基于無人機實景建模的機場道路路基平整度檢測與分析研究
2021-07-29 07:20:28劉穎張勇盧吉,周誠
土木建筑工程信息技術 2021年3期
劉 穎 張 勇 盧 吉, 周 誠
(1.華中科技大學 土木與水利工程學院,武漢 430074; 2.武漢市市政建設集團有限公司,武漢 430056)
引言
路基平整度是指在道路施工過程中,路基面縱向的凹凸量的偏差值,是控制路面平整度的一種重要手段,也是保證施工穩定性和安全性的重要措施。路基平整度關系到道路路基層施工的準確性以及路基層壓實性能,對道路整體驗收質量有重要影響[1]。此外,機場路基平整性關系到飛機起飛降落的安全、平穩舒適以及路面所能承受沖擊力的大小和使用壽命,因此,為確保飛機起飛降落安全,機場道路需要對路面平整度進行控制,確保平整度符合施工技術標準和要求[2]。
近年來,三維激光掃描技術應用于平整度檢測引起了相關學者的關注,趙玉臣等利用激光點云數據檢測墻面平整度[3]; 李偉等利用地面三維激光掃描技術進行道路平整度的研究[4]; 高仁強等利用機載激光雷達對新疆某一道路建立三維地形表面模型,進行平整度可視化表達[5]。目前,路面平整度的檢測方法仍然是利用3m直尺或者車載激光平整度檢測儀,三米直尺檢測的原理是每200m測試兩處,每處連續10尺,利用三米直尺進行最大間隙的檢測和計算[6]; 車載激光平整度檢測是利用激光位移傳感器檢測四分之一車輪沿某一車道的路面高程變化[7],目前的檢測方法僅僅利用選取的個別點或者個別車道線的平整度反映整條道路的平整性,使得平整度檢測存在片面性。
綜上所述,目前缺乏一種針對道路全場、全過程的平整度檢測的方法,因此本文提出了利用無人機掃描道路,通過實景建模得到道路的三維實景模型,在此基礎上可得到道路的三維高程曲面圖并進行任意車道和路線的國際平整度指數(IRI)計算,從而進行路基平整度檢測。為證明該方法的可行性,依托武漢某機場項目的滑行道進行路基平整度檢測實驗。
1 機場路基平整度檢測方案
1.1 工程概況
為了驗證無人機實景建模進行平整度檢測方法的可行性,選取武漢某機場飛行區擴建項目滑行道作為實驗場地,利用車載激光平整度檢測儀和無人機實景建模兩種檢測方法,進行平整度的檢測。該機場位于武漢市漢南區,位于長江左岸的一級階地,場地地形較為平坦,地面標高為22.88~23.86m,總施工面積達到200萬m2,該項目按照結構形式分為停機坪、垂直聯絡道、滑行道以及跑道等(圖1)。

圖1 某機場滑行道施工現場實景圖
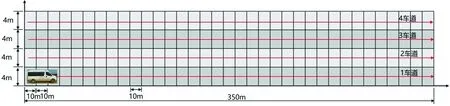
圖2 車載激光平整度實驗布置方案
1.2 實驗段檢測方法
本機場擴建項目主要分為跑道和滑行道,其中滑行道寬度為18m,兩側道肩分別寬3.5m,總寬25m,本實驗選取寬為18m,長度為350m,總實驗面積為6 300m2的滑行道路基進行平整度檢測。
本次實驗選取的滑行道處于第一層水穩,已經完成水穩攤鋪和壓實并且無養護布遮蓋,路基面沒有因降塵灑水而導致路面潮濕,保證了激光檢測以及無人機掃描的清晰性。首先利用車載激光平整度檢測儀進行檢測,其次再進行無人機掃描實景建模,并保證兩種實驗方法下的實驗條件相同。
(1)車載激光平整度檢測方法
車載激光平整度檢測儀進行路基面平整度檢測的原理是利用激光位移傳感器測量路面高程,獲得路面與其沿線物的三維信息,最終得到國際平整度指標,單位為m/km。車載激光平整度檢測的具體方法如下:在16m*350m的實驗場地上,根據13路激光檢測設備和檢測車輛型號以及實驗段的路基寬度,在豎直方向上平均劃分為0~4m、4~8m、8~12m、12~16m的4條車道,并在檢測車上安裝激光檢測儀; 檢測車按照30~60km/h的設計時速,從實驗起點行駛至實驗終點,并以10m為采樣間隔進行4條實驗車道平整度的檢測。
(2)無人機實景建模平整度檢測方法
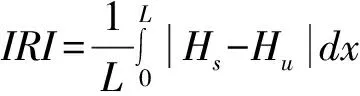

圖3 無人機檢測平整度流程圖
2 實驗結果
2.1 車載激光平整度檢測結果
車載激光平整度檢測實驗中,共4條車道,每條車道分為左右兩條車轍,得到平整度檢測數據。由于車輛在行駛過程中會出現偏離預定車道或者間斷測量等情況,使得獲取的激光點云數據不能完全真實地反映被掃描路基面的表面信息,對于一些干擾噪聲點需要對獲取的激光點云進行濾波處理,剔除極端點之后的車載激光平整度檢測儀得到的國際平整度檢測值能夠較為真實的反應被測車道的路基面平整度。根據以上所述,經過數據預處理得到的車載激光平整度檢測結果示意圖如圖4所示。

圖4 車載激光平整度檢測結果
根據車載激光平整度檢測儀的檢測數據可知,2車道在130~150m和220~250m的平整度有較大起伏變化,除此之外,實驗路段的國際平整度指數均在0.5~2.0之間,波動起伏不大,實驗路段路基面整體較為平整。根據車載激光平整度檢測儀得到的檢測數據,并依據《公路路基路面現場測試規程》(JTG 3450—2019)和《公路工程質量檢驗評定標準》(JTG F80/1—2017)進行數據處理,進行路基面平整度檢測指標分析,具體見表1。

表1 車載激光平整度指標分析
分析結果表明每車道的國際平整度指數的平均值在1.000~1.400范圍內,標準差在0.300~0.500之內,IRI合格段數均為35,IRI合格率為95%~99%,因此路基面平整度良好,滿足了機場路基面的平整度質量檢驗的要求。
2.2 無人機實景建模平整度檢測實驗結果
根據無人機掃描得到的照片,劃分空中三角形,并按照精度要求確定60%~90%的采樣率并進行實景建模,得到實驗路基面的三維實景模型,具體見圖5。
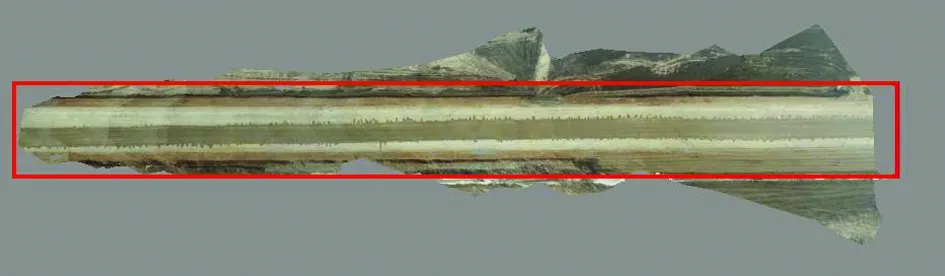
圖5 三維實景模型
在三維實景模型中,首先根據標記點確定車載實驗對應車道的車轍線,在車轍線上選取樣本點,設置樣本點的間隔為5cm,獲取各樣本點的高程信息,形成高程散點圖,相對大多無人機攝影而言,本次實驗的無人機航行高度僅為10m,對于樣本點的高程精度可以達到0.0001m即0.1mm。以1車道右側車轍的高程數據為例,形成高程散點圖,如圖6。
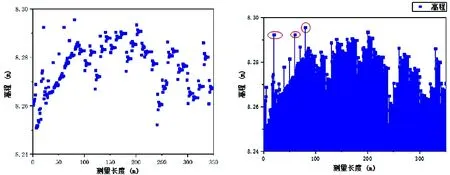
圖6 1車道右側高程散點圖

圖7 無人機實景建模檢測結果
以10m為采樣間隔進行無人機實景建模檢測,得到以上的平整度檢測結果。根據圖7無人機實景建模進行平整度檢測的結果的可知,4條車道整體平整度較好,除1車道右側在0~30m的路段平整度變化較大之外,其他車道在0~150m路段的平整度較好,在150~350m的IRI檢測值起伏較大,路基面存在凹凸不平。根據無人機檢測結果,依據《公路路基路面現場測試規程》(JTG 3450—2019)和《公路工程質量檢驗評定標準》(JTG F80/1—2017)進行數據處理,進行路基面平整度檢測指標分析,具體見表2。
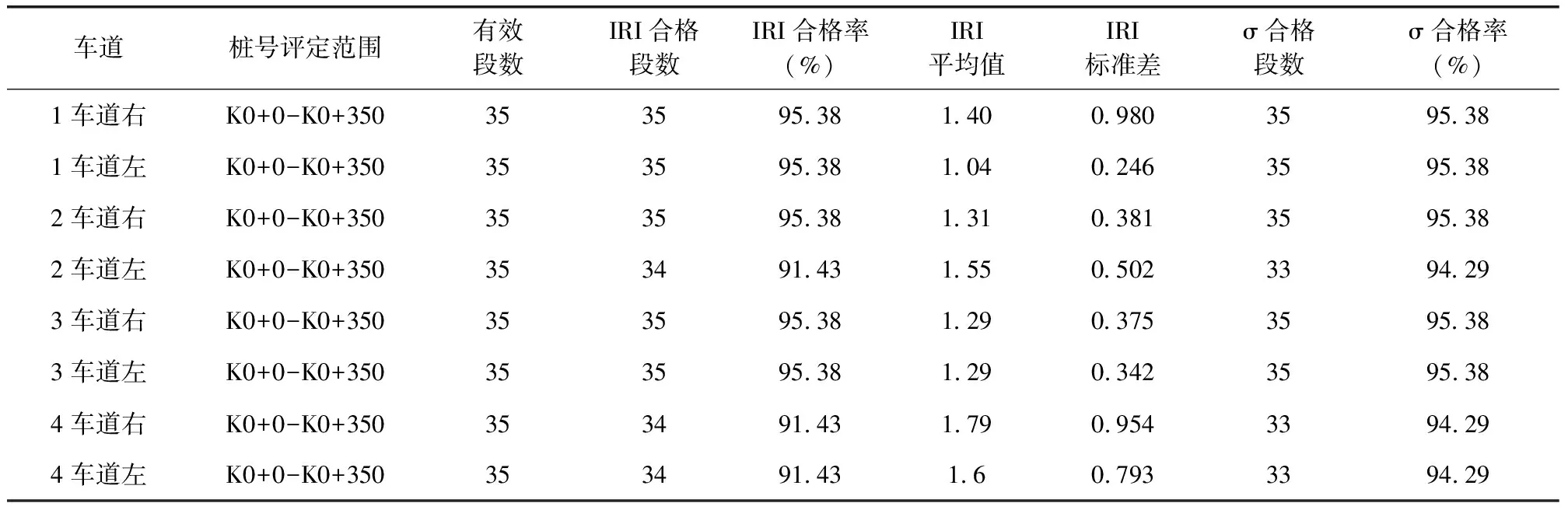
表2 無人機檢測平整度結果分析
3 車載激光平整度檢測與無人機實景建模檢測結果比對
3.1 結果比對
車載激光檢測和無人機實景建模兩種實驗得到的平整度檢測結果如圖8所示,根據圖8觀察可知,在0~30m的1車道右側以及150~300m的4車道左右兩側檢測結果存在較大的差別。觀察三維實景模型中對應車道的部分,究其原因1車道右側部分地面存在水漬,路面較為潮濕,無人機掃描時可能存在水面反光、照片不清晰等誤差; 4車道為施工車輛行駛車道,在無人機掃描過程中有施工車輛來回運輸,使得照片存在陰影以及重疊率降低并對建模精度可能有一定影響; 以上所述可能為誤差存在的主要原因。因此首先手動排查照片存在的問題,除去部分不清晰以及誤差較大的照片,在誤差允許的范圍內進行補拍,利用無人機實景建模的檢測結果與車載激光檢測的方法實驗結果是相似的,可以通過無人機實景建模的方法反映路面的
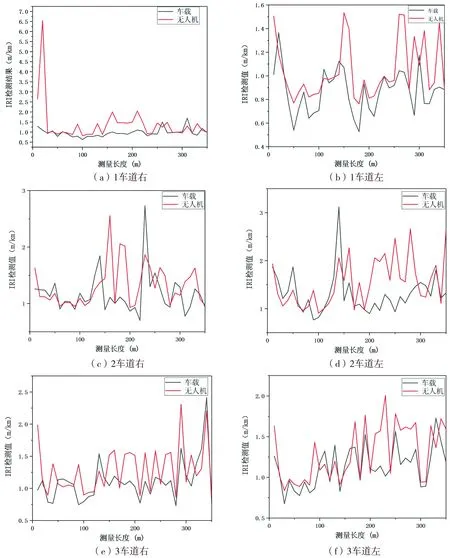
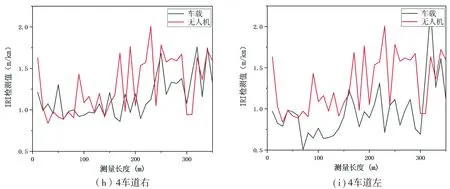
圖8 車載激光檢測與無人機實景建模檢測結果示意圖
平整度,并且該方法在一定程度上可以替代車載激光平整度檢測的方法。
3.2 無人機全路段的平整度檢測
相比于車載激光平整度檢測的方法,利用無人機建模的一大優勢是可以得到道路全場區的任意樣本點高程數據,并形成三維空間的全路段相對高程曲面圖,達到道路全場景平整度檢測的目的,不再限制于檢測車只能檢測車轍所在直線的平整度,如圖9所示。

圖9 全路段相對高程曲面圖
全路段相對高程曲面圖是在準確獲取任意點實際高程的基礎上,找到檢測路段的最小高程,能夠準確形象地反映出被檢測道路的起伏變化,該機場滑行道的相對高程在0.05m范圍內,并且本實例的測量精確度可以達到毫米級。根據無人機實景建模的結果得到全路段高程曲面圖,并根據檢測路段的要求設置樣本點間隔,進而根據國際平整度指數的計算公式得到任意縱截面的IRI檢測值,實現全路段任意截面的平整度檢測。
4 結論
本文以武漢市漢南機場滑行道路基面為例,對平整度檢測進行了相關研究,通過車載激光平整度檢測儀與無人機實景建模兩種平整度檢測方法的檢測結果對比分析結果如下:
(1)證明了利用無人機實景建模并進行IRI指標計算,是可以進行道路平整度檢測的,并且該方法的檢測結果對于現有檢測結果而言具有一定的可參考性;
(2)此外,根據地面分辨率反算航拍高度并利用無人機實景建模的方法能夠獲取全路面的高程信息,在本實例中精確度可達到0.1mm,在保障精度的同時實現全路段的平整度檢驗,克服了現階段平整度檢測片面性和偶然性的缺點。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55