一種非接觸式測量簡單物體形態的裝置
2021-07-22 07:07:42張萌谷櫟娜張通
電子測試 2021年12期
張萌,谷櫟娜,張通
(石家莊工程職業學院,河北石家莊,050061)
0 引言
隨著計算機信息技術的快速發展,人工智能、大數據、云計算和物聯網的未來發展,圖像識別作為AI技術的支撐,被廣泛應用于眾多的領域。例如:導航、地圖與地形配準、自然資源分析、天氣預報、環境監測等。在人們日常生活、工作中也離不開圖像識別技術。圖像識別是計算機對圖像進行處理、分析和理解,以識別各種不同模式的目標和對像的技術。
本文所研究的非接觸物體尺寸形態測量就是利用STM32單片機對OV7725攝像頭采集的圖像進行預處理、分割、特征提取和判斷匹配,最后獲得物體的形狀、大小以及該物體的距離。
1 總體方案部分
1.1 系統設計原理
本文設計的非接觸式物體形態測量裝置,包括兩部分:形態識別部分,測距部分。系統總體設計框圖如圖1所示。

圖1 系統總體設計框圖
形態識別部分利用OV7725攝像頭模塊采集目標物的圖像信息,并傳到STM32F429單片機,由單片機對采集到的圖像信息進行灰度、二值化處理,并獲得二值圖像數據。
測距部分利用超聲波測距設備測量目標物和攝像頭之間的距離,并將測量的數據顯示到TFT-LCD顯示器上。
再結合二值圖像數據和目標物與攝像頭之間的距離,利用像素分析算法進行分析處理,獲得目標物的尺寸、面積、形狀信息,最后傳輸給TFT-LCD顯示屏進行顯示。
1.2 方案論證
1.2.1 主控芯片選擇
根據系統性能要求,單片機主要進行系統控制、圖像處理和識別算法運算,需選用運行速度快、功能強大的控制器。因此采用STM32F429單片機作為主控單片機,其容量大,處理速度快,最高主頻達到180MHz。除此之外,芯片內嵌資源豐富,8個串口、16個定時器,3個ADC共24通道,2個DAC,DCMI攝像接口百兆以太網,全速USB OTG、高速USB OTG。
1.2.2 測距傳感器選擇
為了精確的測量物體的距離,本設計采用超聲波傳感器。它是將超聲波信號轉換成其他能量信號(通常是電信號)的傳感器。超聲波具有指向性強、能量消耗緩慢、傳播距離相對較遠等特點,因此常被用于非接觸測距。超聲波測距對環境有較好的適應能力,此外超聲波測量在實時、精度、價格也能得到很好的折衷。
1.2.3 圖像采集方案的選擇
根據系統功能要求,關于圖像采集采用的是ATK-OV7725攝像頭模塊。
ATK-OV7725攝像頭模塊具有8位數據接口,SCCB控制接口,輸出格式有RGB、RawRGB,接口簡單,使用方便,支持各種尺寸輸出,支持圖像縮放、平移和窗口設置等優點。通過攝像頭對目標物進行圖像識別,速度快、方便一次成型但對軟件控制能力要求較高。
1.2.4 顯示裝置的選擇
為了更好地觀察測量的數據,顯示裝置采用的是TFTLCD顯示屏模塊。
TFT-LCD顯示屏模塊800480是一款4.3寸高清全視角彩色TFT液晶屏,分辨率高達800×400,顯示方向為橫屏顯示的TFT液晶屏。上下左右四個方向均可達到80度可視角度。產品接口為24bit RGB接口,自帶升壓電路,驅動電壓為3.3V。高端人機界面用TFT液晶屏。
2 理論分析與計算
2.1 目標物面積計算
非接觸式物體形態測量裝置選用480mm×800mm的TFTLCD顯示屏,采集的目標物圖像尺寸為320mm×240mm,為了減小誤差,截取中心部分120mm×120mm區域為分析對象。
首先,采集背景板1m×1m的圖像,經過計算分析,當背景板和攝像頭之間的距離為l1時,獲得其像素點總個數,記為n1;
其次,采集目標物的圖像,經過灰度、二值化處理后,統計目標物像素個數,記為n2;由超聲波測距部分測得目標物和攝像頭之間的距離為l2時,則通過分析計算,求得目標物體積S為:
需要經過多次測量,對目標物像素點個數進行校正,以保證對目標物面積計算的準確性。
2.2 目標物形態分析
根據目標物的形態特征,結合對目標物像素點的個數分析,從而判斷目標物的形態。
將像素點看成矩陣,進行分析。
首先取目標物中心位置的像素點個數,記為num-mid;
從中心位置往上n行,取像素點個數,記為num-highn;
從中心位置往下n行,取像素點個數,記為num-lown;
如果num-mid=num-highn=num-lown,則符合正方形的形態特征(允許誤差在5個像素點以內);
如 果 num-mid>num-highn,nummid>num-lown,則符合圓的形態特征(允許誤差在5個像素點以內);
如果num-lown>num-mid>num-highn,則符合三角形的形態特征(允許誤差在5個像素點以內);
經多次取值,對目標物形態特征進行多次驗證,從而準確判斷出目標物形態。
2.3 目標物邊長計算
已知目標物面積和形態,則可以理論推導出目標物的尺寸(邊長或直徑)。
2.4 中心點對正調試
由攝像頭獲取目標物圖像,根據目標物圖像像素點在顯示屏120mm×120mm區域內的總數進行分析調整,通過行列掃描,判斷出目標物的偏移位置,從而獲取目標物中心點的位置,由云臺驅動激光點進行中心點對正調整。
3 系統軟件設計
非接觸式物體形態測量裝置是由STM32F429單片機作為主控芯片,將ATK-OV7725攝像頭模塊對目標物進行圖像采集,并將采集的信息傳輸給單片機進行數據處理和分析。同時,STM32F429單片機控制測距模塊,獲得目標物與測量頭的距離,距離結合目標圖像數據,獲取目標圖像像素點的面積,進而利用相關算法推算出目標形狀、尺寸。
非接觸式物體形態測量裝置原理圖,如圖2所示。
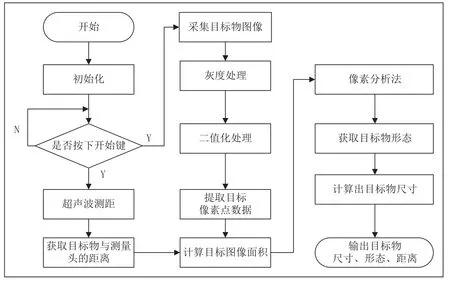
圖2 非接觸式物體形態測量裝置原理圖
4 測試方案與測試結果
4.1 測試方案
系統測試需要分別對硬件、軟件以及整個系統進行測試。硬件測試包括對云臺的測試、整個系統上電后的運行測試為主。軟件測試主要對寫好的程序進行仿真運行。軟硬件的測試做好以后,進行整機調試。整機調試非常關鍵,要進行不斷調試,讓軟件和硬件完美結合,這樣才能達到預期的效果。
4.2 測試結果
非接觸式物體形態測量裝置能夠準確的識別一些簡單物體的形狀,同時也能精確地計算該物體的大小。在整個測試過程中,該裝置不夠穩定,略微有些晃動,但不影響最終的測試結果。
5 總結
本系統使用了STM32芯片搭建了擁有高速處理能力、低成本的非接觸式物體形態測量的硬件平臺。
非接觸式物體形態測量裝置已制作完成,目前能夠測試一些簡單形狀的物體。在實際運行中可能還會出現許多未曾考慮到的問題,有待于進一步完善。下一步的具體工作主要有:優化軟件流程,加快執行速度,對于不同形狀的物體識別方面更優化、更準確;優化硬件結構,使云臺運動更自如,選取更合適的攝像頭增強其環境適用性,最大限度降低環境影響采集數據的準確性。
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年12期)2018-08-01 00:48:04
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
電子制作(2017年19期)2017-02-02 07:08:27
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
