基于無人機平臺的迭代時差定位方法
2021-07-21 09:05:44蘇若龍鄭先寶
火控雷達(dá)技術(shù) 2021年2期
蘇若龍 白 昊 鄭先寶
(西安電子工程研究所 西安 710100)
0 引言
由于時差定位具有定位精度高、定位速度快等優(yōu)點,因此時差定位已成為高精度定位技術(shù)所采用的主要技術(shù)方案[1]。時差定位實質(zhì)上是利用輻射源到各定位站時間差(TDOA)解算輻射源位置信息的過程,因此得到正確的時差是時差定位的基礎(chǔ)。然而隨著雷達(dá)技術(shù)的不斷發(fā)展越來越多的新體制雷達(dá)使用了高重頻信號,這就導(dǎo)致脈沖配對過程中出現(xiàn)模糊從而出現(xiàn)多個定位結(jié)果,因此如何避免脈沖配對模糊已經(jīng)成為時差定位亟待解決的問題[2]。針對這一問題文獻(xiàn)[3]利用雷達(dá)解距離模糊的原理提出一種算法來解高重頻模糊,但是此方法在輻射源信號重頻出現(xiàn)公倍數(shù)時則仍會模糊。文獻(xiàn)[4]、文獻(xiàn)[5]提出測向與時差相結(jié)合的解模糊算法,通過測向結(jié)果將定位區(qū)劃分為不同的區(qū)域以達(dá)到解模糊的目的。這種方法需要增加額外的測角設(shè)備,提升了系統(tǒng)復(fù)雜度不適用于無人機平臺。此外文獻(xiàn)[6]還提出一種統(tǒng)計直方圖峰值檢測的方法解模糊,但是這種方法需要較長時間的累積,不能達(dá)到快速定位的要求。上述文獻(xiàn)都是通過輔助信息剔除模糊解得到真實輻射源位置信息,本文從時差定位原理出發(fā)結(jié)合無人機載平臺的特點提出一種迭代時差定位方法,在脈沖配對過程中直接解決高重頻模糊問題。
1 無人機載時差定位系統(tǒng)分析
無人機載時差定位系統(tǒng)的大致工作流程如圖1所示,各定位站對輻射源信號進行測量得到偵察數(shù)據(jù),并將測量得到的偵察數(shù)據(jù)送入定位主站。主站對偵察數(shù)據(jù)進行分選以及輻射源庫匹配,根據(jù)匹配結(jié)果進行對TOA進行脈沖配對及時差配對得到時差信息。最終利用時差定位算法解算出目標(biāo)位置信息,并根據(jù)濾波算法對定位結(jié)果進行濾波跟蹤。本文主要研究脈沖配對以及目標(biāo)定位兩部分,對其余部分不做贅述。

圖1 無人機載時差定位處理流程圖
1.1 脈沖配對原理及脈沖配對模糊
圖2是一種典型的無人機三站時差定位場景。
由圖2中的位置關(guān)系可知,輻射源與三個定位站之間的距離分別為R0、R1、R2,主站與兩輔助站的距離分別為d1、d2。以定位主站與輔助站1為例,根據(jù)三角形的基本定理滿足公式(1)。
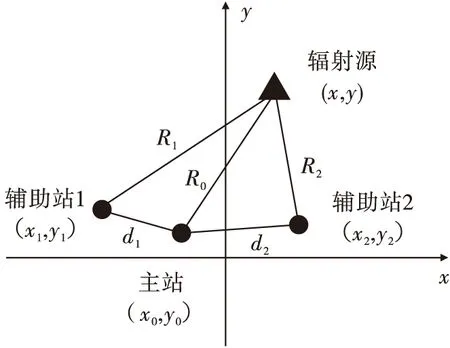
圖2 無人機載三站時差定位場景
d1≥|R1-R0|
(1)
由式(1)可知主站與輔助站1之間的時差Δt1的范圍為
(2)
其中,c為光速。
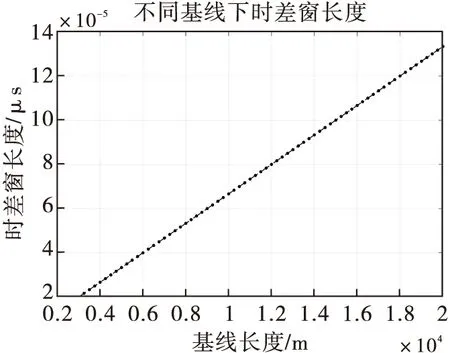
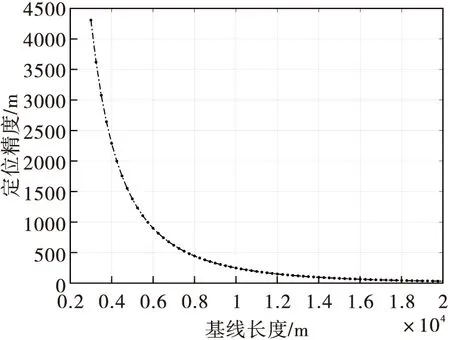
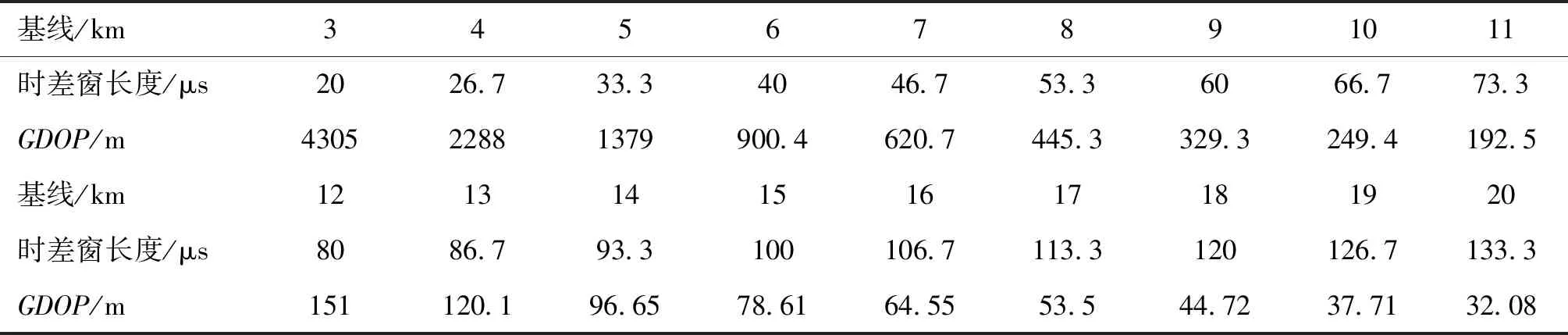
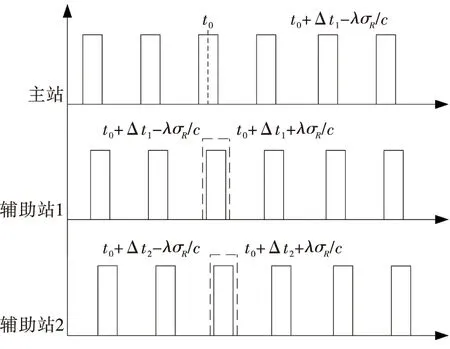
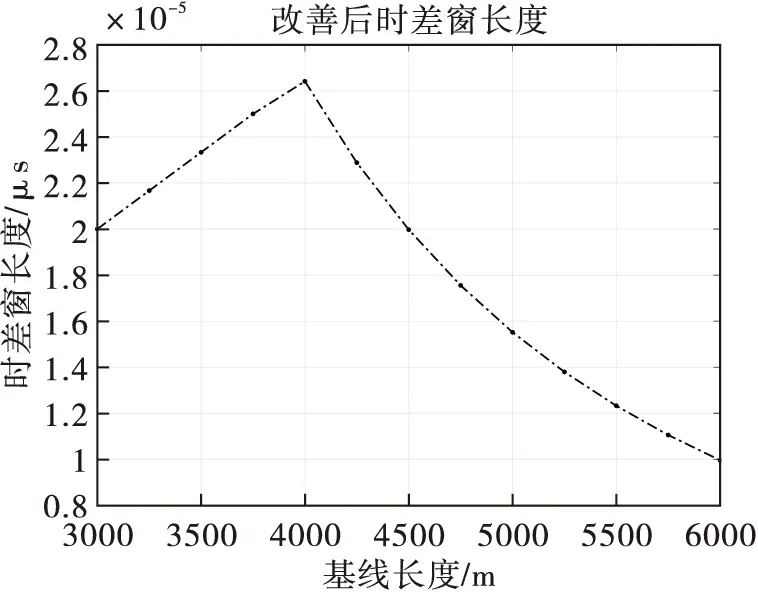
脈沖配對即以主站接收脈沖的到達(dá)時間為基準(zhǔn),在[-d1/c,d1/c]內(nèi)尋找與之配對的輔助站脈沖(w1=2d1/c為時差窗長度)。當(dāng)輻射源發(fā)射信號的重復(fù)周期PRI≥w1時,時差窗內(nèi)只存在一個脈沖,此時脈沖配對結(jié)果唯一如圖3(a)所示。當(dāng)PRI 圖3 脈沖配對示意圖 根據(jù)式(2)定義可知時差窗的大小與基線的長短呈線性關(guān)系,如圖4所示。 圖4 不同基線下時差窗長度 本文所使用的時差定位算法為Chan算法,定位站與輻射源位置如圖2所示。輻射源到主站及兩個輔助站之間的距離為 (3) 輻射源到主站與兩個輔助站的距離差為 ΔRi=Ri-R0i=1,2 (4) 將式(3)帶入式(4)中并將其寫為矩陣形式為 AX=F (5) 式(5)中 (6) 則通過對矩陣A求逆(A無逆時可求偽逆),可以得到 (7) 令A(yù)-1=[aij]i=1,2;j=1,2對式(7)進行化簡可得 (8) 式(8)中,mi=ai1k1+ai2k2,ni=ai1ΔR1+ai2ΔR2(i=1,2)。 將式(8)帶入式(3)中R0的表達(dá)式,可得 (9) 式(9)中, (10) 通過式(9)的一元二次方程可以解出R0,將解出的R0帶入式(8)中即可解得輻射源的位置信息。 時差定位的定位精度通常使用GDOP (Geometrical Dilution Of Precision)表示,其值越小則定位精度越高,反之則定位精度越差。其表達(dá)式為 (11) 其中,σx,σy為定位誤差在x,y方向上的方差。 通過對式(4)求微分并將微分結(jié)果寫為矩陣形式可得 dΔR=F·dR+dS (12) 其中dΔR為各個定位站之間時間測量誤差引起的定位誤差;F為輻射源與各定位站之間的方向余弦,與定位站與輻射源的位置有關(guān);dR為定位誤差;dS為定位站的站址誤差。 則通過計算可得到定位誤差值為 dR=(FTF)-1FT(dΔR-dS) (13) 從式(13)中可知定位誤差與站址誤差以及時差測量誤差有關(guān)。假定時差測量誤差在修正后為零均值,站址誤差在測量過程中不變且各站之間的站址誤差之間互不相關(guān),則可以得到定位的協(xié)方差矩陣為 P=E[dR·dRT]=C{E[dΔR·dΔRT]+ (14) 令[eij]=E[dΔR·dΔRT]+E[dS·dST]: (15) 其中,σΔRi為時差測量引起的第i站與主站的距離差的標(biāo)準(zhǔn)差,ηij為dΔRi與dΔRj的相關(guān)系數(shù),σs為站址誤差的方差。令C=[cij],P=[pij],則有 (16) 則根據(jù)GDOP的定義可得 (17) 令定位主站為坐標(biāo)原點,主站與兩輔助站之間基線之間的夾角為60°且基線相同,時差測量誤差20ns,站址誤差30m,輻射源位于(-2000m,30000m)處,定位區(qū)域位為X軸(-10000m,10000m)Y軸(0,40000m)。在上述場景下對定位基線3km到20km進行仿真,得到整個定位區(qū)域的定位精度(GDOP)如圖5所示,輻射源位置處的定位精度(GDOP)如圖6所示。圖5中三角形為定位站,*為目標(biāo)輻射源所在位置。從仿真結(jié)果可以看出基線越短定位精度越差,隨著基線的不斷拉升定位精度逐漸提高最終收斂至零附近。 圖5 定位區(qū)域定位精度仿真結(jié)果 圖6 不同基線下輻射源位置處定位精度 經(jīng)過第一節(jié)分析發(fā)現(xiàn)系統(tǒng)的抗高重頻模糊能力與定位精度均與定位基線有關(guān),將圖4、圖6中的數(shù)據(jù)列入表1中。結(jié)合表1中數(shù)據(jù)以及第一節(jié)分析,如果需要提高系統(tǒng)抗高重頻能力,就需要將縮短定位基線但定位基線的縮短會導(dǎo)致定位精度變差。針對這一問題本文提出一種新的迭代定位方法,通過改進脈沖配對算法解決這一矛盾,使系統(tǒng)在具備較高定位精度的同時具備較好的抗高重頻能力。 表1 不同基線下精度及時差窗長度 傳統(tǒng)脈沖配對方法以主站脈沖到達(dá)時間t0作為基準(zhǔn)進行配對,輔助站中與該脈沖對應(yīng)的匹配脈沖出現(xiàn)在t0+Δt處(Δt由輻射源與主站和輔助站距離差決定)處。在脈沖配對的過程中如果能得到Δt,則可直接與t0+Δt處脈沖進行配對,無需按照時差窗進行搜索。然而根據(jù)1.2節(jié)的分析在實際定位過程會存在一些誤差導(dǎo)致由定位結(jié)果計算得到時差Δt′≠Δt,因此根據(jù)定位精度的概念將GDOP的值σR放大λ(λ>1)倍作為時差窗長度進行脈沖配對,如圖7所示。 圖7 迭代法脈沖配對示意圖 初次定位時沒有先驗信息來計算時差Δt′,因此初次定位時仍可使用傳統(tǒng)方法。初次定位得到定位結(jié)果后,后續(xù)每次定位可使用前一次定位結(jié)果計算Δt′進行脈沖配對。在表2的仿真場景下,分別對傳統(tǒng)方法的定位方法以及本文的時差定位時差窗長度進行仿真,仿真結(jié)果如圖8所示。 表2 仿真參數(shù)表 圖8 傳統(tǒng)算法與本文算法時差窗對比 圖中圓圈為傳統(tǒng)算法時差窗長度,三角形為本文算法的時差窗長度,可看出首次定位時由于缺乏相應(yīng)的先驗信息兩種算法時差窗長度相同。隨著基線的不斷拉長,傳統(tǒng)算法的時差窗長度隨著基線不斷變長而本文算法的時差窗長度逐漸收斂至零。在定位基線小于4km時由于基線過短定位精度較差本文算法的時差長度大于傳統(tǒng)算法的時差窗長度即抗高重頻能力較差。當(dāng)基線大于4km時隨著定位精度的提升,本文提出的算法得到的時差窗長度逐漸減小并小于傳統(tǒng)算法。 針對上述仿真發(fā)現(xiàn)的問題使用以下方法對算法進行改進。在短基線下將本文算法與傳統(tǒng)算法的時差窗進行比較選擇較短的作為脈沖配對時差窗;現(xiàn)實情況中由于其他因素影響定位參數(shù)存在抖動,因此會出現(xiàn)多個定位結(jié)果。使用卡爾曼濾波對結(jié)果進行濾波使用濾波結(jié)果作為最終的定位結(jié)果,可以一定程度上消除參數(shù)抖動引起誤差;并且當(dāng)定位精度達(dá)到要求時,不再迭代更新時差窗長度,防止因時差窗過小導(dǎo)致脈沖配對失敗。改進后的算法步驟如下所示: 1)測量輻射源到各定位站的TOA(初次定位基線可根據(jù)輻射源的PRI靈活選取),若為初次定位則執(zhí)行2)否則執(zhí)行3); 2)使用傳統(tǒng)方法進行脈沖配對并計算時差; 3)對比當(dāng)前基線下本文算法與傳統(tǒng)法時差窗長度,選擇時差窗較短的方法進行脈沖配對; 4)根據(jù)配對結(jié)果進行定位并對定位結(jié)果進行濾波,計算定位精度GDOP的值σR; 5)判斷定位精度是否能達(dá)到所需要求,如精度未達(dá)到要求則拉升定位基線d進行下一次定位,否則保持基線不變對輻射源進行持續(xù)定位; 6)根據(jù)需要改變基線d,并執(zhí)行1)。 在表2所示的仿真場景中使用改進后的算法進行仿真得到時差窗長度與定位精度(當(dāng)定位精度高于3%R認(rèn)為定位精度達(dá)到要求),得到的仿真結(jié)果如圖9,圖10所示。 圖9 改善后時差窗長度 從圖9中可看出當(dāng)定位基線小于4km時定位精度較差,此時使用傳統(tǒng)脈沖配對法此時時差窗長度為2L/c。當(dāng)定位基線大于4km時,由于基線的提升定位精度逐漸變高,此時使用本文算法進行脈沖配對時差窗長度為λσR。當(dāng)定位基線為6km時相對定位精度為2.9%R達(dá)到要求(3%R),因此在6km基線下對目標(biāo)進行持續(xù)定位不再提升定位基線。對比表1中的數(shù)據(jù),如果使用傳統(tǒng)方法進行定位則定位系統(tǒng)的最小不模糊PRI為40μs,而使用本文算法定位系統(tǒng)的最小不模糊PRI僅為26.4μs,相較傳統(tǒng)算法本文提出的算法將系統(tǒng)的抗高重頻模糊能力提升約了一倍。并且從仿真結(jié)果可以看出本文提出的方法,在提高了系統(tǒng)抗高重頻模糊的能力的同時將系統(tǒng)抗高重頻模糊能力與定位精度有機結(jié)合,做到在較長基線下既有較高的定位精度又有較好抗高重頻干擾能力。 隨著電子戰(zhàn)在現(xiàn)代戰(zhàn)爭中地位以及作用的不斷提高,時差定位也扮演者越來越重要的角色,然而如何抗高重頻模糊一直是困擾時差定位發(fā)展的難題之一。本文以無人機時差定位作為應(yīng)用場景,從時差定位的原理、定位精度以及脈沖匹配的原理出發(fā),通過分析定位精度與脈沖配對時差窗之間的關(guān)系,提出一種迭代的定位方法。并分別對該方法以及傳統(tǒng)方法進行了仿真實驗,通過對比仿真結(jié)果發(fā)現(xiàn)該方法將定位基線與定位精度及時差窗長度有機結(jié)合,解決了系統(tǒng)定位精度與抗高重頻模糊能力隨基線變化的矛盾,在時差定位系統(tǒng)抗高重頻模糊的能力的同時也具備較高的定位精度。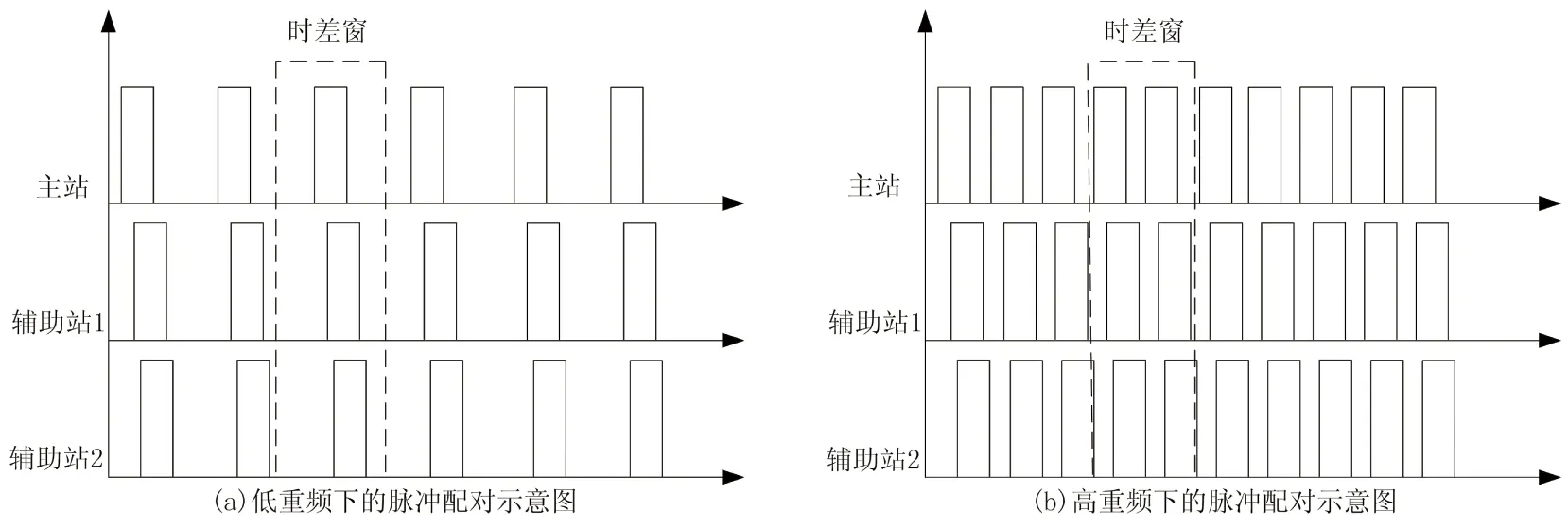
1.2 定位算法及誤差分析[8-9]
E[dS·dST]}CT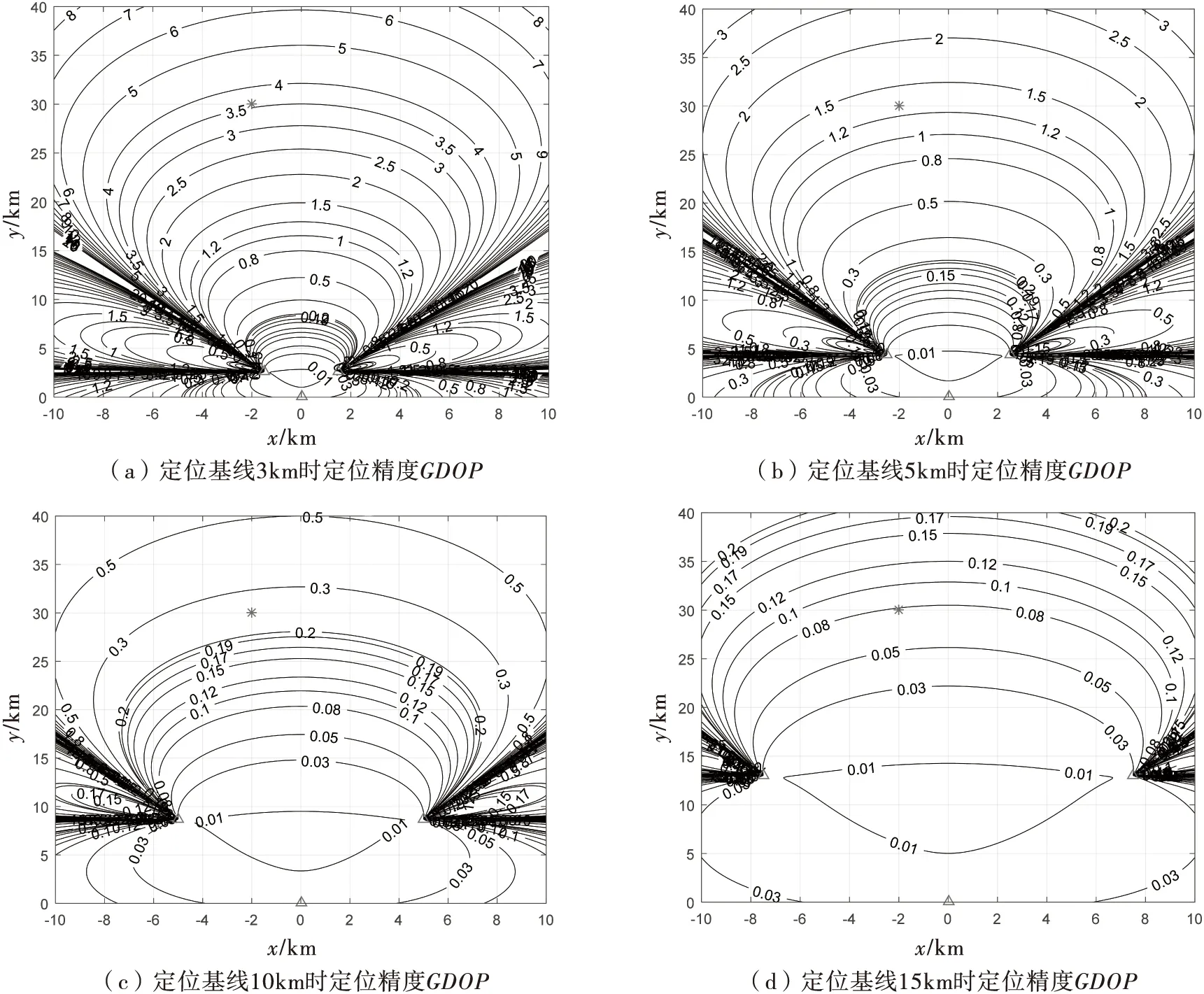
2 迭代時差定位方法


3 結(jié)束語
