基于ARM11的農機車載狀態監測系統的設計
2021-07-20 07:58:48郝立元
電子制作 2021年13期
郝立元
(蘭州文理學院傳媒工程學院,甘肅蘭州,730000)
0 引言
隨著我國土地三權分離政策的實施[1],傳統的農業向著規模化集約化的方向發展,隨之而來的是不斷增強的農機租賃業務需求。對于農機租賃商來說,為了維護其利益,希望可以通過一種有效的車載狀態監測系統監控車輛的使用狀況,避免租戶因不正常操作或異常行為導致車輛損壞。通過車載狀態監測系統獲取車輛的位置信息,車輛運行狀態信息,車輛異常檢測,車輛是否處于違規狀態,遠程車輛操作,如遠程鎖車,遠程限速等,以保證供應商的權益。同時由于農機工作環境較為惡劣,工作強度大,農機出現故障的頻率大大增加,通過車載狀態監測系統獲取車輛的使用信息診斷車輛可能出現的問題,一方面可以預防性維護,另一方面也可以快遞診斷故障原因,降低農機維修的時間成本。
農機信息化智能化是我國農業現代化的必經之路[2],為了應對農信信息化智能化的需求,提出了以ARM11體系結構的S3C6410處理器為核心,利用北斗定位技術和5G通信技術設計了遠程農機車載狀態監測系統,詳細闡述了車載終端的部分軟硬件設計,包括系統部分電路的詳細設計,以及軟件整體架構的設計和各功能模塊的具體實現,包括車輛定位,異常檢測,故障報警,以及遠程無線升級等功能,模擬實驗結果表明,該系統運行狀態穩定,可以較好的滿足農機的狀態監控。
1 農機車載終端硬件設計
■1.1 整體設計
針對農機設備的工作環境,車載終端監控設備在硬件設計上必須具有高可靠性和可維護性,因此終端硬件采用模塊化設計,系統的硬件包括供電電路,數據采集,5G無線通信電路,數據存儲以及硬件看門狗等,終端的硬件結構如圖1所示。
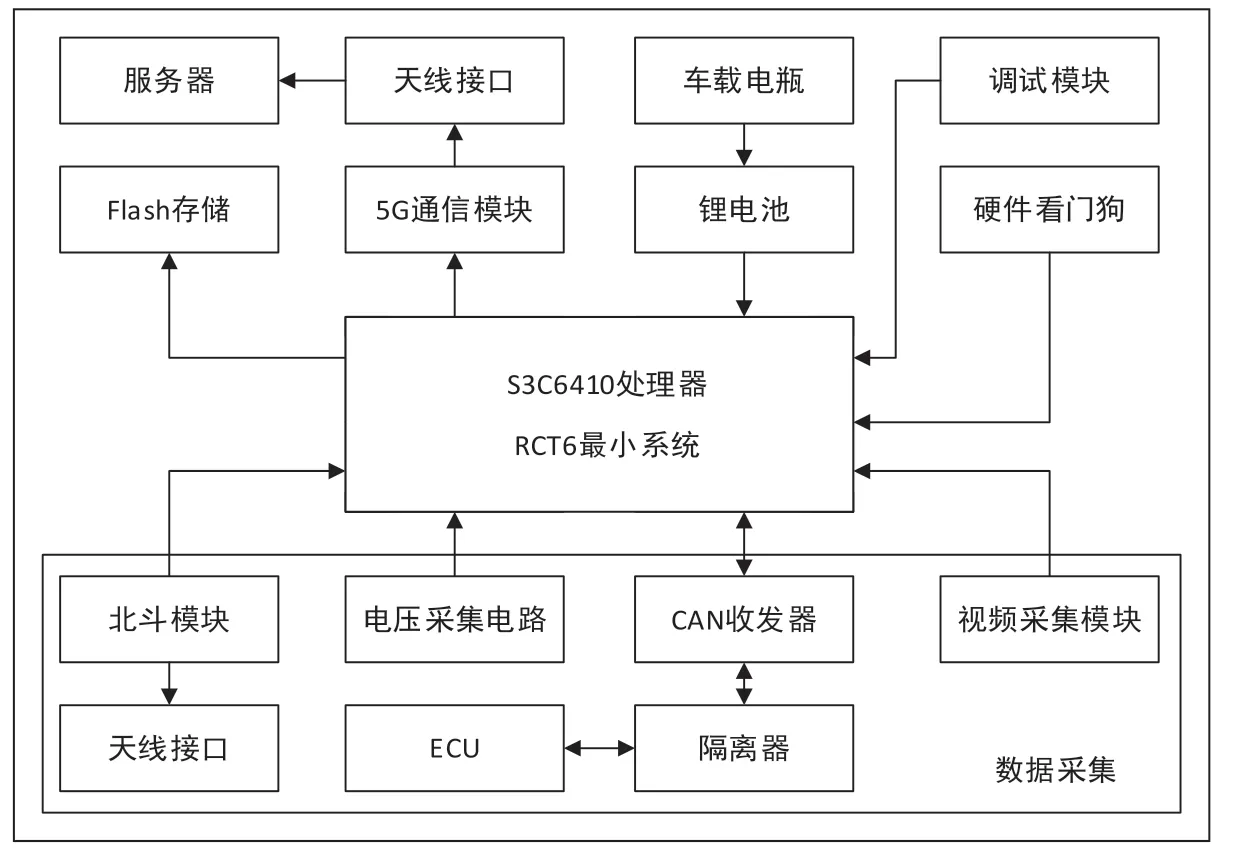
圖1 硬件總體設計
電源管理模塊中,車載終端監控設備使用鋰電池和車載電瓶聯合供電,當車載電瓶有電時,硬件設備使用電瓶供電,電瓶處于虧電狀態時切換到備用鋰電池供電,同時向控制中心發送報警信息,從而保證整個供電系統不會終止供電。數據采集模塊中,數據采集電路可以分為位置信息采集電路,農機運行狀態參數采集,故障碼采集,電壓數據采集等。數據采集模塊中的各個組件通過相應的接口與主控機連接,如通過USART2接口與北斗導航模塊連接,MCU采集農機內部數據后通過CAN接口發送給處理器。以ARM11為架構的S3C6410支持Normal,Idle,Stop和Sleep模式,在農機工作狀態時,主控芯片可以處于Normal狀態,其他時間處于Sleep模式,從而降低系統的功耗,在最大程度上保證系統的續航時間。
■1.2 CAN總線數據采集電路
CAN通信模塊由CAN控制器和收發器組成,負責CAN總線物理層與數據鏈路層的封裝任務,為了簡化電路設計,本文采用了集成CAN控制器的S3C6410處理器。為了降低硬件成本和尺寸,在CAN收發器上采用3.3V電壓,CAN通信模塊電路如圖2所示。
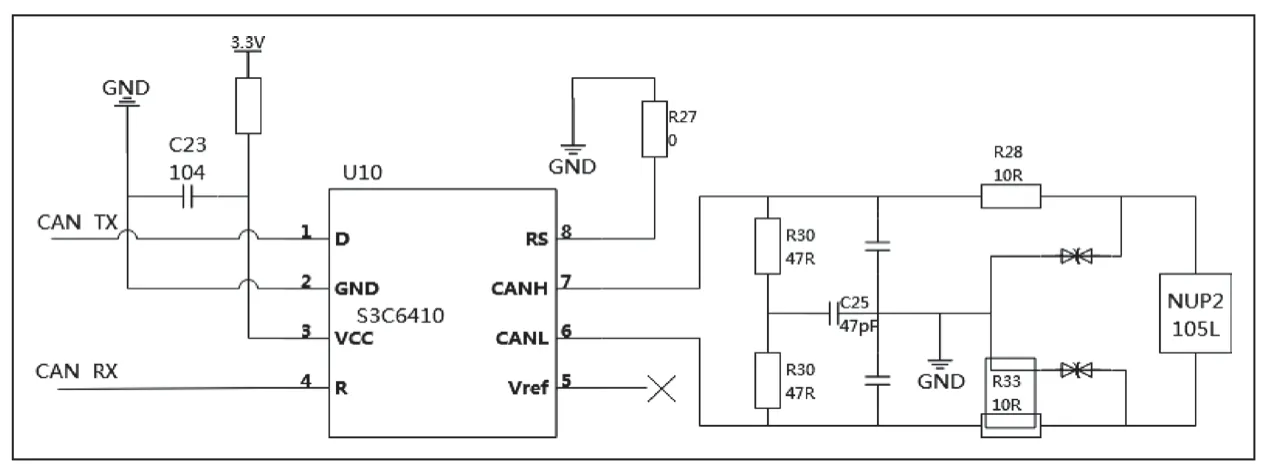
圖2 CAN通信模塊電路圖
為了提高CAN通信的穩定性,需要在通信模塊中添加CAN總線保護器NUP2015L,可以優化PN結的有源區域,從而防止EMI浪涌電壓和ESB保護,同時需要在CAN總線收發端兩端CAN_H和CAN_L之間匹配100Ω的電阻防止信號反射,保證數據傳輸的穩定性。
■1.3 北斗數據采集電路
為了提高系統的穩定性和可用性,系統采用端聯信息技術有限公司的北斗/GSP雙模定位模塊DL-WH6558,該模組采用低功耗芯片AT6558,具有超高的靈敏度,模塊定位精度高,同時內建LNA信號放大器,輸出信號更強,具有多種輸出速率可選,數據輸出遵循NMEA0183協議。北斗模塊電路如圖3所示。
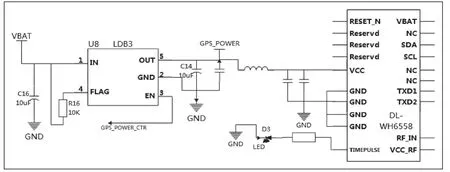
圖3 北斗模塊電路圖
為了降低農機車載終端設備的功耗,利用LD33芯片對北斗定位模塊進行功耗控制,通過控制GPS_POWER_CTR管腳的電壓使能功能,間歇性供電有效提高定位芯片的功耗和穩定性。
2 農機車載終端軟件設計
■2.1 總體設計
農機車載終端的軟件主要負責實現農機各項數據的采集,并將數據通過5G數據鏈路發送到遠程服務器,同時還需要通過5G通信鏈路監聽并響應遠程服務器下發的車輛控制命令。為了實現上述功能,車載終端需要具備一定的實時性和并行處理能力,在軟件系統上需要采用中斷并發[3]和狀態機控制[4]相結合的架構,針對不同的任務采用不同的控制邏輯。中斷并發機制在主程序中處理各任務之間的邏輯關系,在各任務中配置中斷信息,并將具體的任務處理放在相應的中斷處理函數中。5G通信模塊在軟件系統中處于核心地位,負責數據的發送和接收,同時負責任務狀態機狀態的轉換,從而實現主控程序對任務的調度。車載終端的軟件流程如圖4所示。
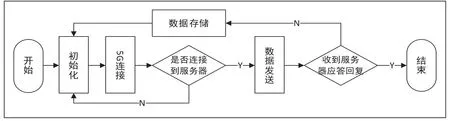
圖4 車載終端軟件總體流程圖
終端上電之后,系統首先進行硬件和軟件的初始化工作,硬件初始化結束后,系統首先通過5G鏈路進行終端的注冊和服務器的連接,接連成功之后持續保持心跳信息,上傳農機的狀態信息,同時接收服務端發送過來的命令,根據命令類型執行并回復執行結果。
■2.2 數據傳輸
數據傳輸的可靠性實時性和降低傳輸數據的費用是車載終端必須考慮的問題。對于前者,通過采用閉環形式的雙向數據傳輸方式,同時在接受數據時采用CRC校驗[5]。對于后者,在終端上傳數據前,需要對數據進行無損壓縮,降低數據傳輸量,從而提高系統響應的實時性和通信效率。
終端向遠程服務器傳輸數據都需要使用5G流量,為了降低流量費用,降低數據傳輸中可能出現的問題,需要對傳輸的數據進行壓縮。由于終端采集的數據大多是固定參數,對于固定參數的固定格式,采用BCD碼[6]進行壓縮,由于農機的工作環境非常惡劣,因此車載終端作業收到的干擾也多于常規車輛。為了保證車載終端能夠良好的運行,終端本身必須具備一定的自診斷和自恢復能力。終端自診斷管理模塊需要根據硬件故障出現的不同的癥狀采用不同的處理方式,如當5G網絡連接失敗次數超過預設的數值后,會產生復位操作,通過主控CPU的MODE_PWR引腳輸出高電平關閉電源,然后恢復供電,硬件重啟5G通信模塊。
3 系統測試驗證
■3.1 實驗環境搭建
在本實驗中,采用模擬和實際機器相結合的方式進行測試,其中終端基于飛凌S3C6410開發板開發,通過外接5G模塊嵌入式工業通訊模組,實現5G通信,如圖5所示。同時使用USB-CAN設備[7]模擬實現農機車載終端S3C6410開發板的ECU接口,同時通過CANtest軟件[8]發送ECU數據,測試CAN數據的發送和接收任務。

圖5 飛凌S3C6410開發板
■3.2 功能測試
功能測試是在仿真環境下完成的,測試過程:(1)將終端設備與USB-CAN設備相連,然后給終端設備上電,測試終端設備的初始化過程;(2)5G功能模塊連接成功,然后CANtest軟件發送數據,模擬終端采集的農機狀態數據,然后通過5G功能模塊向服務器發送數據;(3)觀察客戶端接收數據,然后與CANtest軟件發送的數據對比,測試1000次,測試兩數據之間的區別,測試數據傳輸的可靠性。測試結果如下,遠程服務端接收的數據與CANtest軟件發送的數據相同的概率為99.8%,且位置數據采集的結果與實際結果基本相同。
在車輛模擬測試過程中,使用一臺電腦作為服務器運行遠程服務端,同時使用計算機向終端模擬發送模擬數據,然后觀察終端及軟件的運行狀態,測試結果表明,在服務端和客戶端軟件3×24小時的測試過程中,均能夠正常穩定的運行,但隨著模擬數據量的增加,網絡出現一定程度的擁堵。
4 結束語
為了滿足自動大型農機設備自動化和智能化的需求,提出了以ARM11體系結構的S3C6410處理器為核心,利用北斗定位技術和5G通信技術設計了遠程農機車載狀態監測系統,實現了一套成本低,功耗低,穩定性高同時具備較高集成度的車載監控終端。實驗結果表明,本設計可以有效滿足農機車載終端的日程工作。
