi)擾動,判斷ESO是否可以正常地工作需要檢測信號z1是否可以準(zhǔn)確地觀測到系統(tǒng)的輸出信號;α1、α2為非線性因子,其值的調(diào)整規(guī)則為0<α2<α1<1,如果α2=α1=1,則函數(shù)就變?yōu)榫€性函數(shù);δ為濾波因子,δ>0;β01、β02為可調(diào)參數(shù);e為TD跟蹤信號與z1觀測信號誤差值;fal(e,α,δ)為非線性函數(shù)。函數(shù)fal(e,α,δ)表達(dá)式如下:
(12)
式(8)所示的一階系統(tǒng)的NLSEF的數(shù)學(xué)模型如下:
(13)
式中:α3為非線性因子;δ1為濾波因子。式(13)中對于最終控制輸出的量u給出了兩種控制結(jié)構(gòu),對于控制結(jié)構(gòu)的選取工程實踐中的試驗值進(jìn)行選取。其中:b=1時的控制結(jié)構(gòu),可以針對歸一化后的對象,即串聯(lián)積分器的形式,增益為1;b≠1時的控制結(jié)構(gòu),為對于當(dāng)前的增益有相對精確的判斷,并且其增益不是1。對于控制量輸出結(jié)構(gòu)的劃分,目的是為了在調(diào)節(jié)參數(shù)的過程中減少調(diào)節(jié)次數(shù),降低控制工程中的復(fù)雜程度。
2.2 ADRC控制器設(shè)計
由永磁同步電機(jī)的運(yùn)動方程可得:
(14)
由式(14)可以得出對系統(tǒng)外部干擾的影響量為TL,TL的變動為系統(tǒng)的外擾;B、J為系統(tǒng)建模過程中的不確定項,即為內(nèi)擾。這些擾動會對系統(tǒng)的控制精度,系統(tǒng)的響應(yīng)速度產(chǎn)生影響。基于ADRC原理,將系統(tǒng)受到的擾動和記為w(t):
(15)
式中:w(t)即總擾動。基于電機(jī)的運(yùn)動方程,轉(zhuǎn)速環(huán)控制輸出的信號為電磁轉(zhuǎn)矩的給定信號,得出速度控制環(huán)的控制律為:
(16)

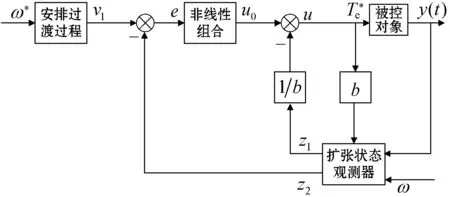
圖2 ADRC速度控制器結(jié)構(gòu)圖
3 仿真及結(jié)果分析
為驗證上述方法的可行性和穩(wěn)定性,基于MATLAB/Simulink搭建傳統(tǒng)的DTC和改進(jìn)后的DTC進(jìn)行仿真比較研究。改進(jìn)后的控制框圖如圖3所示。
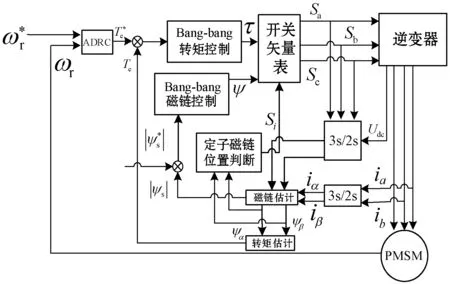
圖3 ADRC-PMSM控制框圖
仿真過程中的永磁同步電機(jī)參數(shù)如下:極對數(shù)Pn=4,定子電感Ld=Lq=8.5 mH,定子電阻R=12.9 Ω,永磁磁鏈ψf=0.175 Wb,轉(zhuǎn)動慣量J=0.000 8 kg·m2,粘滯摩擦系數(shù)B=0.001 N·m·s,額定轉(zhuǎn)速為1 200 rad/min,額定轉(zhuǎn)矩TN=2 N·m,額定功率PN=600 W,額定電壓UN=311 V。
為了對上述理論的驗證,本文將傳統(tǒng)的PI-DTC控制與基于ADRC改進(jìn)后的ADRC-DTC控制分別進(jìn)行仿真實驗并進(jìn)行對比分析。本文做了如下對比實驗:設(shè)置轉(zhuǎn)速n=600 rad/min,電機(jī)在初始負(fù)載轉(zhuǎn)矩為0 N·m,0.2 s后負(fù)載轉(zhuǎn)矩為1.5 N·m,滯環(huán)控制器的切換范圍分別設(shè)置如下:轉(zhuǎn)矩控制器為[-0.1,0.1],磁鏈控制器為[-0.002,0.002]。
圖4所示為ADRC與PI控制的轉(zhuǎn)速仿真結(jié)果波形。ADRC系統(tǒng)啟動過程快并且沒有超調(diào),可以看出系統(tǒng)達(dá)到給定轉(zhuǎn)速時間大概0.04 s,動態(tài)性能好,轉(zhuǎn)速響應(yīng)快。突加負(fù)載時即在0.2 s的時刻,轉(zhuǎn)速有較小波動,轉(zhuǎn)速在0.200 5 s時刻達(dá)到穩(wěn)定。
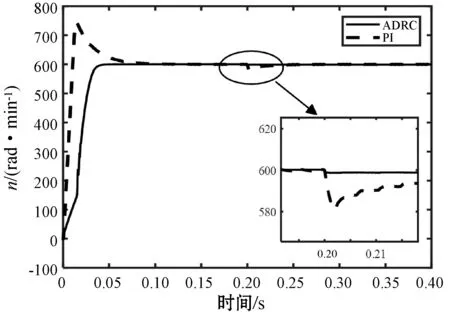
圖4 ADRC-DTC轉(zhuǎn)速與PI-DTC轉(zhuǎn)速響應(yīng)波形
相比而言,圖4中的傳統(tǒng)PI-DTC控制啟動過程有極大的超調(diào)并且系統(tǒng)到達(dá)給定轉(zhuǎn)速的時間為0.1 s左右,達(dá)到穩(wěn)定運(yùn)行狀態(tài)所需時間長,其跟隨系統(tǒng)的動態(tài)性能遠(yuǎn)低于ADRC-DTC。在0.2 s時,突加負(fù)載,轉(zhuǎn)速有小幅度波動,并且達(dá)到穩(wěn)定時刻在0.25 s左右,大于ADRC-DTC系統(tǒng)的恢復(fù)時間。由此也說明了ADRC策略的動態(tài)性能好,提高了系統(tǒng)的動態(tài)性能和抗干擾性并且極大地抑制了轉(zhuǎn)速的超調(diào)。
圖5為ADRC-DTC控制轉(zhuǎn)矩仿真圖。可以看出,在0.2 s時刻加入負(fù)載轉(zhuǎn)矩擾動,轉(zhuǎn)矩波動小并且迅速穩(wěn)定達(dá)到所給定的轉(zhuǎn)距值。突加轉(zhuǎn)矩時,轉(zhuǎn)矩波動值最大達(dá)到2.1 N·m,波動范圍為1.25~1.7 N·m,從波動到穩(wěn)定的時間為0.201 s。

圖5 ADRC-DTC轉(zhuǎn)矩波形
圖6為傳統(tǒng)PI-DTC控制轉(zhuǎn)矩仿真圖,在0.2 s時加負(fù)載轉(zhuǎn)矩擾動,轉(zhuǎn)矩波動較大最大值達(dá)到2.5 N·m,并且達(dá)到穩(wěn)定的時間較長。轉(zhuǎn)矩的波動范圍為0.51~2.25 N·m,波動幅度較大。從系統(tǒng)穩(wěn)定的時間上看,圖6的響應(yīng)速度遠(yuǎn)不如圖5的轉(zhuǎn)矩響應(yīng)速度。由此可以看出本文控制方式可以有效降低轉(zhuǎn)矩脈動,并且可以迅速達(dá)到穩(wěn)定,提高了系統(tǒng)的控制精度和系統(tǒng)的穩(wěn)定性。

圖6 PI-DTC轉(zhuǎn)矩波形
圖7為電磁轉(zhuǎn)矩的對比圖。可以看出,本文提出的控制策略對轉(zhuǎn)矩脈動的抑制效果十分有效,證明了本文策略的優(yōu)越性。圖8所示為ADRC與PI控制輸出的參考轉(zhuǎn)矩對比圖。可以看出經(jīng)ADRC輸出的轉(zhuǎn)矩參考值更加平穩(wěn),并且輸出的參考轉(zhuǎn)矩值更加精確。

圖7 電磁轉(zhuǎn)矩對比圖
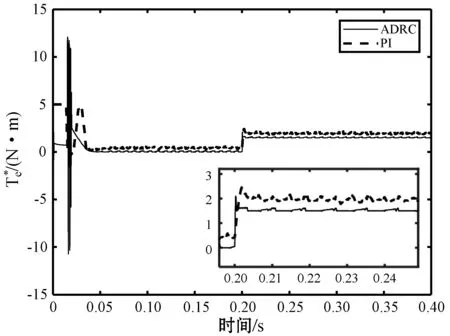
圖8 參考轉(zhuǎn)矩對比圖
圖9為ADRC-DTC與PI-DTC的磁鏈脈動對比曲線。可以看出ADRC-DTC磁鏈的波動范圍值為0.004 Wb。PI-DTC控制的磁鏈曲線的波動范圍為0.01 Wb。對比兩種方法的控制效果,可以看出ADRC-DTC有效地降低了磁鏈的波動幅度,抑制了磁鏈的大幅脈動。

圖9 ADRC-DTC磁鏈與PI-DTC磁鏈對比波形
4 結(jié) 語
為了解決傳統(tǒng)PI-DTC控制中的超調(diào)頻繁、超調(diào)量大以及動態(tài)響應(yīng)速度慢等問題,本文將自抗擾控制理論引入轉(zhuǎn)速環(huán),取代傳統(tǒng)DTC控制的中的PI控制器,與傳統(tǒng)的PI-DTC控制進(jìn)行比較,并且使用MATLAB/Simulink進(jìn)行仿真實驗,結(jié)論如下:
(1) 轉(zhuǎn)速環(huán)采用自抗擾控制器的PMSM-DTC系統(tǒng)比轉(zhuǎn)速環(huán)采用PI控制器的PMSM-DTC系統(tǒng)的動態(tài)響應(yīng)速度提高了0.06 s,并且能夠極大地抑制轉(zhuǎn)速的超調(diào)。
(2) 轉(zhuǎn)速環(huán)采用自抗擾控制器,PMSM-DTC系統(tǒng)有快速的轉(zhuǎn)矩響應(yīng)速度。在突加負(fù)載轉(zhuǎn)矩后的0.01 s內(nèi),轉(zhuǎn)矩就達(dá)到了穩(wěn)定。并且該系統(tǒng)對轉(zhuǎn)矩脈動有一定的抑制,相比于傳統(tǒng)的PI-DTC控制轉(zhuǎn)矩脈動降低了74.13%。
(3) 轉(zhuǎn)速環(huán)采用自抗擾控制器,PMSM-DTC系統(tǒng)的磁鏈脈動有了一定的降低,相比于傳統(tǒng)的PI-DTC控制,磁鏈脈動降低了66.66%。
(4) 轉(zhuǎn)速環(huán)采用了自抗擾控制器,取代PI控制器,提高了系統(tǒng)的抗干擾性和魯棒性。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
鑿巖機(jī)械氣動工具(2016年3期)2016-03-01 04:00:25
