無速度傳感器調速系統控制策略
2021-07-22 07:07:40李鍇趙修瑞
電子測試 2021年12期
關鍵詞:模型
李鍇,趙修瑞
(黑龍江科技大學研究生學院,黑龍江哈爾濱,150000)
0 引言
在目前的交流調速系統中,光電脈沖編碼器或測速發電機多被用于進行速度測量。但是高精度的速度傳感器不僅價格昂貴,而且還存在使系統易受環境影響、降低系統的機械可靠性等缺陷。因此為了克服安裝傳統速度傳感器的不足,無速度傳感器技術必然將成為一種主流的趨勢,無速度傳感器的控制系統不僅節省了設備,而且避免速度傳感器使用可能帶來的誤差。針對無速度傳感器系統動態控制性能方面的優勢,采用模型參考自適應法來設計速度觀測器,并通過MATLAB/Simulink 仿真工具無速度傳感器轉速辨識問題以及磁鏈觀測問題進行了研究。
1 電機調速控制系統
用一種基于電壓模型具有限幅補償功能的新型定子磁鏈觀測器,去解決傳統磁鏈觀測器在低速時辨識精度低的問題。采用低通濾波器作為純積分器的替代,可以解決直流偏置所造成的誤差累積問題。采用低通濾波器的磁鏈觀測模型可表示為:

(1)式中,ψs(s)、e( s)分別為定子磁鏈、反電動勢的拉普拉斯變換,ωc為截至頻率。
倘若其輸入信號為正弦信號Aωsinωt,且信號初始值為0,并拉普拉斯反變換可以得到:

并采用具有限定補償環節的磁鏈觀測器,如圖1-1所示。由于采用了兩次坐標變換,因此磁鏈的相位并沒有發生改變;同時由于加入了磁鏈幅值補償環節,也避免了幅值衰減問題的出現。當電機在高速運行時,ω遠大于ωc,ωc可以忽略不計。此時補償增益約等于0,磁鏈觀測器等同于一階低通濾波器。由此可見,具有限定補償環節的磁鏈觀測器無論在低速段還是在高速段,都能夠精確的觀測定子磁鏈[7]。
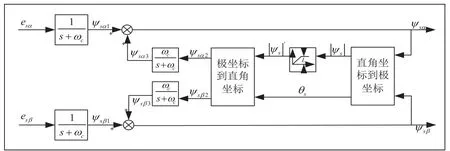
圖1 具有限定補償環節的磁鏈觀測器
1.1 模型參考自適應法
模型參考自適應法辨識速度的主要思想是,對同一控制對象,將不含未知參數的數學模型作為參考模型,而將含有待估算參數的數學模型作為可調節模型,兩個模型應該具有相同物理意義的輸出量。本設計選用不含轉速信息的電壓模型作為參考模型,含有轉速信息的電流模型作為可調模型,比例積分作為自適應規律,以此建立并聯結構的模型參考自適應系統。
2 仿真結果與分析
設置電機初始轉速為1400r/min,在0.5S時轉速由1400r/min突變為200r/min;設置電機給定啟動轉矩初始值為10N?m,在0.3S時突加60N?m負載,則磁鏈波形如圖2所示。
從圖2中可以看到該異步電動機直接轉矩控制系統的定子磁鏈波形接近于圓形。說明本文設計的具有幅值限定補償功能的定子磁鏈觀測器觀測精度較高。
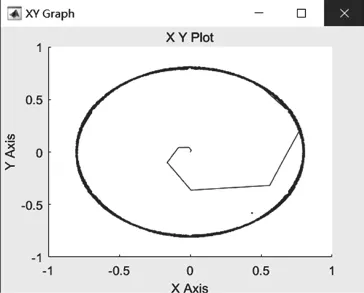
圖2 定子磁鏈運動軌跡
三相定子電流如圖3所示。三相定子電流波形雖然在電機剛啟動時有著較大的波動,但是也在0.25s內穩定了下來,由此可以看出系統響應速度很快。在約0.15s時刻,電機速度達到給定值,此時三相定子電流也突變到另一個值,并且很快穩定;0.3s時刻,給定轉矩從10N?m突變到60N?m,三相定子電流突變到另一個值,同樣也很快地穩定;到0.5s時刻,給定轉速從1400r/min突變到400r/min,三相定子電流再次突變到另一個值,經過約0.08s后,穩定下來。
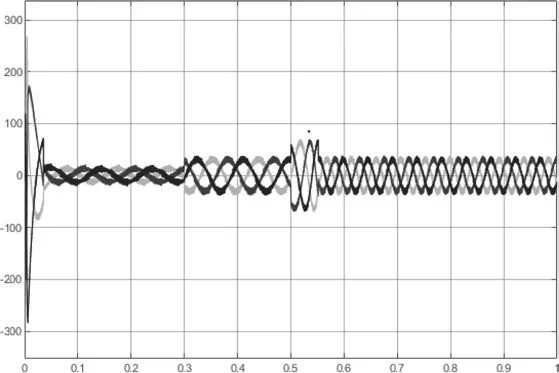
圖3 三相定子電流
電機實際轉矩轉矩估計值的波形圖如圖4所示。由上圖可以看出轉矩估計值與電機實際轉矩幾乎無差別,檢驗了仿真的準確性。
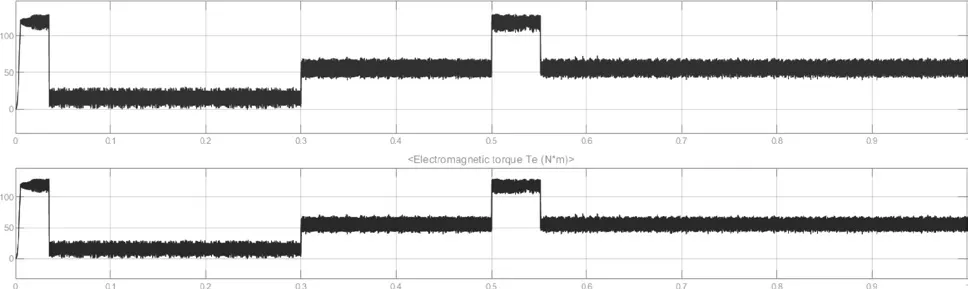
圖4 實際轉矩和轉矩估計值
3 總結
本設計對異步電機在低頻條件下的控制效率進行研究提出一種基于電壓模型具有限幅補償功能的新型定子磁鏈觀測器,并采用模型參考自適應速度觀測算法,去實現對速度的辨識,不僅大大降低成本,而且避免大量電資源的浪費,對電機節能提供了新思路,具有很大的發展前景。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
