基于粒子群遺傳算法的三軸磁通門誤差校正
2021-07-20 08:57:16呂俊偉陶榮華
探測與控制學(xué)報 2021年3期
遲 鋮,王 丹,呂俊偉,陶榮華
(1.海軍潛艇學(xué)院遙感所,山東 青島 266001;2.山東華宇工學(xué)院,山東 德州 253000)
0 引言
磁通門磁力儀作為一種磁場三分量測量儀器,具有靈敏度高、體積小、價格相對較低的優(yōu)點,在地磁導(dǎo)航、鐵磁性目標(biāo)探測[1-3]等領(lǐng)域得到了廣泛的應(yīng)用。然而在磁通門磁力儀實際的制造過程中,受加工技術(shù)工藝的限制,磁通門磁力儀的三個測量軸存在三軸非正交、靈敏度不一致、零點偏置等誤差,使得磁場的測量值與實際值之間存在著較大的誤差,嚴重影響磁通門磁力儀的測量精度,因此磁通門磁力儀在使用前首先需要對其進行誤差校正。
目前國內(nèi)外的學(xué)者在磁通門磁力儀的誤差校正方面開展了大量的研究,常見的方法主要分為矢量校正和標(biāo)量校正兩大類。矢量校正[4-5]需要利用高精度的三軸無磁轉(zhuǎn)臺提供磁通門磁力儀實時的姿態(tài),該方法實現(xiàn)過程較為復(fù)雜,因此僅適用實驗室條件下對磁通門磁力儀進行校正;標(biāo)量校正[6-11]通過將磁通門磁力儀放置于勻強磁場中,通過測量不同姿態(tài)下的數(shù)據(jù)后進行擬合得到校正參數(shù),該方法不需要高精度的輔助測量儀器,且操作簡單,因此是目前較為常用的校正方法。文獻[8]提出了一種利用簡化模型對誤差進行校正的方法,但是該方法的校正精度不高;文獻[9]通過對校正參數(shù)進行兩次非線性轉(zhuǎn)換,然后利用線性最小二乘法實現(xiàn)對校正參數(shù)的估計,但是該方法的轉(zhuǎn)換過程復(fù)雜;文獻[10]提出了一種基于蟻群算法的三軸非正交誤差校正方法,但未考慮三軸靈敏度不一致和零點漂移等誤差;文獻[11]提出了一種利用遺傳算法來求解校正參數(shù)的誤差校正方法,但是該方法受初始參數(shù)的影響較大。本文針對目前磁通門磁力儀誤差校正方法中存在的校正精度不高和受初始參數(shù)影響較大的問題,提出了基于粒子群遺傳算法的三軸磁通門誤差校正方法。
1 磁通門磁力儀的誤差模型
磁通門磁力儀的誤差主要包括三軸非正交誤差、靈敏度誤差和偏置誤差。三軸非正交誤差指的是實際磁通門磁力儀的各個測量軸之間不是完全正交的,建立如圖1所示的坐標(biāo)系。
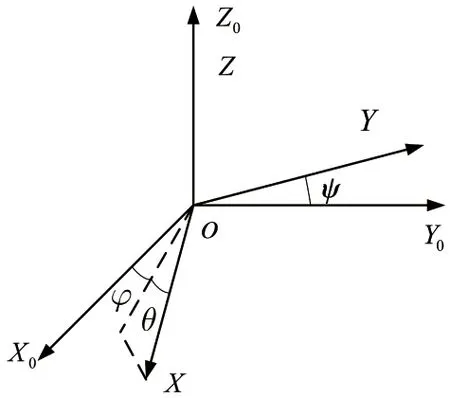
圖1 三軸非正交誤差示意圖Fig.1 Schematic diagram of the model of three axial non-orthogonal error
O-X0Y0Z0為理想的三軸正交坐標(biāo)系,O-XYZ為磁通門磁力儀實際的測量坐標(biāo)系。假設(shè)測量軸OZ與坐標(biāo)軸OZ0重合,且指向一致,將坐標(biāo)系O-XYZ沿著OZ軸旋轉(zhuǎn),使得測量軸OY與Y0OZ0在同一個平面上,測量軸OY與坐標(biāo)軸OY0之間的夾角為ψ,測量軸OX與X0OY0平面之間的夾角為θ,測量軸OX在X0OY0平面的投影與坐標(biāo)軸OX0之間的夾角為φ。靈敏度誤差指的是磁通門磁力儀的三個測量軸的靈敏度不一致導(dǎo)致的誤差,假設(shè)三個測量軸OX、OY、OZ的靈敏度分別為kx、ky、kz。偏置誤差指的是當(dāng)磁通門磁力儀放置于磁場強度為0 nT的環(huán)境中時,三個測量軸仍會輸出小的偏移量,假設(shè)三個測量軸的偏置為b=[bx,by,bz]T。
綜合考慮磁通門磁力儀的三軸非正交誤差、靈敏度誤差和偏置誤差,得到磁力儀的測量值與實際值之間滿足的關(guān)系如下:
Bm=SCNOB+b+ε
(1)
2 基于粒子群遺傳算法的磁通門誤差校正
2.1 磁通門磁力儀誤差校正模型
根據(jù)式(1),磁通門磁力儀的誤差模型可以簡化為如下形式:
Bm=CB+b+ε
(2)
式(2)中,C=SCNO為綜合誤差矩陣,相對于磁力儀的誤差而言,磁力儀的測量噪聲可近似忽略不計,因此誤差模型可以簡化成如下形式:
B=C-1(Bm-b)
(3)
式(3)即為磁通門磁力儀的誤差校正模型,由式(3)可得,只要求得C-1與b便可以實現(xiàn)將磁通門磁力儀的測量值轉(zhuǎn)換成磁場的實際值,實現(xiàn)對磁通門磁力儀的誤差校正。
目前的標(biāo)量校正指的是,將磁通門磁力儀放置于一個均勻的磁場中,則磁場總場為一個定值,根據(jù)誤差校正模型式(3)可得:
BTB=(Bm-b)T(C-1)TC-1(Bm-b)=const
(4)
通過改變磁通門磁力儀的不同姿態(tài),則可以獲得多組測量值,通過標(biāo)量磁力儀可以監(jiān)測背景磁場的總場值,則根據(jù)式(4)可以擬合求出需要校正的各個參數(shù)。
2.2 基于粒子群遺傳算法的校正參數(shù)求解
1995年,Kermey和Ebethart博士根據(jù)鳥群尋找食物的行為,提出了粒子群算法[12-13],粒子群算法的核心體現(xiàn)在單個追蹤粒子通過自身的先前經(jīng)驗和共享集體最優(yōu)信息來實現(xiàn)向最優(yōu)空間搜索。傳統(tǒng)的粒子群優(yōu)化算法具有搜索速度快的優(yōu)點,但是容易陷入局部最優(yōu),因此本文將粒子群遺傳算法應(yīng)用到磁通門磁力儀的誤差校正中,從而實現(xiàn)全局最優(yōu)解的搜索。
首先進行粒子位置和速度的初始化參數(shù)設(shè)置,磁通門磁力儀的誤差校正問題相當(dāng)于9個校正參數(shù)的求解問題,因此位置和速度都是9維空間。假設(shè)粒子群中共有m個粒子,xi=(xi1,xi2,…,xi9)為第i個粒子當(dāng)前的位置矢量,位置矢量中每列代表的參數(shù)分別為kx、ky、kz、bx、by、bz、ψ、φ、θ,vi=(vi1,vi2,…,vi9)為第i個粒子當(dāng)前的速度矢量。粒子的位置矢量即為優(yōu)化問題的潛在解,通過適應(yīng)度函數(shù)f(x)來描述粒子的位置的好壞。磁通門磁力儀誤差校正的適應(yīng)度函數(shù)為:
(5)
式(5)中,Be指的是地磁場的模,可通過標(biāo)量磁力儀測量得到;N為磁通門磁力儀的測量姿態(tài)數(shù)。通過式(5)可得,當(dāng)校正后的磁場值與地磁場的模之間的差值越小,表示校正后的值與地磁場越接近,因此校正效果越好。
pi=(pi1,pi2,…,pi9)為第i個粒子的歷史最優(yōu)位置,個體最優(yōu)位置由下式進行更新計算:

(6)
式(6)中,t代表迭代的次數(shù)。全局最優(yōu)位置p(t)定義為群體中所有粒子目前所經(jīng)歷過的所有狀態(tài)中的最優(yōu)位置,則:
g(t)=min{f(p1(t),f(p2(t),…,f(pm(t)}
(7)
粒子通過自己的個體最佳位置和種群的全局最佳位置決定下一步的飛行方向和距離。粒子的位置和速度根據(jù)以下的公式進行更新:
vi(t+1)=ωvi(t)+c1r1(pi(t)-xi(t))+
c2r3(gi(t)-xi(t))
(8)
xi(t+1)=xi(t)+vi(t+1)
(9)
式(8)、式(9)中,ω為慣性因子,c1和c2為加速因子,r1和r2是[0,1]之間的隨機數(shù)。
上述為傳統(tǒng)的粒子群算法,該算法可以快速收斂得到誤差校正參數(shù),但是容易陷入局部最優(yōu)解,因此本文采用粒子群遺傳算法對校正參數(shù)進行求解,具體做法如下:每次迭代后將粒子按照適應(yīng)度值由小到大進行排序,為保證適應(yīng)度較優(yōu)的粒子個體能存活下來,將適應(yīng)度較優(yōu)的前一半粒子直接進入下一次迭代,將適應(yīng)度較差的后一半粒子進行交叉和變異操作,來防止進入局部最優(yōu),提高算法的全局搜索能力。
3 仿真分析
為了驗證本文所提方法的有效性,設(shè)計仿真實驗進行驗證,仿真實驗條件設(shè)定為假設(shè)將磁通門磁力儀放置于均勻的地磁場中,地磁場的總場大小為51 800 nT,三軸磁通門磁力儀的各個誤差參數(shù)如表1所示。
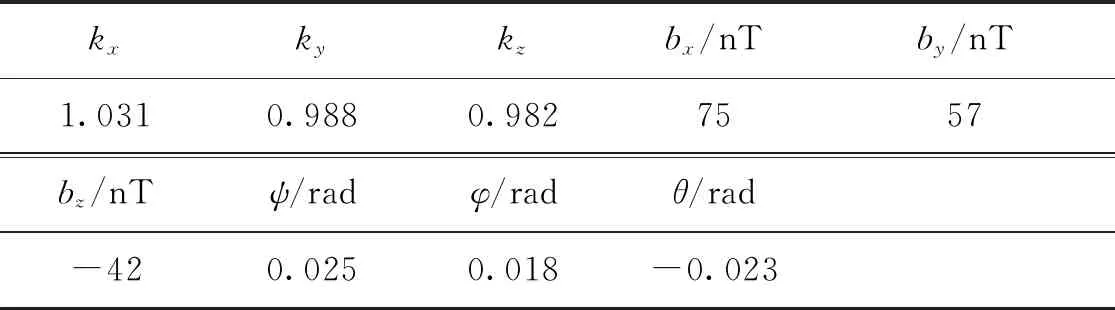
表1 誤差參數(shù)表Tab.1 Error parameters
磁通門磁力儀的精度為0.1 nT,仿真時在磁通門磁力儀的三個測量軸上分別加入方差為0.1 nT的高斯白噪聲,選取200個姿態(tài)下的磁力儀測量數(shù)據(jù),磁通門的原始測量數(shù)據(jù)如圖2所示。由圖2可得,未校正前磁通門磁力儀的測量值誤差較大,在均值為51 800 nT的地磁場中,測量的磁場總場最大偏差值可達到1 862.8 nT,不同狀態(tài)下磁場總場的波動峰峰值為3 511 nT,因此需要對原始測量數(shù)據(jù)進行校正后才能使用。
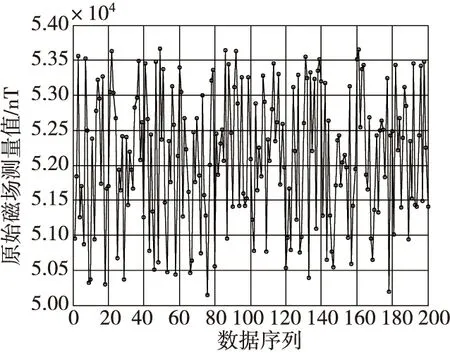
圖2 磁通門磁力儀的原始測量值Fig.2 Raw data measured by fluxgate magnetometer
本文利用粒子群遺傳算法(PSO-GA)和傳統(tǒng)粒子群算法(PSO)分別進行校正參數(shù)的求解。同時為了將本文方法與現(xiàn)有校正方法進行對比,增加了文獻[8]提出的線性化校正方法的校正效果作為對比。
粒子群遺傳算法(PSO-GA)的參數(shù)設(shè)定為,粒子群的數(shù)目為1 000,迭代次數(shù)為100,加速因子c1取1.5,加速因子c2取1.8,慣性因子ω取0.8。仿真結(jié)果如表2所示。表2為利用粒子群遺傳算法和傳統(tǒng)粒子群算法得到的誤差校正參數(shù)。
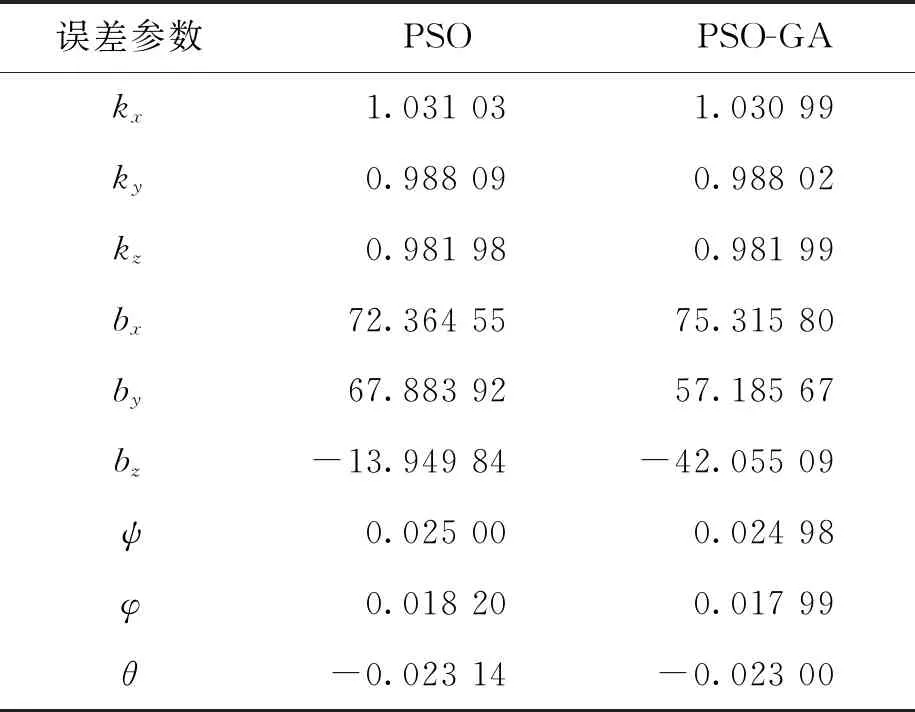
表2 誤差參數(shù)估計值表Tab.2 Estimate value of error parameters
由表2可得,PSO-GA算法計算得到的參數(shù)估計誤差較小,對bx的相對估計誤差最大,為0.42%;PSO算法計算得到的偏置誤差參數(shù)值誤差較大,對bz的相對估計誤差最大,為66.8%。圖3給出了PSO和PSO-GA兩種算法在歷次迭代中適應(yīng)度值的變化,可用于對比兩種算法的收斂性能。
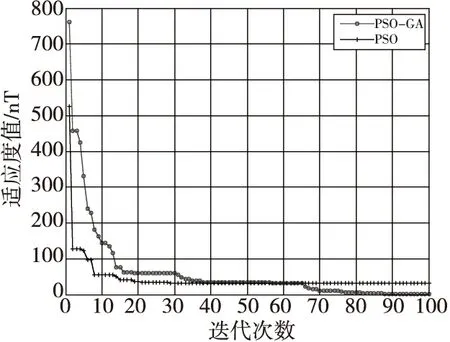
圖3 PSO和PSO-GA兩種算法在歷次迭代中適應(yīng)度值變化Fig.3 The fitness value variation of PSO and PSO-GA algorithm
由圖3可知,總共迭代次數(shù)為100次,傳統(tǒng)的粒子群算法在初期收斂較快,但是未收斂到最小值,且在算法計算的后期便不再進行優(yōu)化;而粒子群遺傳算法從迭代的初期就迅速收斂,并且在算法后期也繼續(xù)收斂,直到達到較小的適應(yīng)度值,因此可以看出PSO-GA可以增加算法的全局最優(yōu)搜索能力。
圖4為不同校正方法對磁場總場校正前后的對比圖。由圖4可得,三種方法均能實現(xiàn)對磁通門磁力儀的誤差校正,但是文獻[8]的線性化校正方法由于忽略了二階小量,因此校正的誤差較大,校正后的磁場總場最大偏差為1 019.6 nT,磁場總場的波動峰峰值為1 335 nT;而PSO-GA算法與PSO算法的校正效果較好,PSO算法對磁場測量值進行校正后的磁場總場最大偏差可達30.5 nT,磁場總場的波動峰峰值為60.4 nT;PSO-GA算法的計算效果更好,校正后的磁場總場最大偏差為1.2 nT,磁場總場的波動峰峰值為2.1 nT,因此基于PSO-GA算法可以提高磁通門磁力儀誤差校正的精度。
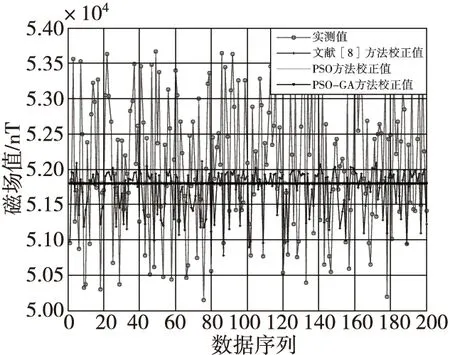
圖4 磁場總場校正前后對比圖Fig.4 Comparison of total magnetic intensity before and after calibration
為了更直觀地顯示三種校正方法的校正效果,我們將磁場三分量的校正值與實際值之差進行比較,結(jié)果如圖5—圖7所示。
由圖5—圖7可得,PSO-GA算法與PSO算法的校正結(jié)果均優(yōu)于文獻[8]校正方法的校正結(jié)果,且文獻[8]中對于Z分量的校正效果較差,校正值與實際值最大的偏差可達-1 019 nT。而PSO-GA算法的各分量校正值與實際值最大的偏差為-1.4 nT。
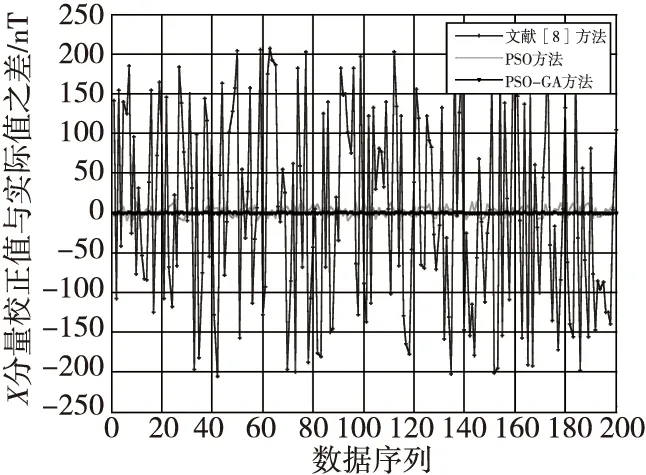
圖5 X分量校正值與實際值之差對比圖Fig.5 Comparison of difference between calibrated X outputs and actual outputs
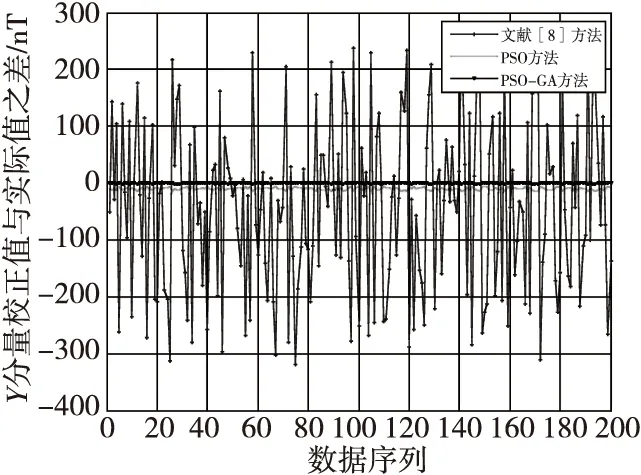
圖6 Y分量校正值與實際值之差對比圖Fig.6 Comparison of difference between calibrated Y outputs and actual outputs
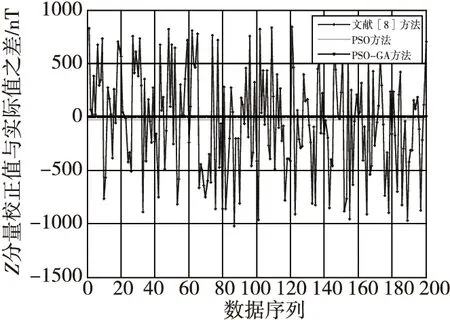
圖7 Z分量校正值與實際值之差對比圖Fig.7 Comparison of difference between calibrated Z outputs and actual outputs
定義均方根誤差的計算公式:
(10)
式(10)中,Bi為磁場的實際值,Bci為磁場的校正值。則根據(jù)式(10)得到不同校正方法的均方根誤差如表3所示。
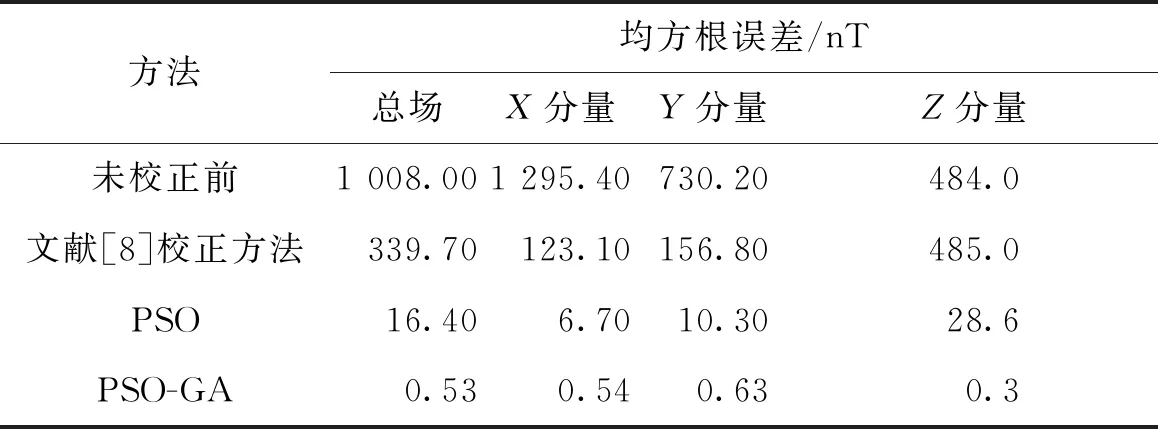
表3 校正前后的均方根誤差對比表Tab.3 Comparison of root-mean-square errors before and after calibration
由表3可得,由于文獻[8]中對誤差模型線性化時假設(shè)Z軸的靈敏度為1,因此通過校正結(jié)果來看,Z軸的校正誤差較大。而本文提出的PSO-GA校正方法,校正后的均方根誤差與仿真實驗時加入的高斯白噪聲在同一量級,因此得出PSO-GA校正方法可以實現(xiàn)對磁通門磁力儀的精確校正。
4 結(jié)論
本文提出了基于粒子群遺傳算法的磁通門誤差校正方法。該方法首先在分析誤差產(chǎn)生機理的基礎(chǔ)上建立了誤差校正模型,隨后利用粒子群遺傳算法來求解校正參數(shù),該算法通過對粒子群中的適應(yīng)度較差的粒子進行交叉、變異操作來增加算法的全局最優(yōu)搜索能力。分別利用傳統(tǒng)粒子群算法和粒子群遺傳算法對磁通門磁力儀的誤差進行了校正仿真實驗。仿真實驗結(jié)果表明,與傳統(tǒng)的粒子群優(yōu)化算法相比,基于粒子群遺傳算法的誤差校正能快速地收斂,且具有較強的全局最優(yōu)搜索能力,可以實現(xiàn)對磁通門磁力儀的高精度校正。
猜你喜歡
當(dāng)代陜西(2022年6期)2022-04-19 12:11:54
娃娃樂園·綜合智能(2021年12期)2022-01-18 05:46:42
華人時刊(2020年13期)2020-09-25 08:21:42
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2020年1期)2020-02-20 13:22:30
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
中學(xué)生數(shù)理化·高二版(2016年12期)2017-02-28 10:08:42
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
