永磁電機齒槽轉矩分析研究
2021-07-19 10:02:42任麗君吳文賢
日用電器 2021年6期
李 寧 任麗君 吳文賢
(1.珠海格力電器股份有限公司 珠海 519070;2.廣東省制冷設備節能環保技術企業重點實驗室 珠海 519070)
引言
永磁電動機是有別于傳統電勵磁電動機的新型電動機。目前,永磁電動機發展很快,它具有功能密度高、效率高、轉矩大,并且功率因數也較高[1]。齒槽轉矩是定子鐵芯的齒槽與轉子永磁體相互作用而產生的磁阻轉矩。齒槽轉矩是電機本身的輸出性能穩定性的一項重要參數。
齒槽轉矩是引起永磁電機振動和噪聲的原因之一,影響永磁電機的高效運行,電機優化設計的一個主要目標就是有效削弱齒槽轉矩幅值,提高電機性能[2]。因此關于齒槽轉矩的產生機理、計算方法及削弱措施一直是研究熱點。
目前一般談及齒槽轉矩均設定為等電樞(定轉子等高)模型探討,而實際電機產品中,為了獲得更高的性能,電樞往往是不等高的,本文主要探究不等高電樞下齒槽轉矩隨不等高程度的變化情況,為今后永磁電機電樞更合理設計提供一定參考。
1 原理與方法
1.1 原理
永磁電動機的齒槽轉矩定義為電機不通電時的磁場能量W相對于位置角α的負導數[3],即:

式中:
Tc—電機的齒槽轉矩;
W—電機的磁共能;
α—永磁體轉子位置角。
齒槽轉矩其本質為磁阻變化產生的轉矩。結合實際永磁電動機方案,設計制定了不同程度的不等電樞結構方案,通過不等高比值K(轉子高/定子高)由低到高的變化,使用仿真與實測兩種方式來觀察齒槽轉矩的變化情況。
1.2 方法
使用Ansoft軟件的Maxwell模塊進行齒槽轉矩三維仿真。電機電樞為不等高結構,二維仿真僅能適用等電樞結構,因此使用三維來仿真電機實際不等電樞的理論齒槽轉矩從原理上來說應與實際更為接近。
2 仿真與實驗
2.1 仿真
以現有12S8P永磁電動機為原型,設計不同定轉子高度差的方案,根據以下不同K值來進行仿真掃描。如表1數據。
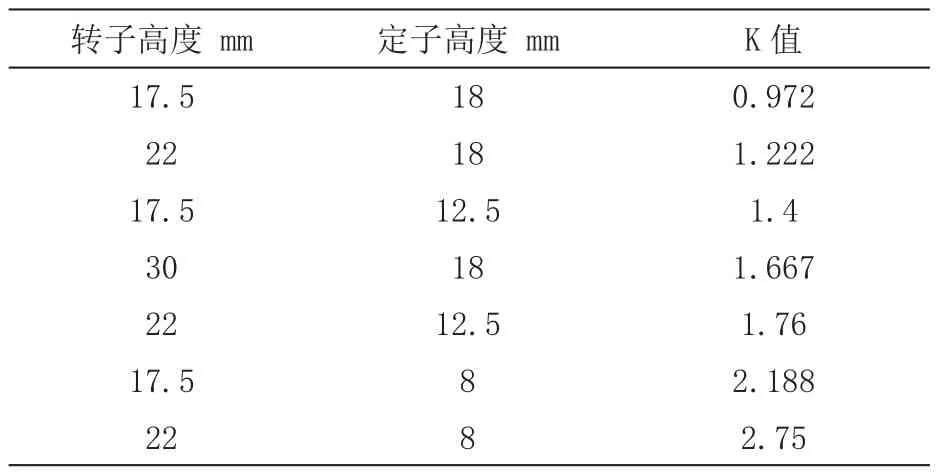
表1 K值設計表
使用三維制圖軟件構建對應的結構模型,之后將模型導入有限元Ansoft分析軟件的Maxwell模塊進行齒槽轉矩三維仿真。
根據12S8P電機齒槽轉矩產生機理,其每機械周期內將產生槽數和極數的最小公倍數個齒槽周期數。根據不同方案建立的模型仿真結果匯總如表2。
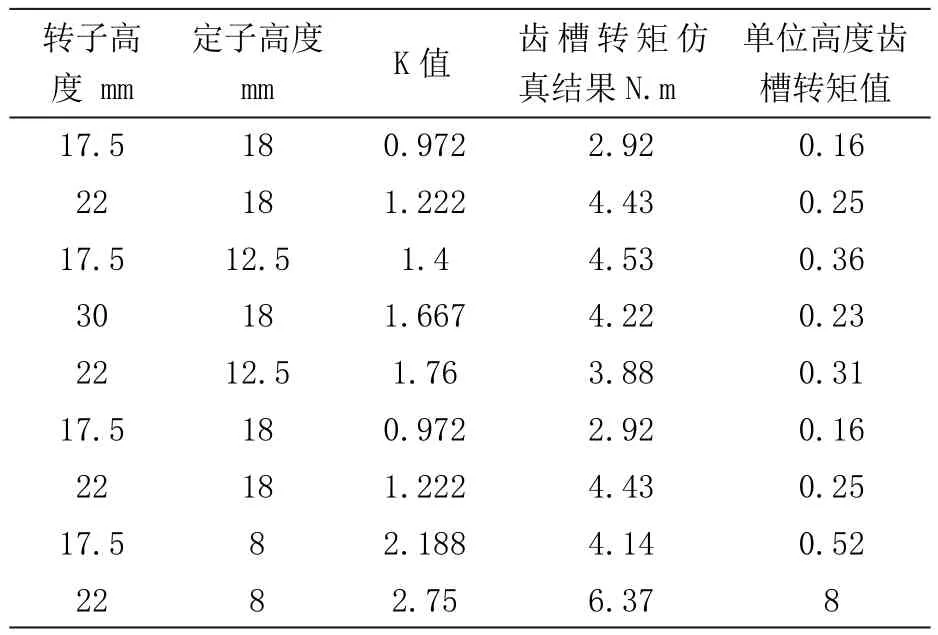
表2 仿真結果匯總表
表2可看出,在轉子/定子比值K (等電樞)趨近1時,其齒槽轉矩及單位高度齒槽轉矩均相對較小,在比值K超過1后,齒槽轉矩均不同程度的變大。尤其是當K值達到2.75時,齒槽轉矩明顯上升,說明不等電樞情況下齒槽轉矩由磁密引起的變化要大于由電樞長度所引起的變化。
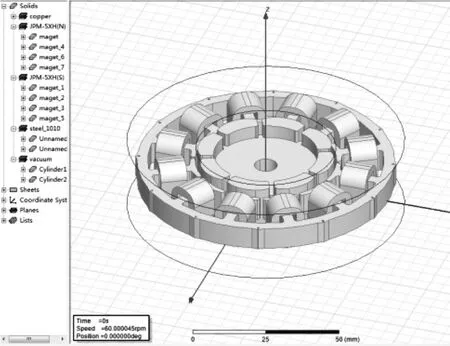
圖1 仿真模型圖
仿真K值波形如圖2~8。
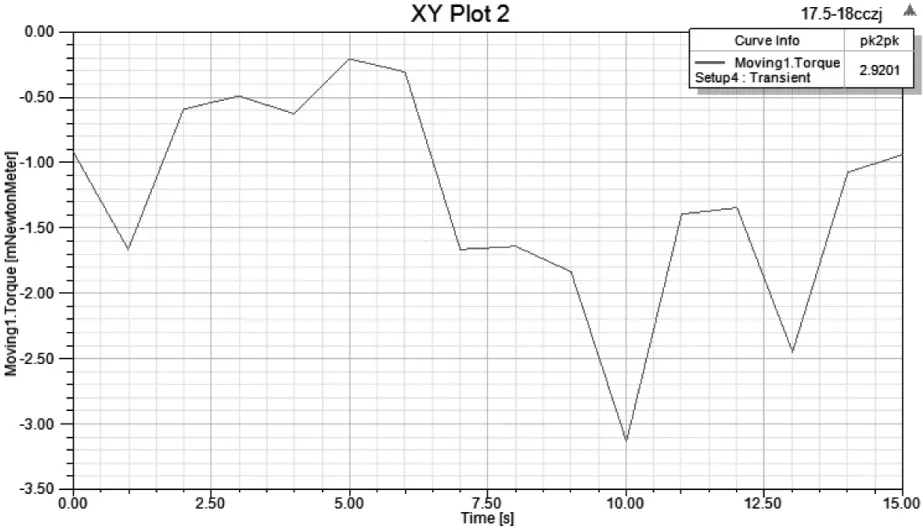
圖2 K=0.972仿真結果
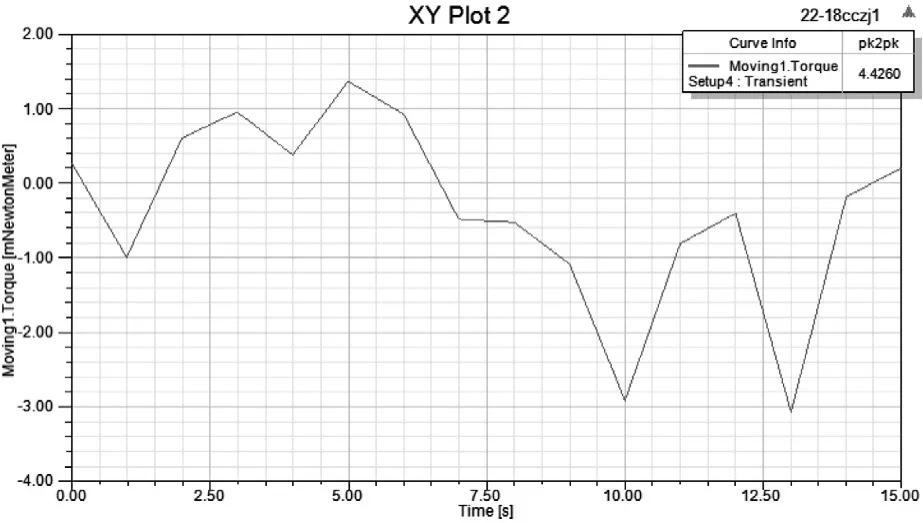
圖3 K=1.222仿真結果
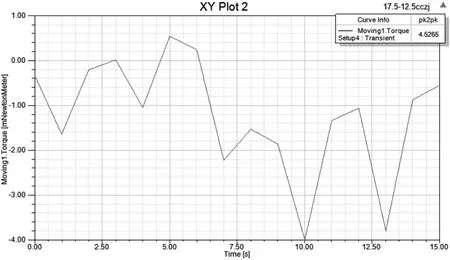
圖4 K=1.4仿真結果
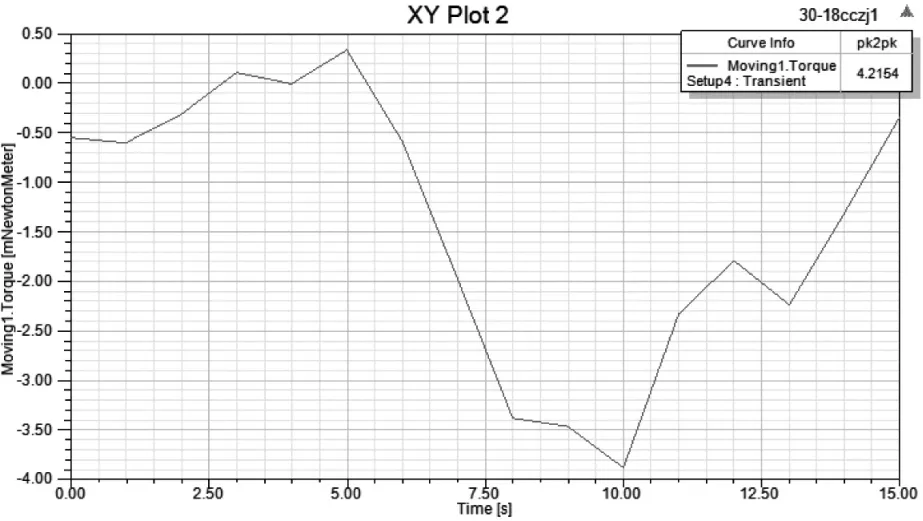
圖5 K=1.667仿真結果
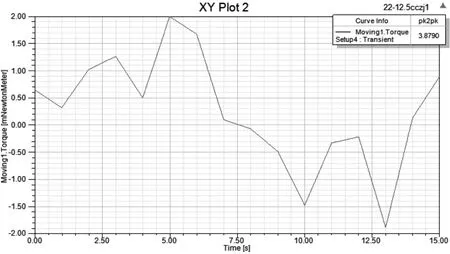
圖6 K=1.76仿真結果
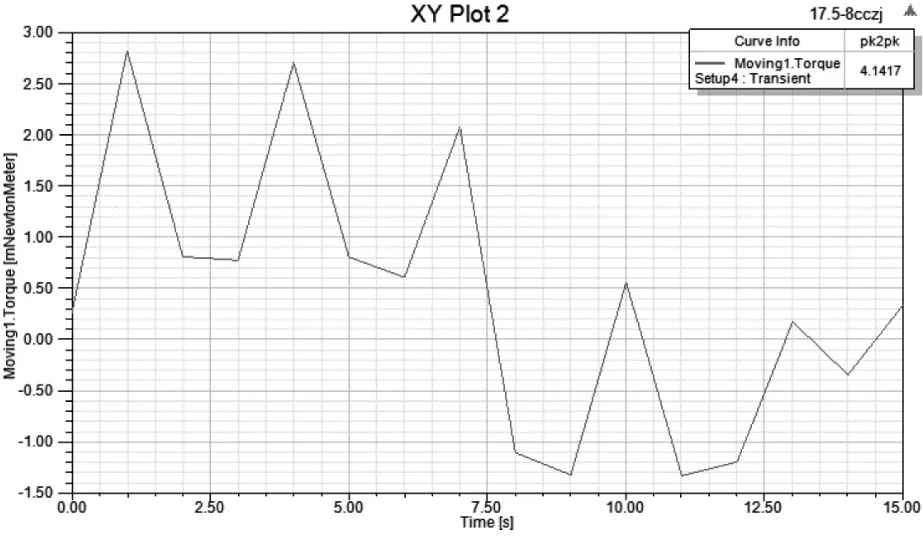
圖7 K=2.188仿真結果
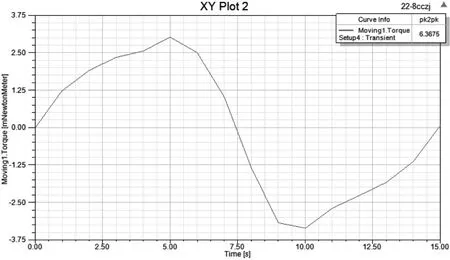
圖8 K=2.75仿真結果
觀察單位高度的齒槽轉矩值,可看出定子高度在下降后,單位高度齒槽轉矩值反而在上升,因此猜測及上升原因可能與定子鐵芯的磁飽和程度相關,說明在永磁磁通近似時,由于氣隙磁阻的差異較大,從而導致齒槽轉矩變化同樣明顯,在不等電樞情況下齒槽轉矩大小與磁密(氣隙磁阻)關系密切。
齒槽轉矩隨轉子/定子比值K的變化線見圖9。

圖9 仿真曲線變化圖
2.2 實驗
根據不同K值的定轉子方案進行樣機準備,并進行齒槽轉矩的測試見圖10。

圖10 樣機圖片
不同方案測試結果匯總如表3。

表3 實測結果匯總表
觀察實測數據,與仿真數據類似的是,在磁瓦/鐵芯比值K(等電樞)趨近1時,其齒槽轉矩及單位高度齒槽轉矩均相對較小,在比值K超過1后,齒槽轉矩同樣不同程度的變大。當K值達到2.75時,齒槽轉矩同樣明顯上升。
齒槽轉矩隨磁瓦/鐵芯比值K的變化線見圖11。
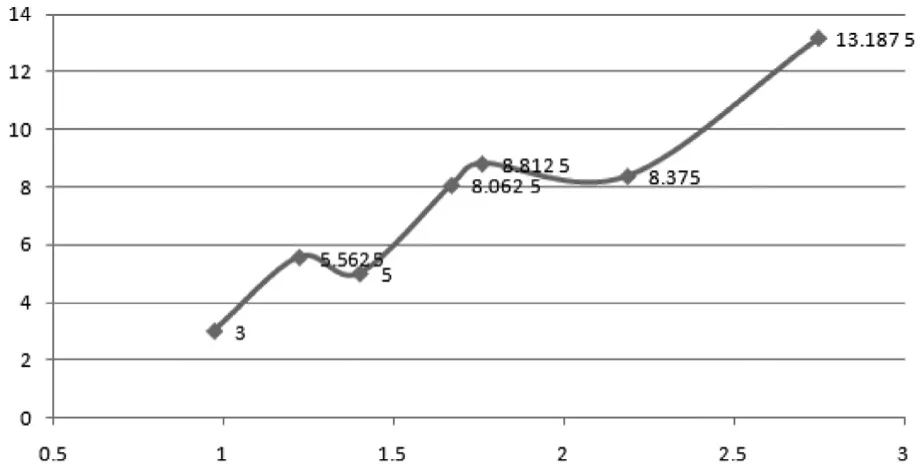
圖11 實測曲線變化圖
對比實測與仿真的趨勢變化曲線,兩者大體趨勢相同,說明隨K值增大,齒槽轉矩總體是增大的。
3 結論
本文將三維有限元分析與實驗研究相結合,研究了定轉子高度差比值K對齒槽轉矩的影響特性。通過本文仿真分析及實驗驗證,隨著K值增大,齒槽轉矩總體是增大的。而在比值K趨近1時,其齒槽轉矩及單位高度齒槽轉矩均相對較小。在不等電樞情況下,齒槽轉矩由鐵芯磁密飽和程度引起的變化要大于由電樞長度所引起的變化。
