建構筑物空間標識位置編碼技術研究
2021-07-29 07:20:38曹吉昌濮國梁顏寒祺
土木建筑工程信息技術 2021年3期
曹吉昌 濮國梁 顏寒祺 黃 港
(1.住房和城鄉建設部科技與產業化發展中心,北京 100835; 2.北京大學,北京 100871)
引言
建筑物及其構件的信息種類繁多,從建筑設計到后期維護階段,信息的增刪和變更時常發生,這為建筑物及其構件的信息化管理帶來了挑戰。
在建筑物的設計階段,建筑物的數字化信息模型為建筑物內部構件賦予唯一的標識編碼,以便在建筑物全生命周期中,基于該標識碼交換和管理建筑業中多源數據。近年來,國家相關基礎建設部門推出一系列用于建構筑物構件的分類信息編碼,但不夠關注部件空間位置屬性。若以空間位置唯一標識作為整合線索,可實現建筑物部件基于空間位置的關聯。
由于建筑物空間位置標識信息在檔案管理、智能建造和后期巡檢中很重要[4],本文提出一套建構筑物位置編碼應對相關行業的應用需求。這套建構筑物的空間位置劃分和編碼系統繼承北斗全球位置框架,滿足以下三個主要需求:
(1)唯一性需求。每個建構筑物具有全球唯一標識,能夠與對應的實體建立一一對應的關系。若不滿足唯一性,不同部門對同一建構筑物指定不同的標識編碼,在數據整合交換中出現偏差和誤解,不能通過該標識碼融合該對象多源屬性。
(2)一致性需求。建筑物外部環境與建筑內部空間劃分共用一套劃分框架和編碼方法,便于劃分框架的拓展和空間運算分析; 不同建構筑物的空間標識在一套空間標識命名框架下,組織和管理所有建構筑物數據。
(3)高效性需求。建筑物中存在海量的構件信息,需要通過構件的標識進行數據關聯和檢索。而構件在建筑物中有預設的唯一空間位置,且實際應用中存在許多以空間位置為線索的數據共享和數據檢索的場景。要實現這些場景中的應用,需要構件實體被賦予的空間標識編碼能夠支持高效準確的拓撲分析和距離計算等。
1 國內外研究和其局限性
1.1 國內外研究現狀
(1)建筑物編碼體系
2006年,國際標準化組織制定了ISO/IDS 框架,用于建立各國建筑業分類信息標準,定義各種建筑信息分類體系的基本概念,梳理它們的關系。美國建筑標準學會CSI和加拿大建筑標準學會CSC頒布了Omniclass分類系統,能呈現最直觀簡潔的編碼體系,與BIM數據存儲標準IFC對接,支持BIM技術的實現[13,17]。2018年,中華人民共和國住房和城鄉建設部頒發適用于民用和通用建筑廠房的《建筑信息模型分類和編碼標準GB/T51269-2017》[1]。
目前建筑行業中使用的構件編碼主要考慮構件的類別,幾何特征,生產信息等,如圖1[2]。同一批從工廠中生產出的某一特定構件/零件,會被賦予完全相同的生產編碼,分散在不同地區和空間位置的構件共用一個生產編碼,使目前的構件編碼不能夠保證全局唯一性。

圖1 中建(天津)工業化建筑工程有限公司編碼
(2)構件查詢方法
建筑物構件的復雜性和語義的多樣性,使用戶難以通過關鍵字查詢檢索到預期結果,查準率低。IFC的數據模型能映射到關系數據庫中,轉化成XML或者是RDF表達。研究者致力于提出各種QL框架,如SPARQL[7], XQuery[8],QL4BIM[9]。北京建筑大學盧錦[18]指出,當前研究對BIM模型中建筑信息的檢索起到推動作用。簡化構件為質點,在計算時排序構件與用戶參考點的通路,用Dijkstra算法得到最短距離,由空間關系和距離得到有序的構件集合。
1.2 局限性分析
在建構筑物空間標識與應用中,現有的研究仍存在四個問題[19]:建筑物內部的構件空間位置表示是建立在局部參考坐標下; 構件的位置依賴于多個參考系,不滿足空間標識唯一性和一致性; 現有的建構筑物編碼屬分類信息碼,只考慮簡單的建筑對象信息,不能直接含有建筑物中相對位置的關系; 現有構件的信息檢索方法不能直接再將空間屬性置于索引列,并在索引列的內容上進行計算和篩選操作,效率較低,不滿足空間標識的高效性。
2 北斗三維網格位置編碼概述
北斗網格位置編碼規定了北斗網格位置碼的網格選擇和編碼規則[6],應用廣泛。其符合以下基本編碼原則:1)唯一性; 2)嵌套性; 3)兼容性; 4)計算性; 5)實用性。
2.1 網格劃分
北斗三維網格位置碼由地球表面二維網格剖分+高度域網格剖分組成。
地球表面二維網格剖分中,網格劃分原點在赤道面與本初子午面的交點處,二維網格劃分為十級,方法如下。
(1)第一級網格。根據GB/T 13989-2012中1: 100萬圖幅進行劃分,單元大小是6°×4°;
(2)第二級網格。將第一級6°×4°網格,按照經緯度等分,分成12×8個第二級網格,對應于30′×30′網格,約為地球赤道處55.66km×55.66km網格;
(3)第三級網格。將第二級網格,按照經緯度等分,分成2×3個第三級網格,對應于1: 5萬地圖圖幅15′×10′網格,約為地球赤道處27.83km×18.55km網格;
余下層以此類推[20]。
高度域剖分中,任意剖分級數m,高度域剖分成2m層,地下為2m-1層,地上為2m-1層。同級網格相同層高度相等,高度與該層對應等高面赤道處相應級剖分形成的網格緯線方向長度匹配。同級網格高度與對應等高面赤道處網格緯線長度如圖2。北斗三維網格位置碼高度域劃分,將地球表面4°、30′、15′、……、1/2048″十個基本網格作為北斗三維網格位置碼定義大地高的中的θ,形成高度域網格劃分:
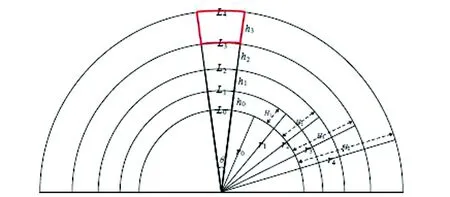
圖2 高度域方向不等距離劃分方法(赤道面)
(1)初始網格。地上、地下劃分成兩個部分;
(2)第一級網格。采用和赤道4o長度一致的劃分,每個劃分約445.28km;
(3)第二級網格。采用和赤道30′長度一致的劃分,每個劃分約55.66km; 余下各級照此類推[16]。
2.2 編碼規則
北斗三維網格位置碼由二維編碼+高度維編碼交叉組成[21],共32位碼元組成,北斗三維網格位置碼由12位碼元組成,其結構與碼元取值見圖3,第三維度編碼如下。

圖3 北斗三維網格位置碼的形式
3 基于北斗網格位置編碼的建構筑物空間位置編碼
定位建構筑物,需定位整棟建筑物和建筑物內部的構件實體[10]。建筑物外部所處坐標系是剛性的北斗網格位置體系,其平面坐標兩個軸是徑向和緯向,建筑物以標識中心為定位對象,賦予定位編碼,作為整體被組織和管理。建筑物自身既是全球網格體系子空間,又是建筑物內部信息父空間。建筑物內部,為保證內外劃分的可拓展性,外部的定位標識點為劃分的起點。確定好內部劃分起始點之后,平面兩軸的方向也與外部的全球位置坐標系兩個軸保持一致,分別是正北和正東方向。高度維則按照建筑物自身的樓層高度進行劃分。每一樓層的劃分也是直接遵循建筑物中已有的區域劃分,并且這些子空間在每一層中都會被賦予一個定位標識碼,每一層樓的子空間采用的均勻大小的矩形表示,構件實體最終就落在某個子空間中,在該三維空間中進行三個軸向方向的定位。
3.1 網格劃分和編碼方案
本小節討論各層次(建筑物—樓層—子空間)的標識點、劃分網格層級以及劃分后賦碼的規則。
(1)對整幢建筑物的標識
首先在全球范圍定位建筑物,進行唯一空間標識。建筑物的標識要選擇合適的標識點,用建筑物地面投影范圍中心作為標識點,而不是實際占地范圍。投影多邊形選擇層級合適的北斗網格進行劃分,選最靠近西南方向的內部角點作為建筑物的標識點O。現實中建筑物的距離一般都超過8m,選擇了北斗網格碼第7層級(1/4′)的網格進行劃分[20]。

圖4 整幢建筑物的定位過程
獲取標識點以后,于全球位置框架標識該點。某行政區域組織會管理多棟建筑物的數據,選建筑物所在行政中心為參考點定位。確定行政區劃中心和建筑物標識點,建立二維平面坐標系,確定整幢建筑物在該坐標系下的位置,選擇合適的層級L來確定跨越的網格數目M, N。
為避免兩棟建筑物的標識定位點落在同一個網格,失去唯一性,選擇大小合適的網格使其邊長不大于兩者的距離。第7層級的網格比較合適[20],但在距離過遠時,編碼的長度會冗長。若引入更小層級,雖能用更少跨度碼,但需加上該層級的標識。為平衡跨度網格數目和層級標識引入的標識位,除了第7層級以外,再選擇一個層級共同來標識跨度。最大兩位數的第七層級網格可覆蓋長度是24.75’<1′所以選擇第4層級和第7層級共同標識跨度。建筑物相對行政中心的偏移量為負, M、N要含有負號來區分相對方向。
(2)建筑物樓層高度維劃分與編碼
考慮建筑物的高度維劃分,劃分的起始平面規定在建筑物中的地面,往上為高度軸的正方向,反之為負方向,建筑物內部空間一般都分布在不同的樓層中,但也存在如某兩層樓層之間有轉角的樓梯,規定將這些設施劃分到它們下方的樓層空間內。
目前世界上最高建筑物—迪拜塔,總高度為828米,地上162層,連同地下共169層。地下層數一般不超過162層。樓層碼總共由五位組成:第一位是表示地上U或地下D,后三位為樓層數。如U021表示地上21層,D002表示地下二層,以此類推。
建構筑物編碼擴展到樓層高度為:C0MN-F。
(3)樓層平面劃分及子空間定位碼
建筑物中每個樓層中,很多構件需進一步劃分其空間得到更為精細的空間,確定構件的準確位置。為滿足外部劃分能夠擴展到內部的原則,采用的原點O是在對整幢建筑物定位時選擇的標識點,內部坐標系的x、y軸方向分別選擇了正東、正北方向,z軸方向則采用了建筑物樓層生長的方向,每個樓層高度上則是一個獨立的樓層坐標系。我們對整個樓層進一步劃分得到子空間,在樓層平面坐標系中對子空間進行定位和編碼。若選擇該空間水平面多邊形的一個頂點,可能會出現多個空間共用一個標識點的情況。
確定子空間的標識點,首先選擇層級,選擇用邊長1m的網格進行劃分區分子空間。每個空間都被多個網格劃分,網格的角點在空間中。我們選擇最靠近樓層坐標系原點的角點作為子空間的標識點,如圖5,得到B,C,F的子空間的定位點分別是B0,C0,F0。
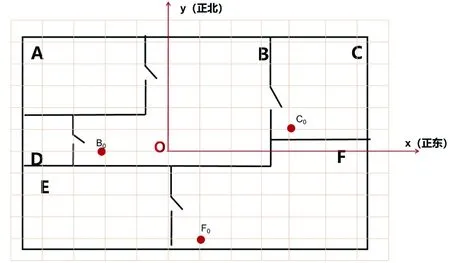
圖5 子空間標識點確定
得到各子空間標識點后,其在樓層平面坐標系中的正北、正東方向偏移分別是M′、N′。建構筑物編碼擴展到子空間層次的定位碼為:C0MN-F-M′N′。
(4)子空間內劃分與編碼
樓層平面坐標系中每個子空間內部都構造了自己的獨立坐標系,依靠樓層平面坐標系對它們進行關聯,以各自的子空間標識點距離樓層標識點的偏移量作為標識編碼。在子空間內部對構件三個維度上進行劃分,從而準確定位。
在三維子空間中進一步、更精確的位置定位樓層中某構件。某些構件彼此距離很近,采用尺度更小的網格作為劃分基本單元。在子空間內劃分采用9級網格比較合適[20]。子空間內構件坐標系定位編碼:劃分原點是在樓層子空間中子空間的標識點,以正東、正北方向為x, y軸,建筑生長方向為z軸。子空間內,對構件進行三維空間的定位編碼,得到三個軸方向的偏移量PQR。建構筑物編碼擴展到子空間內部的定位碼為:C0MN-F-M′N′-PQR
在該編碼體系中,C0MN是整幢建筑物全球環境定位的建筑物幢編碼; F是進入建筑物的高度維定位的樓層高度碼;M′N′是進入樓層的子空間在二維平面中坐標的樓層子空間定位碼;PQR是在子空間中的構件定位碼。
4 建構筑物空間標識位置編碼算法
4.1 建構筑物設計階段中編碼生成算法
在建筑物的設計階段對構件實體賦予了該編碼,在后續階段能夠基于該唯一性編碼進行多源數據的融合和信息的回溯[12]。
BIM頂點坐標中,提取x, y, z坐標最小與最大值,得構件最小值坐標Smin(Xmin,Ymin,Zmin)和最大值坐標Smax(Xmax,Ymax,Zmax),得到模型范圍,計算近似的空間中心點S0(X0,Y0,Z0):X0=(Xmax-Xmin)/2;Y0=(Ymax-Ymin)/2;Z0=(Zmax-Zmin)/2
若經緯度表達,直接按照全球浮點數坐標到編碼轉化[21],若相對參考系,可按照以下幾步:確定構件在BIM中局部坐標系,確定局部坐標系原點O,根據相互正交的三個軸其中兩個確定坐標系的方向; 確定轉化的目標坐標系,按照BIM文件中數據,若對構件提供其所在參考空間的信息,則目標坐標系為城市建構筑物的子空間坐標系, 若只提供其所在樓層參考空間坐標系,則目標坐標系為城市建構筑物多樓層坐標系,選定目標坐標系后,確定目標坐標系的原點O′,以正北、正東方向確定X′、Y′軸,得到Z′軸; 利用坐標轉化原理,將構件的中心點在構件局部坐標系中的坐標S0(X0、Y0、Z0)轉化到目標坐標系中。首先計算O′在坐標系O中的三個軸的偏移量(?x,?y,?z),再分別計算X′軸與X軸、Y軸、Z軸的夾角余弦值(cosα1,cosβ1,cosγ1),Z′軸與X,Y,Z 軸夾角的余弦值(cosα2,cosβ2,cosγ2),實體的標識點在建構筑物坐標系下的坐標可以通過等式T·S′=S得到,旋轉矩陣T可以表示為:
得到子空間的標識點和建筑物(樓層)的經緯度后,根據浮點數轉編碼的方法生成空間標識[20],該編碼成為了構件實體唯一的空間位置標識。
4.2 基于編碼模型的多源建構筑物數據整合算法
建筑物行業中許多場景,用空間位置關聯多源數據,例如:檔案關聯管理、自動巡檢、智能建造[19]。分析位置標識碼在多源數據整合中需求和可行性; 然后設計以編碼為RowKey的剖分索引大表,在此基礎上實現對建筑行業中多源數據的高效整合。
為實現建構筑物多源信息組織和管理,除統一標識全球的建構筑物信息,還需建立以該編碼為主鍵的索引大表關聯不同來源數據。選擇MongoDB[11]作為后臺數據庫設計,因其設計靈活、擴展性高; Nosql數據庫能處理不同層次的實體屬性種類相差大的問題; MongoDB按照鍵值對格式存儲管理的,編碼作為行鍵實現哈希表的O(1)查詢效率,行鍵是建構筑物空間標識編碼,屬性包括構件實體所在建筑物和子空間的標識點經緯度信息以及樓層數。
為實現基于空間標識的多源數據融合,該實體關聯的多源屬性信息,如設計圖紙,對應住戶的戶籍信息。索引大表也將這些信息的鏈接或文件地址關聯到該空間標識編碼,由此用戶可通過構件實體的位置得到建構筑物編碼,由于某個建筑物實體的編碼都是全數據表唯一的,能根據該編碼定位到數據庫中某實體的屬性字典,關聯到與該空間位置相關的多源數據。
4.3 基于編碼模型的數據檢索算法
以點查詢、范圍查詢和基于建筑物空間約束的距離查詢為例,進行數據檢索方法的說明。
(1)點查詢
點查詢是指查詢指定點鄰近區域的所有對象[11]。本研究場景下具體需求為:火災發生時,消防隊員所在位置附近的消防栓。這里的附近范圍僅限于同一樓層,如圖6中要查詢星號所在位置附近的物體,即是虛線圓圈的范圍,這個范圍是包括了三個子空間BCE的。

圖6 某樓層中進行點的KNN查詢
用編碼計算星號附近范圍,某樓層上的查詢可能跨越多個子空間,選擇樓層坐標系劃分第八層級(赤道距離1m)。查詢中心點坐標可以是經緯度坐標(x0,y0)。外包矩形西南和東北角點的經緯度分別是letlat, letlng, riglat, riglng。該樓層坐標系中外包矩形中的經緯度點(x,y)滿足x≥(letlat-Xf)andy≥(letlng-Yf)andx≤(riglat-Xf)andy≤(riglng-Yf)。這里(x,y)含義是在該局部坐標系中離原點的距離,建構筑物編碼后幾位是在局部坐標系中偏移的網格數。樓層坐標系劃分的網格尺度都是1/32,偏離的經緯度到網格數目到換算倍數是32×60×60。建構筑物編碼的完整結構C0MN_UXXX_M′N′,樓層坐標系下偏移量就是固定的M′N′兩位。M′N′帶正負號,并且將這個換算倍率表示為L,編碼的篩選條件為
M′≤L(riglat-Xf)andM′≥L(leflat-Xf)
N′≤L(riglng-Yf)andN′≥L(leflng-Yf)
(2)范圍查詢
范圍查詢指查詢框定范圍內所有的對象[11]。本研究場景下具體需求為:查詢某個房間內所有的橫梁,如圖7的子空間C; 或圈定一個任意閉合圖形要求查詢到其中包含的所有特定構件實體,如下圖跨越三個子空間ABD的藍色不規則陰影。
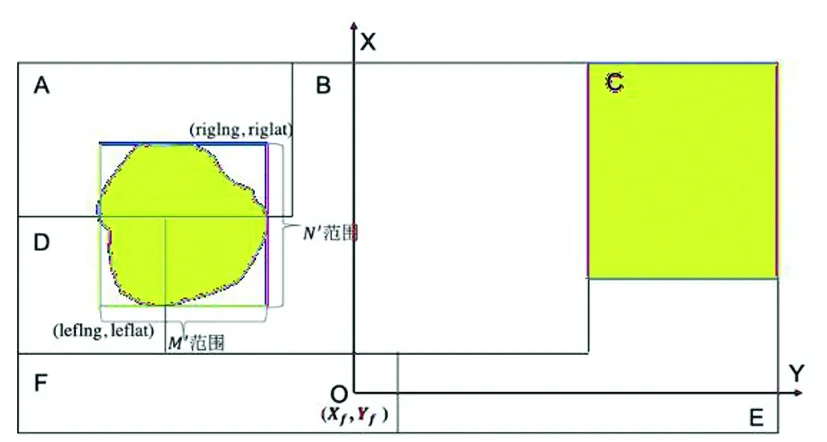
圖7 某樓層中的范圍查詢
基于外包矩形點查法,任意閉合圖形作為查詢范圍。若查詢范圍是建筑物中已劃分好的結構,輸入該子空間內某個經緯度點P(x,y),要求返回該點所在子空間某構件。計算P在坐標系O(xf,yf)中的坐標,再除以度到跨度數碼到換算倍率L,得到點P的偏移碼數目M′,N′。點P所在子空間標識點C0應離P點較近,C0在樓層坐標系中的偏移Mc,Nc應該滿足以下等式,且盡量小,即盡量趨近于一個定值:Mc2+Nc2=M′2+N′2+。存在子空間內任意一點到該空間標識點到距離其它子空間標識點更遠的情況,本文取離得最近的三個編碼值,然后到對應數據行的詳細屬性列中找到子空間輪廓的經緯度串,進行點是否在多邊形中的判斷,得到最終就可以用匹配算法得到所有子空間編碼為Mc,Nc的特定構件實體數據行。
(3)有約束條件的距離查詢
在建筑物內的查詢必須考慮建筑物本身的構造特點,如由于門的阻隔,位于兩個房間內構件A和B之間的距離,不是直線距離,且存在多條可通行路徑。給定一個查詢點和多個可能的目標點,有約束的距離查詢就是需要返回該查詢點到各個目標點的最短距離。

經緯度在兩個方向的距離能按照公式轉為平面距離,得到兩個節點之間的平面距離。
5 實驗
基于自主設計的建構筑物數據可視化和管理系統,本節從模型建立和應用開展編碼生成實驗、建筑物多源數據關聯和查詢等典型應用實驗,驗證編碼模型正確性、高效性和可行性。
建筑業BIM軟件種類多,數據格式不盡相同。本文實驗選擇Web端進行BIM模型的展示與功能實現,將Revit等BIM平臺的三維模型幾何空間數據解析,并通過WebGL顯示在Web端,后臺連接數據庫用于管理和查詢建構筑物相關的數據信息,通過Web端交互。
選擇B/S網絡應用框架驗證,基于WebGL與HTML5語言,該框架層次和功能如圖8。

圖8 實驗框架結構功能圖
(1)模型數據解析與模型重建
程序解析BIM數據,得到建筑物、子空間的標識點等絕對位置坐標,奠定后續操作基礎。Revit Architecture 建筑模型文件轉化成JSON格式文件,WebGL解析JSON并在終端進行可視化。導出的建筑物模型是要符合OBJ格式,包括四個內容:材料紋理、幾何特性、自定義元數據和object記錄對象屬性數據,通過標識符ID關聯到一個實體上。得到解析后的各個構件屬性,WebGL將模型數據可視化在Web端。圖9展示了模型重建后子空間以層次的效果圖和對應模塊部分屬性信息,其余層次的結果類似。
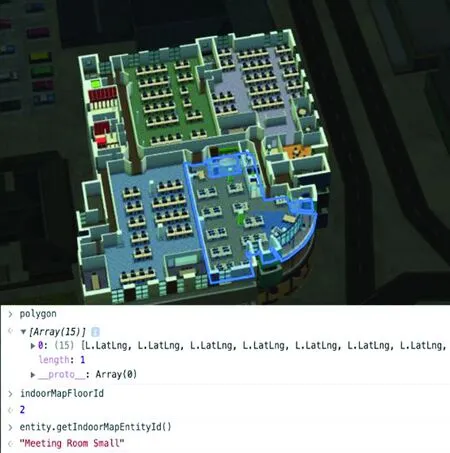
圖9 模型重建后子空間
(2)建構筑物模型的編碼生成試驗
解析出的構件關聯的子空間和建筑物輪廓信息,如圖10是實驗數據編碼結果。

圖10 編碼結果
(3)多源數據整合
按照數據之間關聯關系,將數據庫中多張數據表關聯便可以將多源數據整合到一起。關聯之后,構件的屬性信息中也含有相應的多源信息。構件數據表是以建構筑物編碼為JSON字典中的鍵,而值則是由多個屬性組成,實現基于鍵值對的快速查找。實驗結果,如圖11,進入子空間,任選一個實體都夠彈出構件自身屬性和所關聯的子空間的多源屬性。
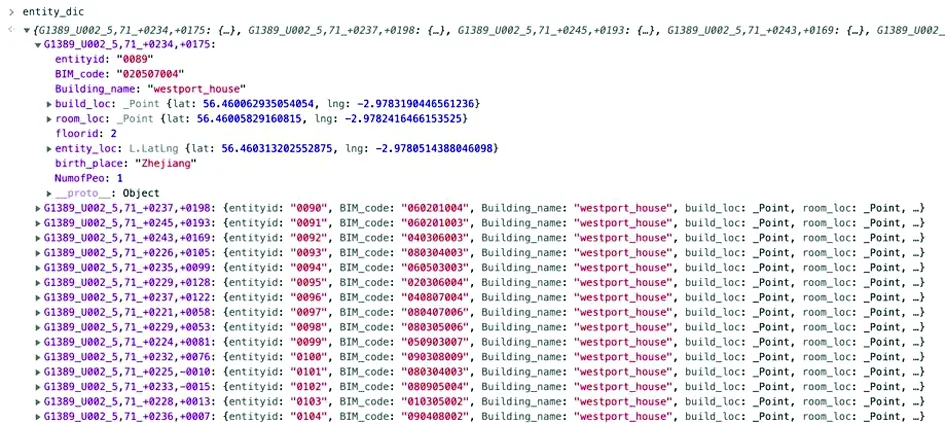
圖11 多源信息整合顯示結果
(4)基于編碼模型的數據查詢檢索實驗
(a)點查詢:以子空間的點查詢為例,用戶選查詢點,默認查詢半徑為10m,查詢結果如圖12。將編碼約束在外包矩形內,對編碼鍵值進行篩選,得到符合查詢條件的編碼集合。
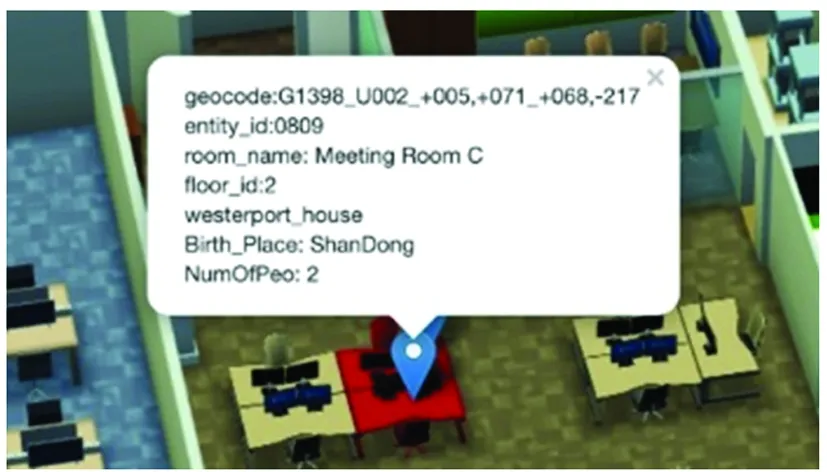
圖12 點查詢的結果
(b)范圍查詢
用戶任意指定某個范圍得到其中所有特定實體,可能是某個樓層,也可以是突破建筑物中既有邊界的不規則多邊形,如圖13。
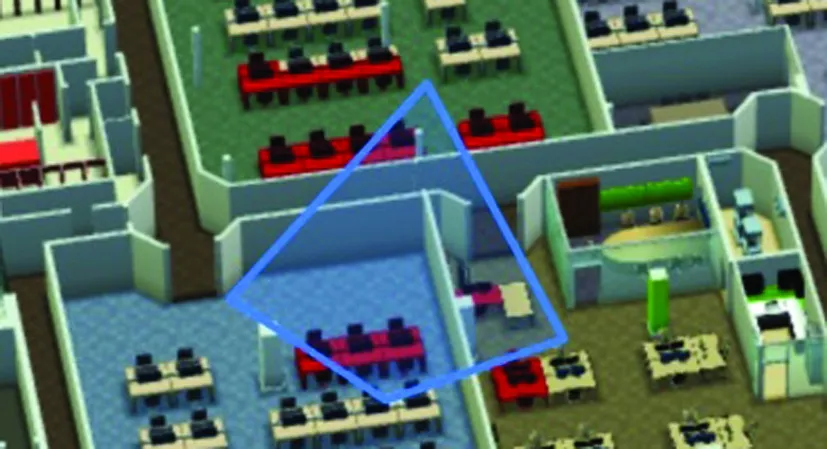
圖13 跨越室內邊界多邊形范圍查詢
(5)編碼對比
基于建構筑物編碼的范圍查詢的查準率較高,尤其是當查詢范圍是建筑物內固有的空間劃分時,查準率是幾乎是100%; 并且查詢的效率很高,只需要匹配編碼子空間編碼的兩個方向的跨度碼就可以直接得到查詢結果; 而在建筑物場景下這種查詢需求是比較常見的。而全球的剛性劃分網格忽略了對象實體自身的界限,比如北斗網格參考框架,每個劃分網格都是客觀存在,這些網格的邊界無法與建筑物內部結構貼合,在圖14的查詢場景下,只能夠根據該子空間的外包面片進行查詢。外包面片的范圍與子空間實際范圍的差別很大,導致查準率較低,會包括許多非目標實體; 如果采用層級更大的小網格進行聚合,擬合子空間這樣的不規則多邊形則需要不斷的迭代計算,運算量大效率不高。圖14顯示了全球剛性網格劃分的效果示意圖。

圖14 全球剛性網格劃分結果(左圖是外包網格,右圖是精細填充網格)
6 總結與展望
建筑信息管理對建設項目實施、建筑業宏觀管理作用巨大,它既是項目管理的職能,又是項目管理的基礎。建筑領域IT技術充分發揮作用需要建筑信息的規范化、標準化和統一化,這也是建筑業信息化的基礎環節。
但建立建筑空間標識位置編碼是一項系統工程,本文對建筑空間標識位置編碼的框架進行分析,發現現有規則有不統一、效率不高等問題,提出了一種基于北斗網格的建構筑物編碼規則,以及對應的點查詢、范圍查詢、距離查詢等算法,來解決這些問題。許多問題仍需進一步深化研究:
(1)研究如何改進建構筑物空間標識位置編碼,進一步提高查準率,在異構跨庫環境下提高構件檢索效率;
(2)為實現建筑及其構件的精細化、自動化裝配,為構件添加連接件,在計算機編程環境下通過識別特定位置連接件的編碼完成構件的自動化裝配;
(3)空間標識位置編碼的操作大多都是通過手動方式運行完成,在初期應用中的建構筑物數量不多的情況下能滿足任務需求,但構件數量急劇增長時,若能自動對新增數據進行建構筑物空間標識位置編碼,并進行自動入庫,可以提高其效率。