基于PSD的非接觸式二維動態(tài)角度精密測量系統(tǒng)
2021-07-23 09:27:30董文博肖愛民于夢溪葛文奇何建國
激光與紅外 2021年6期
李 波,董文博,3,肖愛民,于夢溪,葛文奇,何建國
(1.中國科學(xué)院空間應(yīng)用工程與技術(shù)中心,北京 100094;2.中國科學(xué)院大學(xué),北京 101408;3.中國科學(xué)院太空應(yīng)用重點(diǎn)實(shí)驗(yàn)室,北京 100094;中國科學(xué)院空天信息研究院,北京 100094)
1 引 言
非接觸式角度測量廣泛用于機(jī)械制造、精密測量[1]、運(yùn)動控制、航空航天[2]等領(lǐng)域。在一種用于二維高速擺鏡的研發(fā)和測試系統(tǒng)中,要實(shí)現(xiàn)范圍±10°、精度0.001°、采樣速率大于80 kHz量級的角度動態(tài)測量指標(biāo)。其關(guān)鍵問題在于系統(tǒng)不僅需要能測量大范圍的二維角度,而且在大角度范圍區(qū)間內(nèi)要滿足0.001°的精度要求,同時,系統(tǒng)需要實(shí)現(xiàn)高速率的角度測量。目前,尚沒有成熟的方案可以滿足以上的要求,必須進(jìn)行創(chuàng)新設(shè)計(jì),實(shí)現(xiàn)基于光電測量和視覺測量的大范圍高精度高速率的動態(tài)角度測量。
通過調(diào)研,角度的測量技術(shù)已經(jīng)發(fā)展的較為完備。角度的測量可分為靜態(tài)角度測量和動態(tài)角度測量兩種[3]。傳統(tǒng)的角度測量方法主要包括機(jī)械式和電磁式,雖然應(yīng)用于很多場合,但是大部分都是接觸式測量,測量精度也受到限制。隨著光電技術(shù)的發(fā)展,傳統(tǒng)光學(xué)方法與光電接收器件相結(jié)合的光電測角方法,由于其精度高、可靠性高、實(shí)現(xiàn)簡單、體積小、質(zhì)量輕、可維護(hù)性好,在測角領(lǐng)域中得到了廣泛的應(yīng)用[4]。動態(tài)光電測量一般有以下幾種方式:基于PSD的測量、基于四象限的測量和基于CCD的測量。
2019年,上海科學(xué)院[5]采用PSD測量,指標(biāo)可以達(dá)到±2°范圍內(nèi)0.02°左右精度,頻率達(dá)到200 Hz,其應(yīng)用也是用于類似場合。文獻(xiàn)[6]中等利用二維PSD激光自準(zhǔn)直原理動態(tài)測量三自由度轉(zhuǎn)角,結(jié)果表明,測量范圍為±1°,響應(yīng)頻率為4 kHz,靜態(tài)測試誤差為0.35′,動態(tài)測試誤差為0.36′。2016年,文獻(xiàn)[7]中利用PSD實(shí)現(xiàn)了測量范圍±1200 arcsec,分辨率達(dá)到0.473 %和0.632 %,其只測量了靜態(tài)精度,且沒有頻率指標(biāo)。
2018年,中科院空間應(yīng)用中心,文獻(xiàn)[8]中對空間運(yùn)動體的六自由度測量,達(dá)到角度范圍2.5°,精度0.1°,速率250 Hz的水平。2017年,中科院空間應(yīng)用中心公開了《六自由度位姿測量方法及裝置》的專利。其他近年也未發(fā)現(xiàn)專門用于激光雷達(dá)二維轉(zhuǎn)角測量的的專利或論文。
浙江大學(xué)在文獻(xiàn)[9]中采用四象限方法進(jìn)行角度測量,測量范圍±500 arcsec,分辨率達(dá)到0.1 arcsec。2005年、2006年,日本Niigata大學(xué)Takamasa Suzuk[10-11],采用和浙江大學(xué)論文類似的方法。
文獻(xiàn)[12]中提出了一種基于CCD成像的檢測光學(xué)系統(tǒng)測角精度的方法。其精度達(dá)到亞像素級,標(biāo)定誤差小于0.0167°。文獻(xiàn)[13]利用特定的二維衍射光柵貼附于被測平面上,CCD得到平面傾角變化前后的衍射圖像,通過條紋分析得到被測面傾角的變化,其測量準(zhǔn)確度可達(dá)0.06°,可測量20°范圍內(nèi)的二維平面傾角。
總之,四象限的測量可以實(shí)現(xiàn)大范圍二維角度測量,但是四象限測量要求激光器為圓形光斑,而PSD測量對光斑無嚴(yán)格要求,其只與光的能量中心位置有關(guān),且四象限探測器象限之間存在死區(qū),而PSD光敏面無需分割,不存在死區(qū),可實(shí)現(xiàn)連續(xù)的光斑位置測量,位置分辨率高。CCD可以實(shí)現(xiàn)高精度角度測量,但是CCD測量需要逐幀采集圖像,而系統(tǒng)需要達(dá)到至少80KHz的采樣速率,顯然CCD無法實(shí)時采集和處理如此龐大數(shù)據(jù)量的圖像。
因此,四象限探測器可以高精度地反映光斑中心的位置變化,常用于定位對準(zhǔn);CCD測量適用于在采樣速率要求較低的場合實(shí)現(xiàn)高精度的動態(tài)角度測量。而需要實(shí)現(xiàn)大范圍的連續(xù)角度測量,且滿足高速率高精度的要求,二維PSD是最合適的探測元件。而過去的二維PSD的測量雖然能夠達(dá)到較高的速率,但其測量精度有待提高。
本課題設(shè)計(jì)了創(chuàng)新方法,采用PSD方式實(shí)現(xiàn)了大動態(tài)范圍的高精度角度測量。首先,采用高精度的激光器和PSD,保證系統(tǒng)精度,PSD大面積的光敏面保證能測量大角度范圍,通過光路聚焦方法,提高PSD敏感精度;其次采用FPGA和高速AD采集板實(shí)現(xiàn)了125 kHz高速數(shù)據(jù)采樣,再利用數(shù)字濾波的方法保證300 Hz工作頻率達(dá)到0.001°的低噪聲,滿足隨機(jī)誤差指標(biāo);對于任何測量系統(tǒng)都不可避免存在系統(tǒng)誤差,本文用極高精度的位移臺對測量系統(tǒng)進(jìn)行±10°連續(xù)的矩形角度范圍進(jìn)行標(biāo)定,采用二維插值算法,實(shí)現(xiàn)了在±10°的連續(xù)角度范圍內(nèi),系統(tǒng)誤差都能滿足精度要求。
2 系統(tǒng)設(shè)計(jì)和工作原理
測量系統(tǒng)主要由光機(jī)系統(tǒng)、電路系統(tǒng)組成,下面詳細(xì)描述了角度測量系統(tǒng)的原理和工程實(shí)現(xiàn)。
2.1 精密光機(jī)系統(tǒng)設(shè)計(jì)
如圖1所示,為系統(tǒng)的光路結(jié)構(gòu),光路系統(tǒng)主要由激光器、PSD、衰減片、濾光片以及外部的反射鏡(或自標(biāo)定鏡)組成。
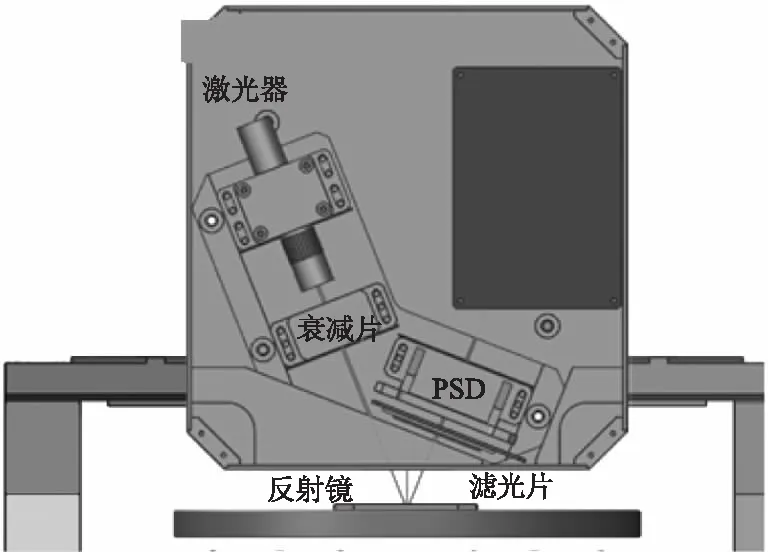
圖1 光路系統(tǒng)
激光器的穩(wěn)定性對系統(tǒng)的精度影響較大,應(yīng)選擇漂移小且光源穩(wěn)定的激光器,通過比較,選用美國Coherent公司的STR-655-1-CW-P-D01型激光器,其發(fā)出波段655 nm的紅光,功率為1 mW,其光束穩(wěn)定性小于10 μrad/℃,發(fā)散角小于3 mrad。實(shí)際測試中,為了避免雜光和振動造成的影響,需加上遮光外罩并在隔振平臺上測試。
PSD作為光電探測器件,主要用于精確的測量其上光斑的位置。PSD需要具有二維位移的檢測能力,光譜需與激光器適應(yīng),且為了保證±10°的大角度測量,其檢測面積需要符合要求。通過對比,選擇Sitek公司2L45_SU24型PSD,其為雙面型PSD,光敏面積45 mm×45 mm,溫度漂移為40 ppm/℃,線性度±0.3 %,響應(yīng)靈敏度為0.4 A/W。該P(yáng)SD是目前市場上靶面最大的高精度PSD,原則上,PSD需要對其非線性進(jìn)行校正,但選用的PSD非線性誤差較小,可不必進(jìn)行非線性校正。
激光器的輸出能量較大,不能直接照射到PSD探測器上,需要加入衰減片。衰減片選用Thorlabs公司型號NE510B的吸收型中性密度產(chǎn)品,其只會造成一定的散射,對光斑影響小。為了防止近紅外光線等對系統(tǒng)造成雜光干擾,需選用合適的濾光片,濾光片選擇吸收衰減型濾光片,通過比較分析,考慮選用655±10~20 nm窄帶濾光片。
經(jīng)過光路計(jì)算,反射鏡中心距PSD平面為45 mm,激光入射角為20°,可保證反射鏡±10°轉(zhuǎn)動,光斑都能在PSD的靶面上。激光器、濾光片、衰減片和PSD安裝在一塊高精度的平板上,采用固定銷的方式保證安裝精度。衰減片貼出光口安裝,濾光片安裝于PSD前,結(jié)構(gòu)設(shè)計(jì)緊貼,不易受雜光的影響。激光器、PSD采用定制加工的夾具,保證平面度、粗糙度以及孔的尺寸公差。
圖2為測試系統(tǒng)的工裝圖,其中,測量工裝主要用于安裝和測試反射鏡,為了便于系統(tǒng)的標(biāo)定,其可以更換為包含六自由度位移臺的標(biāo)定工裝。標(biāo)定工裝的反射鏡安裝位置必須與測量工裝一致,且需要通過設(shè)置位移臺的參數(shù),保證位移臺帶動反射鏡的運(yùn)動能準(zhǔn)確反映測量工裝中反射鏡的運(yùn)動,最終經(jīng)過標(biāo)定后的系統(tǒng)能準(zhǔn)確應(yīng)用于實(shí)際的測量工裝中。
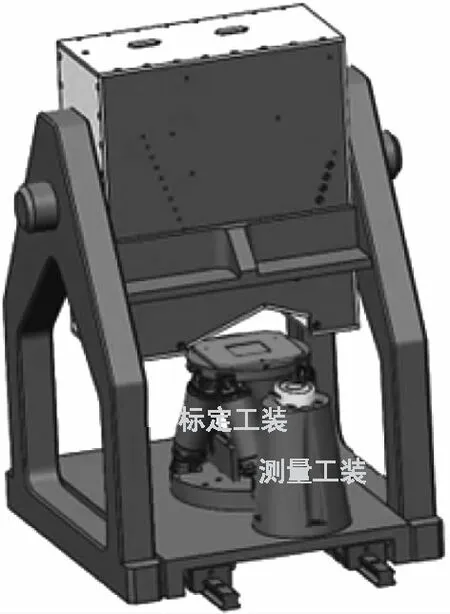
圖2 工裝圖
為了保證標(biāo)定的精度,需要采用高精度的六自由度位移臺。選擇PI公司的H-811.I2六自由度平臺。其在二維旋轉(zhuǎn)角度的范圍和精度如表1所示,二維轉(zhuǎn)角均可達(dá)到±10°,最小位移和重復(fù)精度均在μrad 數(shù)量級,可以滿足標(biāo)定的范圍和精度需求。
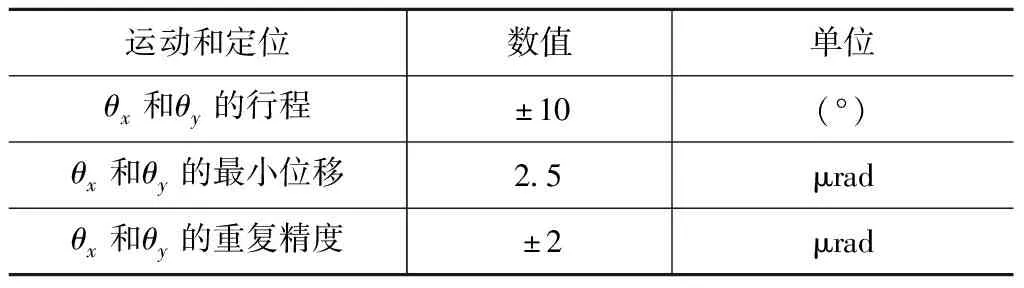
表1 位移臺參數(shù)
2.2 高帶寬電路系統(tǒng)設(shè)計(jì)
電路系統(tǒng)主要包括PSD信號處理子系統(tǒng)、數(shù)據(jù)傳輸子系統(tǒng)和數(shù)據(jù)處理子系統(tǒng),電路原理如圖3所示。
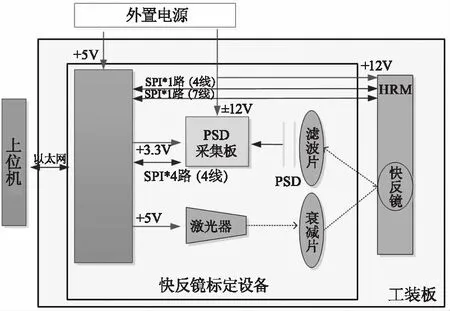
圖3 電路原理
PSD信號處理子系統(tǒng)主要包含PSD器件、調(diào)理芯片及AD采集電路。數(shù)據(jù)傳輸子系統(tǒng)主要包含F(xiàn)PGA數(shù)據(jù)傳輸板,其與PSD的AD采集電路連接,可以實(shí)現(xiàn)AD的采集和發(fā)送控制,通過以太網(wǎng)與上位機(jī)連接,可以實(shí)現(xiàn)高速數(shù)據(jù)傳輸功能,同時FPGA還和反射鏡進(jìn)行電源和數(shù)據(jù)連接,可以采集反射鏡自身的外部電壓值,將電壓值和反射鏡角度值對應(yīng)存儲,一起傳輸給上位機(jī)。數(shù)據(jù)處理子系統(tǒng)包含上位機(jī)的數(shù)據(jù)采集、濾波、二維角度計(jì)算、系統(tǒng)標(biāo)定等功能。
為了滿足高速采樣的需要,AD采集板選用美國TI公司的ADS1258IRTCR型器件,24 Bit字長,采樣速率可達(dá)到125 ksps。主控芯片使用Xilinx公司的Zynq7000系列的芯片,型號為XC7Z020-2CLG400I,400個引腳的FBGA封裝,芯片的處理器系統(tǒng)集成了兩個ARM CortexTM-A9處理器,實(shí)現(xiàn)高速的數(shù)據(jù)處理。
3 二維角度解算和精密標(biāo)定方法
如圖4所示,為系統(tǒng)采集到的PSD四路數(shù)字電壓信號通過一系列計(jì)算得到精密的二維角度值的流程圖。

圖4 精密角度計(jì)算流程
選擇PSD靶面的中心作為坐標(biāo)原點(diǎn),四路數(shù)字電壓信號為Vx1、Vx2、Vy1、Vy2,Lx、Ly為兩個方向光敏面的長度,入射到PSD上的光斑二維位移為:
(1)
根據(jù)系統(tǒng)的光路建立相應(yīng)的數(shù)學(xué)模型,得到光斑二維位移與反射鏡的二維旋轉(zhuǎn)角度的函數(shù)關(guān)系。此時得到的角度值誤差往往偏大,需要對其濾波和校正,以降低其隨機(jī)誤差和系統(tǒng)誤差,最終得到精確的角度測量值。
3.1 二維位移與角度關(guān)系求解
如圖5所示,為系統(tǒng)的光路模型簡圖,世界坐標(biāo)系設(shè)置于平面鏡中心。反射鏡處于零位時,光線以20°入射角照射到反射鏡的中心位置,經(jīng)反射后垂直打在PSD靶面上。

圖5 光路示意圖
由于在實(shí)際測試中,反射鏡的兩個旋轉(zhuǎn)軸并不通過反射鏡的中心,而是存在一定的偏移dx和dy,計(jì)算出的角度與位移關(guān)系是二維非線性耦合的關(guān)系,即θx=f(X,Y),θy=g(X,Y),求解相應(yīng)的函數(shù)解析解較困難,本文將根據(jù)實(shí)際的光路參數(shù)得到相應(yīng)的數(shù)值解,并通過擬合的方法得到f和g的近似解。

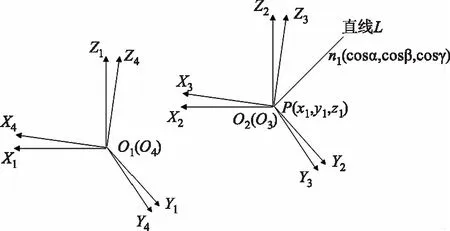
圖6 坐標(biāo)系變換
那么坐標(biāo)系O1-X1Y1Z1到坐標(biāo)系O4-X4Y4Z4的變換矩陣可表示為:
(2)
其中,T3×3為坐標(biāo)系繞經(jīng)過其原點(diǎn)的直線旋轉(zhuǎn)θ角的變換矩陣:
(3)

根據(jù)式(2)和(3)可求得反射鏡繞橫軸和縱軸旋轉(zhuǎn)θx和θy后的平面方程:
(4)
利用以下兩個約束條件可求解反射光線并得到PSD上的二維位移:
①入射角等于反射角;
②入射光線方向向量、反射鏡法向量、反射光線方向向量共面。
如圖 7(a)所示,為一系列(θx,θy)構(gòu)成的面點(diǎn)陣,計(jì)算得到相應(yīng)光斑位移的數(shù)值解(X,Y)構(gòu)成的點(diǎn)陣如圖7(b)所示。

圖7 位移和角度關(guān)系
采用二次多項(xiàng)式擬合的方法,利用得到的一系列對應(yīng)的數(shù)值解,擬合θx=f(X,Y),θy=g(X,Y),最終得到以下關(guān)系:
只要計(jì)算出PSD輸出的二維坐標(biāo),根據(jù)上面的關(guān)系式即可得到反射鏡的二維轉(zhuǎn)角。
3.2 二維角度全局標(biāo)定方法
由光斑位移計(jì)算出的角度值受光學(xué)和機(jī)械安裝等因素的影響,存在一定的誤差,需進(jìn)行角度標(biāo)定。標(biāo)定是得到一組實(shí)際測量的角度與理論角度之間的對應(yīng),對實(shí)際測量的角度值進(jìn)行校正,使測量值經(jīng)過校正后得到的估計(jì)值與理論值接近,以降低系統(tǒng)誤差。
標(biāo)定設(shè)備為六自由度精密位移臺,以位移臺角度作為理論角度值,測量系統(tǒng)輸出的角度值作為測量值,標(biāo)定時位移臺的移動方式如圖8所示,采用“弓”型掃描的方式直至遍歷所有的需標(biāo)定角度值,位移臺掃描前,需設(shè)置位移臺的位置參數(shù)和兩個轉(zhuǎn)軸的參數(shù),保證其與測量工裝的反射鏡參數(shù)一致性。位移臺處于每一角度位置時都需采集一定量的測量角度數(shù)據(jù),將采集的角度數(shù)據(jù)求平均值作為該位置的角度測量值。

圖8 位移臺移動過程
角度校正算法可采用數(shù)值擬合、插值以及神經(jīng)網(wǎng)絡(luò)等方法[14]。由于PSD、光源等非線性因素的影響,采用擬合的方法系統(tǒng)誤差較大,且非線性擬合關(guān)系難以確定,神經(jīng)網(wǎng)絡(luò)的方法可以解決非線性的問題,但模型相對復(fù)雜,容易造成過擬合,插值的方法利用了被插值點(diǎn)與其臨近點(diǎn)相關(guān)性較大的原理,插值后的結(jié)果的系統(tǒng)誤差較小,且模型相對簡單,本文采用的方法為線性插值的方法。
如圖9所示,對處于四邊形ABCD中的二維點(diǎn)X進(jìn)行插值操作,X的測量值(x,y)滿足以下關(guān)系:
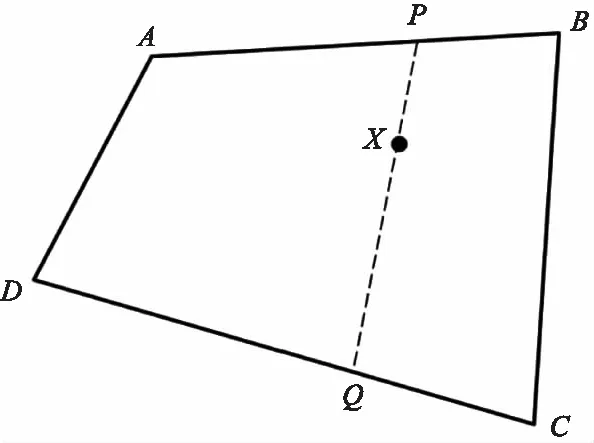
圖9 四邊形插值
x=xA+(xB-xA)·u+(xD-xA)·v+(xA-xB+xc-xD))·u·v
y=yA+(yB-yA)·u+(yD-yA)·v+(yA-yB+yc-yD))·u·v
其中,xA~xD,yA~yD均為相應(yīng)點(diǎn)的測量值,u和v為待求插值系數(shù)。由以上兩個方程可解出u和v(選擇[0,1]區(qū)間的解),X點(diǎn)的插值估計(jì)為:
X=XA+(XB-XA)·u+(XD-XA)·v+(XA-XB+Xc-XD))·u·v
Y=YA+(YB-YA)·u+(YD-YA)·v+(YA-YB+Yc-YD))·u·v
其中,XA~XD,YA~YD均為相應(yīng)點(diǎn)的理論值,將計(jì)算得到的u和v帶入上式即可求出點(diǎn)X的兩個二維插值估計(jì)。
4 實(shí)驗(yàn)測試和分析
本文所設(shè)計(jì)的基于PSD的二維動態(tài)角度高精密測量系統(tǒng)的整體結(jié)構(gòu)如圖10所示。整個設(shè)備呈垂直放置,反射鏡放置在精密的位移臺上,可進(jìn)行標(biāo)定測試,激光器、PSD、FPGA采集板以及AD轉(zhuǎn)換芯片集成于黑箱內(nèi)。采集到的數(shù)據(jù)在上位機(jī)用戶界面上顯示,軟件同時集成標(biāo)定功能,下面將對系統(tǒng)的指標(biāo)進(jìn)行實(shí)驗(yàn)測試。
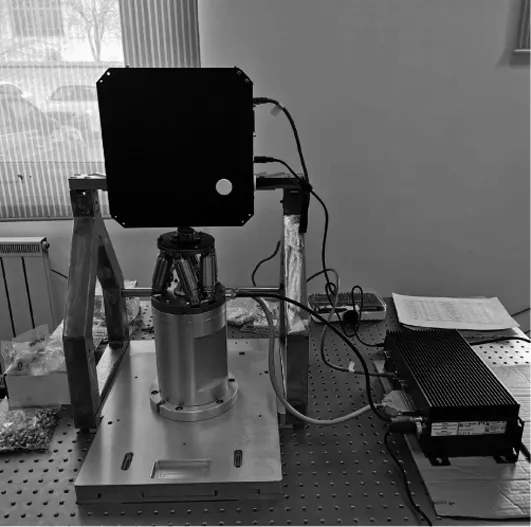
圖10 測量系統(tǒng)實(shí)物圖
4.1 靜態(tài)測試實(shí)驗(yàn)
靜態(tài)測試時,設(shè)備上電,反射鏡轉(zhuǎn)動到某一位置后保持靜止?fàn)顟B(tài),激光器和PSD等器件經(jīng)安裝后位置固定,記錄一段時間后系統(tǒng)測量的角度值(經(jīng)過數(shù)字濾波后)的漂移,其對應(yīng)散點(diǎn)如圖11所示,表2為對應(yīng)的角度漂移。
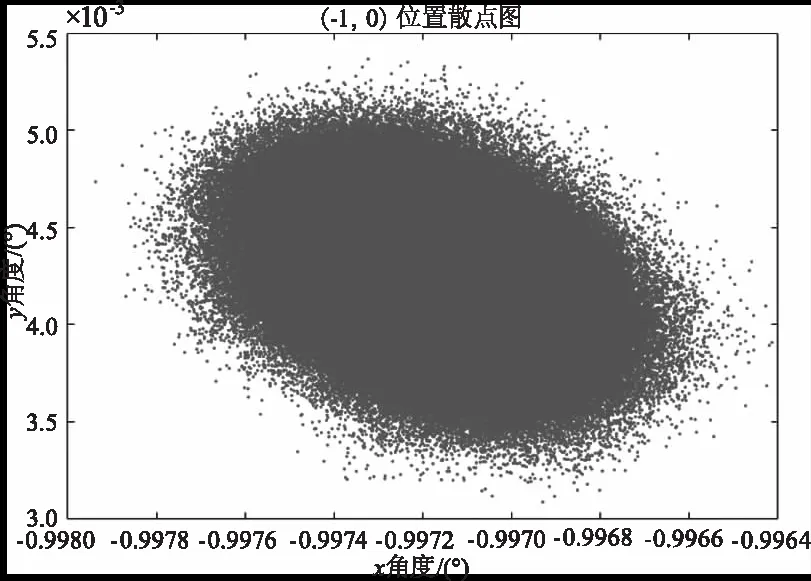
圖11 散點(diǎn)圖

表2 角度漂移
由表2可以看出,X和Y兩個方向的波動范圍均在±0.001°以內(nèi),可以達(dá)到精度指標(biāo)。反射鏡放置于六自由度位移臺上,控制位移臺帶動反射鏡移動到不同的(U,V)角度位置,在相應(yīng)的位置分別進(jìn)行靜態(tài)測量,得到X和Y方向的角度波動如表3所示。
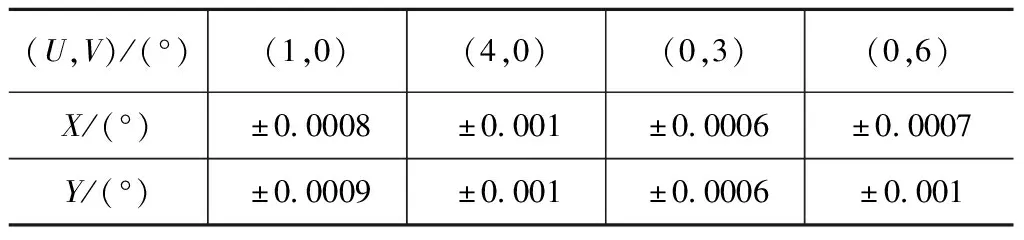
表3 不同位置的角度波動
由表3可以看出,在測試的幾個不同角度位置,角度的漂移均在±0.001°以內(nèi),滿足相應(yīng)的精度指標(biāo)。并且,在大角度位置(0,6),其角度漂移并未呈現(xiàn)明顯的增加趨勢,表明測量系統(tǒng)在大的角度范圍內(nèi)也可以保證較高的精度。
4.2 動態(tài)測試實(shí)驗(yàn)
動態(tài)測試時,反射鏡兩個轉(zhuǎn)軸以一定的頻率轉(zhuǎn)動,X軸頻率設(shè)置為320 Hz,Y軸頻率設(shè)置為10 Hz,采樣頻率為125 kHz,記錄并保存一段時間內(nèi)系統(tǒng)計(jì)算出的二維角度數(shù)據(jù),經(jīng)軟件繪制出二維角度的時域曲線如圖12所示。
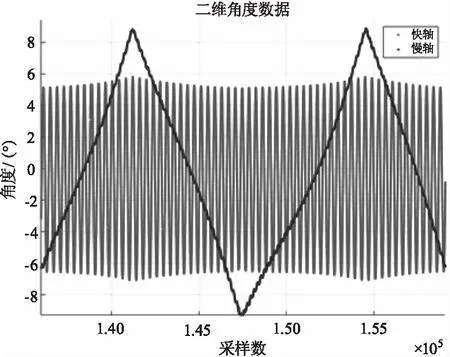
圖12 時域圖
從圖12中可以看出,快軸每個周期采樣約390個點(diǎn),慢軸每個周期采樣約12500個點(diǎn),間接表明系統(tǒng)的采樣速率達(dá)到了125 kHz的水平。
以快軸為例,采用500 Hz帶寬的數(shù)字低通濾波器(切比雪夫?yàn)V波器)對角度數(shù)據(jù)濾波,盡量保證低頻信號部分的頻譜不衰減,如圖13所示為濾波前后信號的頻譜,從圖中可以看出,低頻信號段基本無衰減。
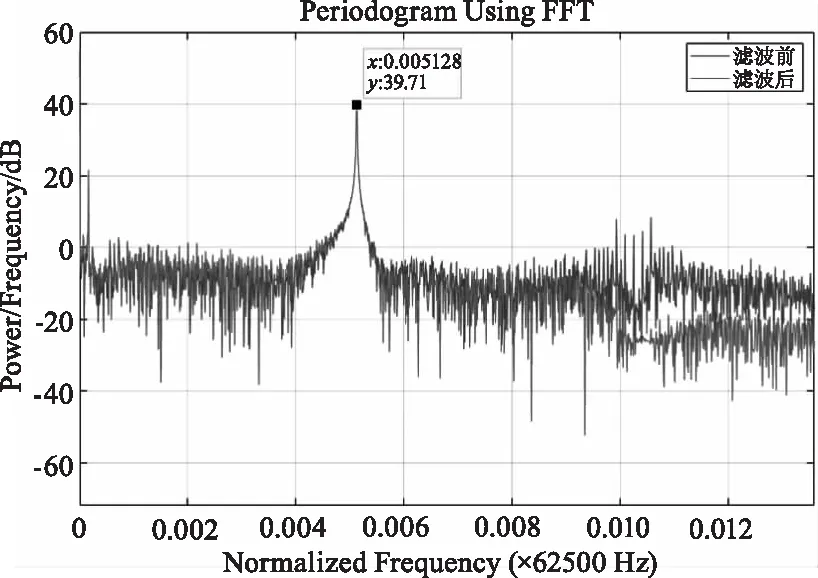
圖13 頻域圖
濾波前后某一周期內(nèi)的時域曲線如圖14所示,經(jīng)過數(shù)字濾波后,正弦曲線趨于平滑,角度的隨機(jī)誤差減小,信號的幅值無明顯衰減,信號產(chǎn)生約25個采樣點(diǎn)的相位延遲,需在后期進(jìn)行數(shù)據(jù)處理。

圖14 相位延遲
4.3 線性度實(shí)驗(yàn)
反射鏡置于在精密位移臺上,保持Y軸靜止不動,X軸每次以0.5°的步長轉(zhuǎn)動,保存轉(zhuǎn)動到每一位置的系統(tǒng)測量值(未標(biāo)定)和位移臺的精確角度值,采集29組對應(yīng)數(shù)據(jù),得到的曲線如圖15所示,計(jì)算得到其非線性誤差為0.165 %。

圖15 X軸非線性度
同理,保持X軸靜止不動,Y軸每次以0.5°的步長轉(zhuǎn)動,保存相應(yīng)的測量值和位移臺的角度值,采集29組對應(yīng)數(shù)據(jù),得到的曲線如圖16所示,計(jì)算得到其非線性誤差為0.404 %。X和Y兩個軸的非線性誤差都在較小的量級,且X方向的線性度較Y方向好。

圖16 Y軸非線性度
4.4 標(biāo)定實(shí)驗(yàn)
下面對比了采用多項(xiàng)式擬合的方法和線性插值兩種方法的標(biāo)定結(jié)果。
4.4.1 多項(xiàng)式擬合方法
采用三次多項(xiàng)式擬合對測量值進(jìn)行校正。通過最小二乘法估計(jì)求出擬合參數(shù)即可。
如表4所示,為經(jīng)過校正后的誤差結(jié)果,X和Y兩個方向標(biāo)定后的最大誤差均達(dá)到0.02°,無法滿足精度要求。
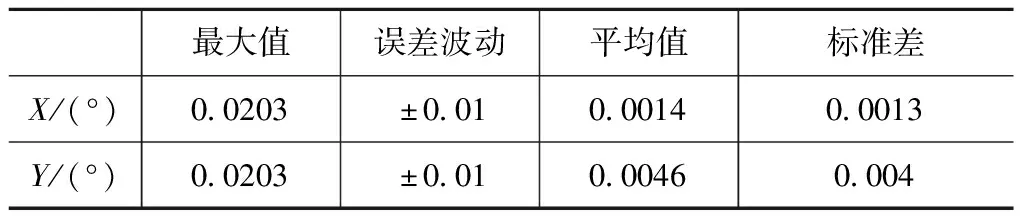
表4 標(biāo)定誤差
4.4.2 插值方法
插值法與擬合法的主要區(qū)別在于擬合法考慮的是整體的數(shù)據(jù)特性,而插值法考慮局部數(shù)據(jù)的相關(guān)性。如圖17(a)所示,校正前測量角度值與理論的角度值存在較大的偏差,如圖17(b)所示,經(jīng)過插值校正后,插值估計(jì)值均與理論值近似重合。
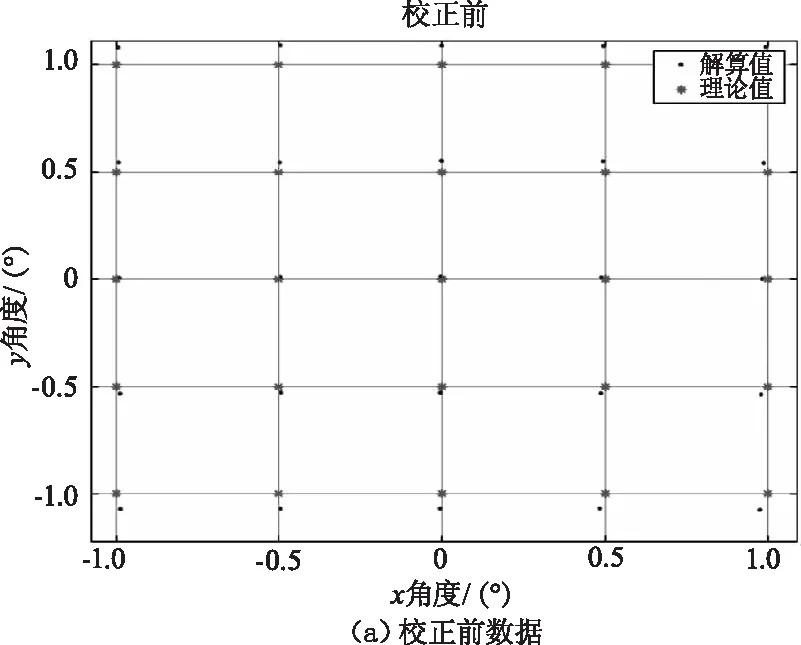
圖17 標(biāo)定結(jié)果
如圖18所示,為經(jīng)過校正后的誤差分布結(jié)果,其中顏色深淺表征相應(yīng)位置誤差的大小,經(jīng)過校正后,X軸最大誤差約0.007°,平均誤差約0.0009°,Y軸最大誤差0.0065°,平均誤差0.0017°,平均誤差滿足0.001°精度指標(biāo)。
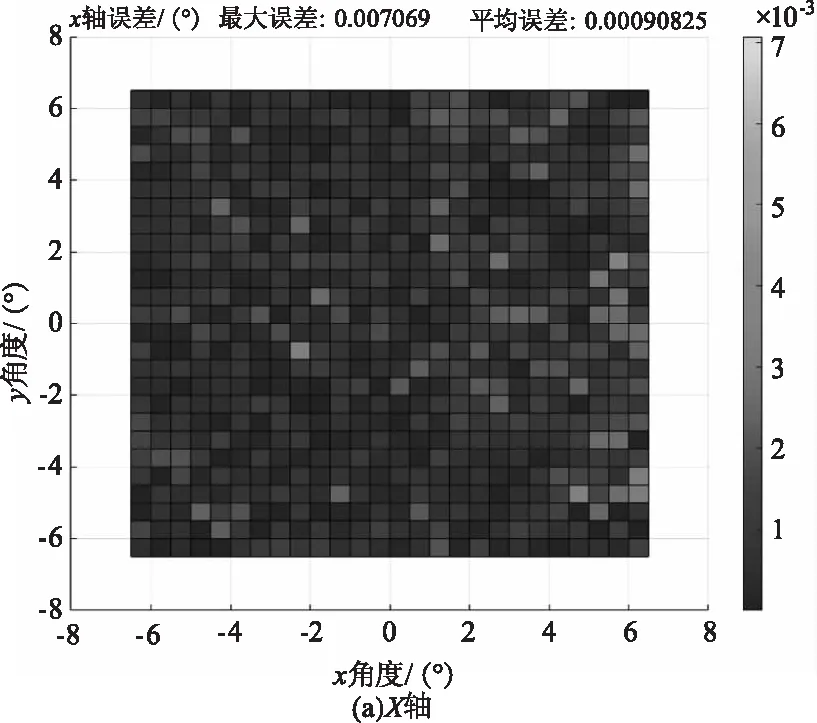
圖18 誤差分布圖
5 結(jié) 論
設(shè)計(jì)了一臺可以進(jìn)行非接觸式的二維動態(tài)角度精密測量的設(shè)備。設(shè)備采用二維PSD和高速數(shù)據(jù)采集系統(tǒng)的方案可以精確的給出二維反射鏡的兩個角度值,并采用插值的方式對系統(tǒng)進(jìn)行標(biāo)定,實(shí)現(xiàn)高精度測量。系統(tǒng)達(dá)到±10°的范圍,隨機(jī)噪聲0.001°,系統(tǒng)誤差標(biāo)定后最大0.007°,同時采樣速度達(dá)到125 kHz的水平,具有300 Hz以上的響應(yīng)帶寬,處于行業(yè)較高水平。該高精度動態(tài)角度測量設(shè)備可以用于高速二維振鏡的測試,還可以推廣到航天、交通、工業(yè)、精密儀器等應(yīng)用中。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
