相參處理間隔較短條件下基于稀疏重構(gòu)及形態(tài)成分分析的航管雷達(dá)風(fēng)電場雜波抑制
2021-07-29 03:34:06何煒琨畢峰華王曉亮
電子與信息學(xué)報 2021年7期
何煒琨 畢峰華 王曉亮 張 瑩
(中國民航大學(xué)天津市智能信號與圖像處理重點實驗室 天津 300300)
1 引言
風(fēng)能是一種清潔而穩(wěn)定的新能源,在環(huán)境污染和溫室氣體排放日益嚴(yán)重的今天,風(fēng)力發(fā)電作為全球公認(rèn)的可以有效減緩氣候變化、提高能源安全、促進(jìn)低碳經(jīng)濟增長的方案,得到各國政府、機構(gòu)和企業(yè)的高度關(guān)注[1,2]。近年來我國風(fēng)力發(fā)電產(chǎn)業(yè)飛速發(fā)展[3]。研究表明,風(fēng)電場回波可能對航管監(jiān)視雷達(dá)的目標(biāo)檢測產(chǎn)生負(fù)面影響[4–9],使得航管監(jiān)視雷達(dá)出現(xiàn)目標(biāo)檢測概率降低、虛警率上升等問題。因此,風(fēng)電場雜波抑制技術(shù)的研究對于提升航管監(jiān)視雷達(dá)工作性能、保障空中交通安全具有重大意義。
近些年來,國內(nèi)外很多學(xué)者從信號處理方面對風(fēng)電場雜波抑制技術(shù)展開研究。Naqvi等人[10]及南京電子技術(shù)研究所曹永貴等人[11]分別利用匹配追蹤(Matching Pursuit, MP)和正交匹配追蹤(Orthogonal Matching Pursuit, OMP)算法對雜波進(jìn)行抑制,兩種算法都需要構(gòu)造風(fēng)輪機雜波字典,計算量較大且需要一定量的先驗信息才能保證算法性能。Karabayir等人[12]提出一種基于CLEAN算法的風(fēng)輪機雜波抑制方法,通過構(gòu)造僅含風(fēng)輪機雜波的輔助回波信號,將該回波信號從雷達(dá)接收回波中減去實現(xiàn)風(fēng)輪機雜波抑制,但是在構(gòu)造輔助回波信號的時候需要一定量先驗信息。本文在航管雷達(dá)風(fēng)電場雜波抑制方面也開展了一系列研究工作。對于風(fēng)電場雜波(或雜波擴展主瓣)與飛機目標(biāo)不在同一距離單元的場景,利用風(fēng)輪機雜波的頻譜展寬特征使用譜中心補償方法抑制雜波[13],對于風(fēng)電場雜波(或雜波擴展主瓣)與飛機目標(biāo)在同一距離單元的場景,在回波數(shù)據(jù)充足并且具有一定先驗信息的基礎(chǔ)上基于缺省數(shù)據(jù)幅度和相位估計(Gapped-data Amplitude and Phase EStimation, GAPES)算法實現(xiàn)風(fēng)輪機回波兩個相反多普勒頻率峰值之間缺省數(shù)據(jù)的重構(gòu),對重構(gòu)后的數(shù)據(jù)利用雜波的周期性進(jìn)行抑制[14]。
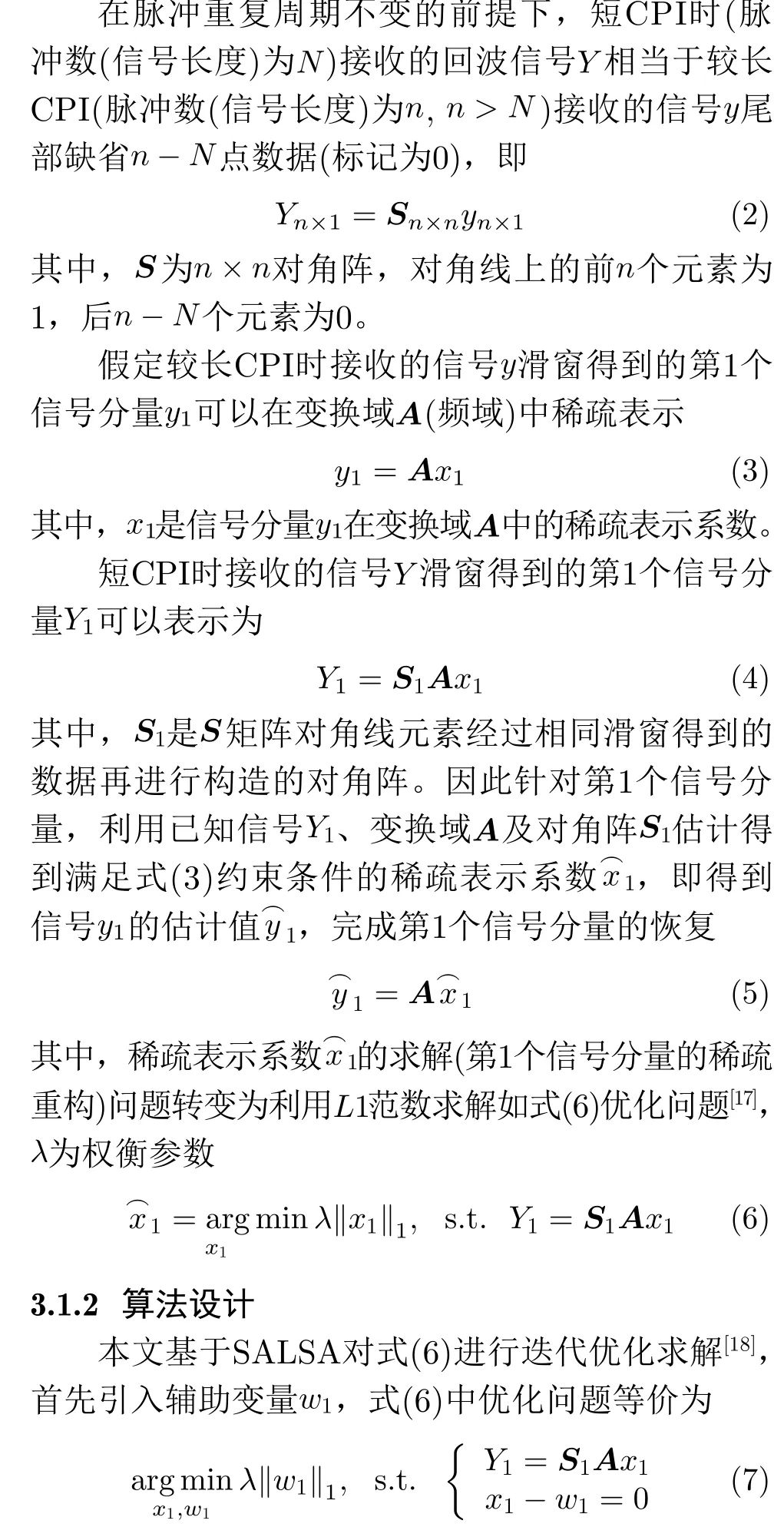
Uysal等人[15]根據(jù)稀疏優(yōu)化理論,提出基于形態(tài)成分分析(Morphological Component Analysis,MCA)算法實現(xiàn)風(fēng)輪機雜波抑制,根據(jù)風(fēng)輪機雜波與飛機目標(biāo)在不同變換域的稀疏性,分離出風(fēng)輪機雜波。該方法可以處理目標(biāo)與雜波處于同一距離單元問題,同時由于不需要建立字典,計算效率相比MP等貪婪算法更高。之后第38研究所的夏鵬等人[16]利用該方法對凝視模式下的風(fēng)輪機雜波進(jìn)行了有效抑制。但是在掃描模式中,相參處理間隔(Coherent Processing Interval, CPI)較短常常會造成相干脈沖數(shù)較少,由此導(dǎo)致回波信號譜分辨率降低及風(fēng)輪機雜波的時變多普勒特征不明顯等問題,MCA算法性能受到影響,因此本文針對短CPI條件下風(fēng)電場先驗信息不足且雜波(或雜波擴展主瓣)與目標(biāo)處于同一距離單元場景下的風(fēng)輪機雜波抑制問題進(jìn)行討論。
本文針對實際雷達(dá)系統(tǒng)中短CPI造成的譜分辨率較低及各信號分量變換域稀疏性不明顯導(dǎo)致MCA算法性能下降的問題,首先利用稀疏重構(gòu)算法提高信號譜分辨率和稀疏性,在此基礎(chǔ)上利用MCA算法完成對風(fēng)輪機雜波的抑制。
2 基于MCA的風(fēng)電場雜波抑制
MCA算法利用不同信號在不同變換域的不同稀疏特性實現(xiàn)信號的分離[15]。風(fēng)輪機由于葉片不斷運動旋轉(zhuǎn)會產(chǎn)生時變多普勒的特征,因此認(rèn)為風(fēng)輪機雜波在時頻域相比頻域更加稀疏;在一個CPI內(nèi),飛機目標(biāo)可認(rèn)為是恒速運動的,所以其多普勒頻率是恒定的,因此認(rèn)為飛機目標(biāo)的頻域稀疏性更好[15,16]。
風(fēng)電場雜波抑制問題實際上就是將回波信號中飛機目標(biāo)和風(fēng)輪機雜波進(jìn)行分離問題。已知飛機信號和風(fēng)輪機雜波可以分別在頻域和時頻域進(jìn)行稀疏表示,根據(jù)MCA的理論,可轉(zhuǎn)變?yōu)榍蠼庑盘柵c雜波在頻域和時頻域的最優(yōu)表示系數(shù)的問題。針對此問題可通過分裂增廣拉格朗日收縮算法(Split Augmented Lagrangian Shrinkage Algorithm,SALSA)[17]迭代優(yōu)化求解,完成信號的分離。MCA算法中變換域矩陣A通常滿足帕塞瓦爾形式[17],即

其中,(·)H表示共軛轉(zhuǎn)置;p為帕塞瓦爾常數(shù),通常設(shè)置為1;I是單位陣。
依據(jù)MCA算法原理,算法性能取決于待分離信號(目標(biāo)與雜波)是否能在不同的變換域進(jìn)行稀疏表示。實際應(yīng)用中存在的短CPI條件下接收到的雷達(dá)回波信號由于觀測時間較短,飛機信號和風(fēng)輪機雜波的頻域稀疏性相近且風(fēng)輪機雜波的時變多普勒特征不夠明顯,此時MCA算法的性能將會受到影響。
3 稀疏重構(gòu)算法
3.1 雷達(dá)回波稀疏重構(gòu)
根據(jù)以上分析可知,風(fēng)輪機雜波會產(chǎn)生時變多普勒,因此在時頻域中稀疏性比頻域要好。但在瞬態(tài)時間內(nèi),風(fēng)輪機多普勒頻率幾乎不變,認(rèn)為瞬態(tài)風(fēng)輪機回波可在頻域稀疏表示,同時飛機目標(biāo)可在頻域稀疏表示,因此風(fēng)電場雷達(dá)回波滑窗得到的瞬態(tài)信號分量(包括飛機、風(fēng)輪機)可以在頻域進(jìn)行稀疏表示。
本文所采用的稀疏重構(gòu)算法,首先短CPI回波數(shù)據(jù)相當(dāng)于較長CPI回波數(shù)據(jù)發(fā)生了尾部數(shù)據(jù)缺省;其次依據(jù)風(fēng)電場雷達(dá)瞬態(tài)回波可以在頻域稀疏表示理論,給出缺省數(shù)據(jù)的重構(gòu)算法,即對滑窗得到的逐個信號分量基于分裂增廣拉格朗日收縮算法(SALSA)求解回波數(shù)據(jù)在頻域的最優(yōu)表示系數(shù),完成各信號分量中缺省數(shù)據(jù)的恢復(fù),再由恢復(fù)后的多個信號分量逆滑窗重構(gòu)完整數(shù)據(jù),提升短CPI情況下雷達(dá)回波譜分辨率及信號的稀疏特征。
3.1.1 問題描述
其次利用增廣拉格朗日方法(Augmented Lagrangian Method, ALM)[19]反復(fù)迭代,求解w1和x1,直到收斂。具體實現(xiàn)如表1所述。
表1中,d類似于拉格朗日乘數(shù),通常初始化為0向量;μ為步長。式(8)中的優(yōu)化問題可以利用軟閾值方法求解;式(9)中優(yōu)化問題是一個有約束的最小二乘問題,可利用洛必達(dá)法則及矩陣運算對其進(jìn)行求解。上述求解過程可進(jìn)一步進(jìn)行簡化,如表2所示。
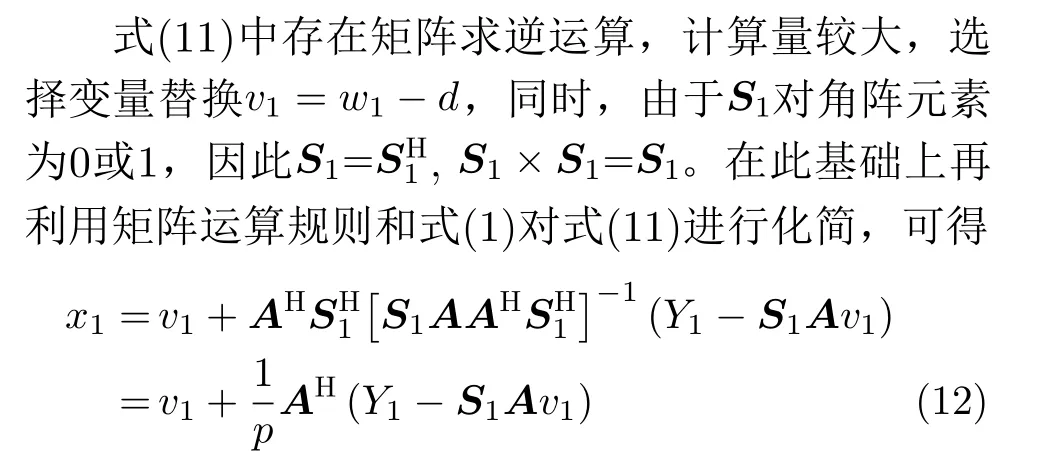
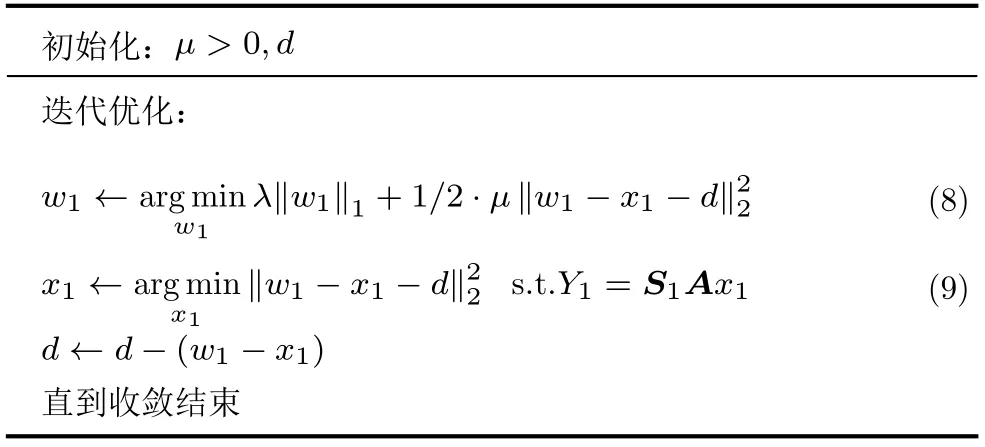
表1 ALM迭代求解算法
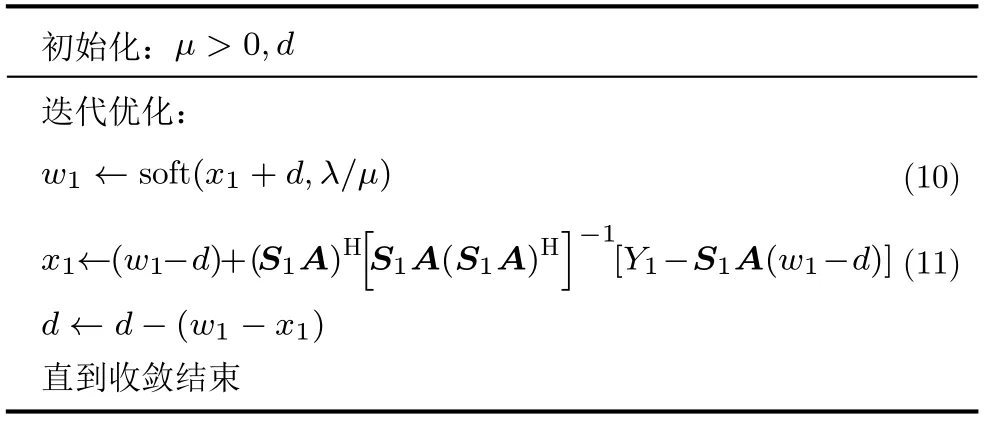
表2 對應(yīng)化簡求解算法
式(12)避免求逆運算,以此降低該算法的計算量,因此得到最終算法,如表3所示。以此獲取第1個信號分量中缺省數(shù)據(jù)的恢復(fù)。短CPI數(shù)據(jù)稀疏重構(gòu)的過程就是逐個信號分量中缺省數(shù)據(jù)恢復(fù)的過程。
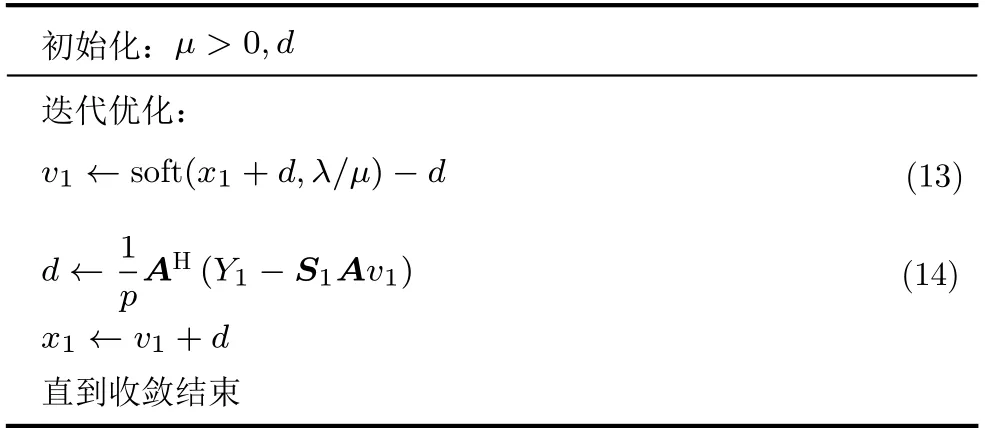
表3 最終求解算法
3.2 基于稀疏重構(gòu)及MCA的風(fēng)電場雜波抑制
依據(jù)3.1節(jié),航管雷達(dá)短CPI回波數(shù)據(jù)的稀疏重構(gòu)問題,可轉(zhuǎn)變?yōu)榛昂笾饌€信號分量通過SALSA在頻域迭代優(yōu)化求解最優(yōu)表示系數(shù),繼而進(jìn)行逆滑窗完成缺省數(shù)據(jù)的恢復(fù)問題,在此基礎(chǔ)上基于傳統(tǒng)MCA算法進(jìn)行雜波抑制,以此解決短CPI條件下MCA雜波抑制性能下降的問題。基于稀疏重構(gòu)及MCA的風(fēng)電場雜波抑制實現(xiàn)框圖如圖1所示。

圖1 基于稀疏重構(gòu)及MCA算法的風(fēng)電場雜波抑制實現(xiàn)框圖
4 實驗結(jié)果及分析
4.1 實驗設(shè)計
本文實驗主要從雷達(dá)視線與風(fēng)輪機某個葉片是否發(fā)生垂直兩種情況進(jìn)行分析。對于一個CPI內(nèi)風(fēng)輪機某個葉片與雷達(dá)視線是否垂直,可以利用風(fēng)輪機雜波在垂直條件下會產(chǎn)生頻譜展寬進(jìn)行判斷;還可以利用本課題組之前方案,基于霍夫變換進(jìn)行判斷[14],在此不再贅述。
首先雷達(dá)視線與風(fēng)輪機單個葉片發(fā)生垂直條件下,基于MCA算法對仿真數(shù)據(jù)進(jìn)行處理,并利用實測數(shù)據(jù)進(jìn)行驗證,對實測的僅含風(fēng)電場雜波數(shù)據(jù)進(jìn)行地雜波濾除后計算風(fēng)輪機雜波平均功率,再按照一定的信雜比(Signal-to-Clutter Ratio, SCR)約束人為添加飛機目標(biāo),對比分析實驗結(jié)果。其次雷達(dá)視線與單個風(fēng)輪機葉片非垂直情況下,針對仿真及實測數(shù)據(jù)分別基于MCA和稀疏重構(gòu)后的MCA算法進(jìn)行風(fēng)電場雜波抑制,對比分析實驗結(jié)果及算法性能。
4.2 垂直條件下的風(fēng)電場雜波抑制
本節(jié)主要討論短CPI條件下雷達(dá)視線與某一葉片發(fā)生垂直情況下的雜波抑制問題。分別針對仿真及實測數(shù)據(jù)進(jìn)行處理驗證。
4.2.1 仿真數(shù)據(jù)
參考典型風(fēng)輪機模型以及雷達(dá)的相關(guān)參數(shù)[14],仿真參數(shù)如表4、表5所示。提取某一特定距離單元(距離單元數(shù)為221)的接收信號,接收信號對應(yīng)的幅度譜如圖2(a)所示,圓圈處為飛機目標(biāo)。基于MP算法雜波抑制后的結(jié)果如圖2(b)所示;基于MCA算法分離飛機目標(biāo)及風(fēng)輪機雜波,結(jié)果如圖2(c)和圖2(d)所示。可以看出,無論MP算法還是MCA算法都能有效地完成雜波抑制。
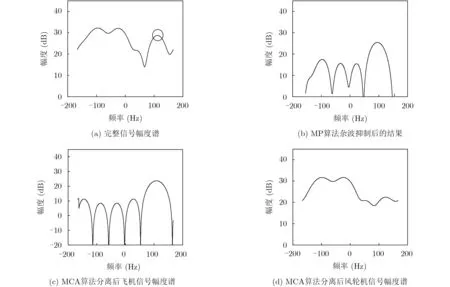
圖2 MP及MCA算法的雜波分離(抑制)結(jié)果
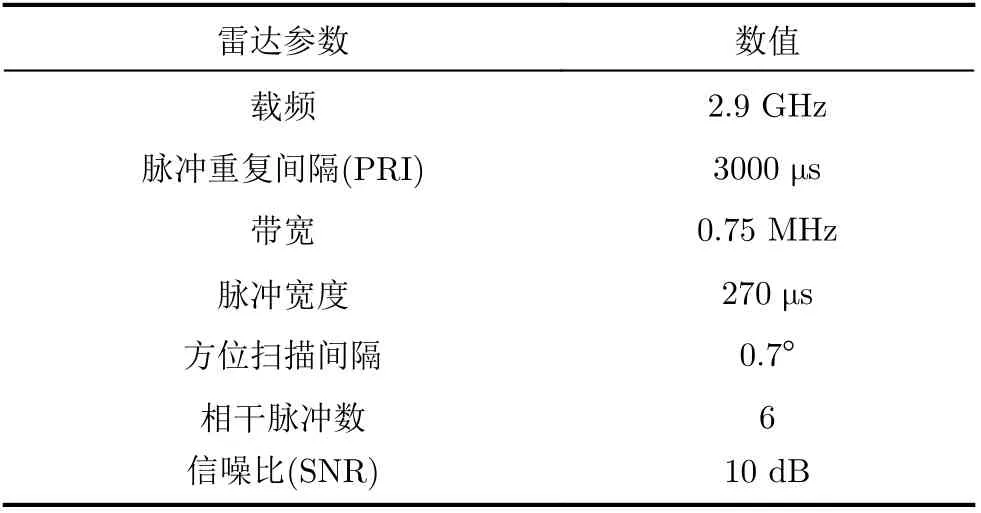
表4 雷達(dá)參數(shù)
表5 風(fēng)輪機參數(shù)
4.2.2 實測數(shù)據(jù)
實測數(shù)據(jù)的相關(guān)參數(shù)如表6所示。從只有風(fēng)電場雜波的實測數(shù)據(jù)中篩選垂直狀態(tài)下相應(yīng)距離單元回波數(shù)據(jù)(第698幀364距離單元數(shù)據(jù))。去0通道后以SCR-20 dB為約束加入飛機目標(biāo)后的信號幅度譜如圖3(a)所示,圓圈處為飛機目標(biāo)。此時可以觀察到幅度譜右側(cè)存在明顯展寬。對該數(shù)據(jù)基于MP算法及MCA算法進(jìn)行雜波抑制,從圖3中可以看出,MP算法雜波抑制后的結(jié)果如圖3(b)所示。基于MCA算法雜波抑制結(jié)果如圖3(c)和圖3(d)所示。由圖3可看出,MP算法雜波抑制效果不是很理想;MCA算法處理后飛機信號可以分離出來,大部分風(fēng)輪機雜波得到有效抑制。

圖3 MP及MCA算法的雜波分離(抑制)結(jié)果
表6 實測數(shù)據(jù)相關(guān)參數(shù)
由實驗結(jié)果可知,短CPI條件下,當(dāng)雷達(dá)視線與風(fēng)輪機單個葉片發(fā)生垂直時,MCA算法更容易在頻域獲取飛機信號的最優(yōu)表示系數(shù),以此解決該條件下的風(fēng)輪機雜波抑制問題。但是MP算法的性能依賴于字典,并不穩(wěn)定。進(jìn)而相對于MCA方法而言,MP算法的雜波抑制性能難以保證。
需要說明的是,當(dāng)飛機信號頻譜在風(fēng)輪機頻譜展寬范圍內(nèi)時,MCA算法也能有效抑制風(fēng)輪機雜波。因此MCA算法可以解決短CPI條件下雷達(dá)視線與單個葉片發(fā)生垂直時的雜波抑制問題。
4.3 非垂直條件下的風(fēng)電場雜波抑制
本節(jié)主要討論短CPI條件下信號譜分辨率較低、稀疏特征不明顯導(dǎo)致MCA算法性能下降的問題。分別針對仿真及實測數(shù)據(jù)進(jìn)行處理并驗證。
4.3.1 仿真數(shù)據(jù)
仿真參數(shù)如表4、表5所示,其中相干脈沖數(shù)為4,單個葉片與雷達(dá)波束初始夾角為60°。雷達(dá)回波幅度譜如圖4(a)所示,圓圈處為飛機目標(biāo)。對該數(shù)據(jù)基于傳統(tǒng)MCA算法及本文方法進(jìn)行雜波抑制,結(jié)果如圖4所示。
從圖4中可以看出短CPI條件雷達(dá)視線與某個葉片非垂直狀態(tài)下,回波信號譜分辨率較低,飛機和風(fēng)輪機回波的頻域稀疏性相近且風(fēng)輪機回波的時頻域稀疏性不明顯,導(dǎo)致MCA算法不能進(jìn)行有效的雜波抑制;稀疏重構(gòu)后數(shù)據(jù)回波譜分辨率有所提高,飛機信號的頻域稀疏性相對更好,此時利用MCA算法可以得到想要的飛機信號。因此稀疏重構(gòu)后的MCA算法可以解決短CPI條件下雷達(dá)視線與單個葉片非垂直時的雜波抑制問題。多次實驗發(fā)現(xiàn)當(dāng)相干脈沖數(shù)小于等于4個時,MCA算法難以完成雜波抑制,此時可以采用本文的稀疏重構(gòu)與MCA結(jié)合的算法進(jìn)行處理。
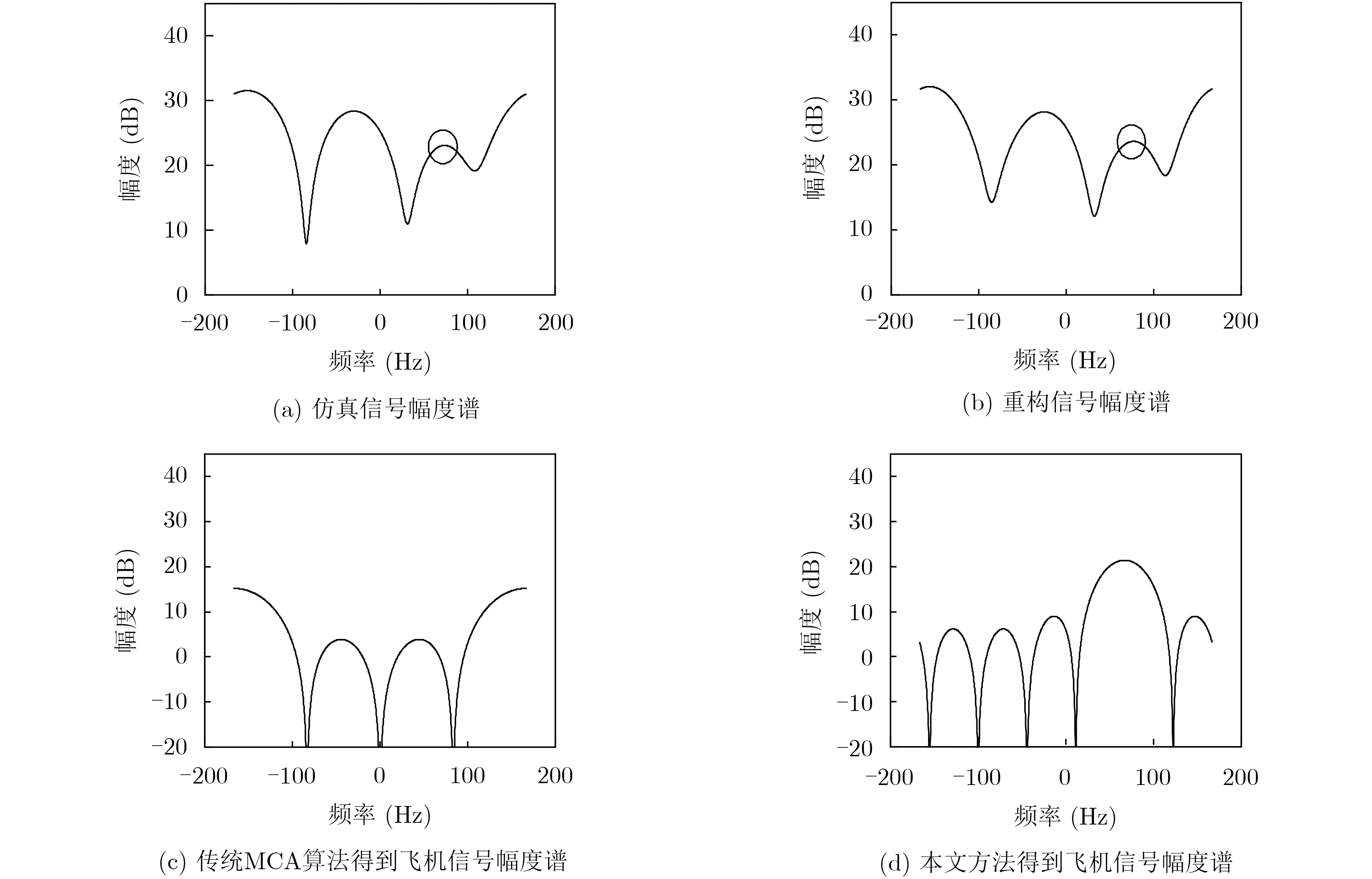
圖4 傳統(tǒng)MCA算法和本文方法仿真結(jié)果
4.3.2 實測數(shù)據(jù)
實測數(shù)據(jù)的相關(guān)參數(shù)如表6所示。為得到短CPI實測數(shù)據(jù),文中實測數(shù)據(jù)在已知雜波所在距離單元時,提取該距離單元(第30幀416距離)風(fēng)電場雜波實測數(shù)據(jù),在此基礎(chǔ)上,根據(jù)該距離單元雜波的平均功率及相應(yīng)的SCR,相干疊加仿真飛機目標(biāo)回波(雷達(dá)參數(shù)與實測數(shù)據(jù)所用雷達(dá)參數(shù)一致),以此構(gòu)造待處理的雷達(dá)回波數(shù)據(jù)。選取前5個脈沖數(shù)據(jù)去零通道后在SCR約束下添加飛機目標(biāo)后的幅度譜如圖5(a)所示,圓圈處為飛機目標(biāo)。對該數(shù)據(jù)基于傳統(tǒng)MCA算法及本文方法進(jìn)行雜波抑制,結(jié)果如圖5所示。
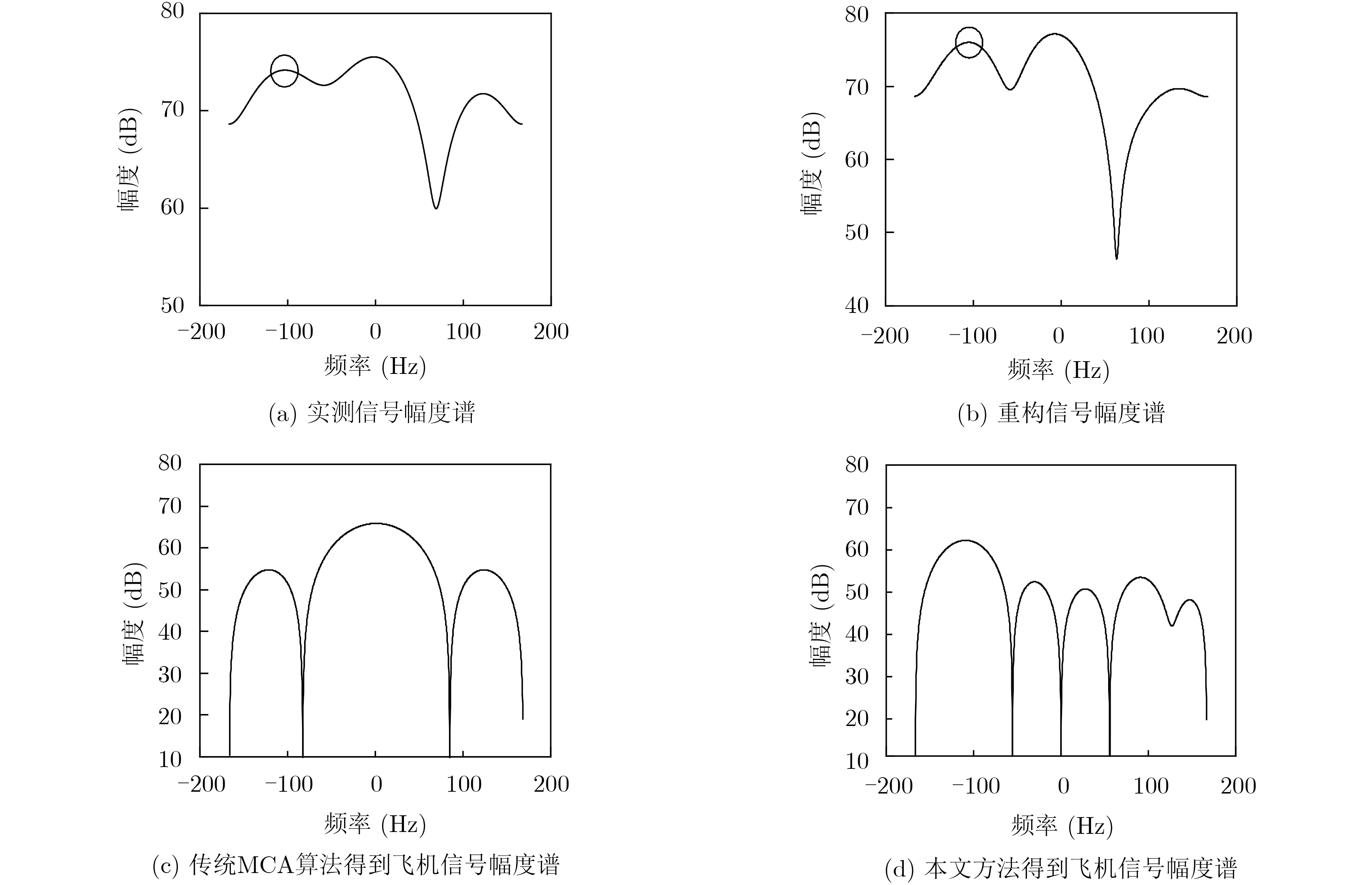
圖5 傳統(tǒng)MCA算法和本文方法實測結(jié)果
通過對實測數(shù)據(jù)的處理,可以得出與仿真數(shù)據(jù)同樣的結(jié)論,稀疏重構(gòu)可以提高回波信號譜分辨率及稀疏特性,進(jìn)而提升MCA算法的雜波抑制性能。
需要說明的是,當(dāng)回波頻譜里無法體現(xiàn)飛機信號特性時,該稀疏重構(gòu)算法應(yīng)用受限。另外在多次實驗中嘗試較長CPI接收的數(shù)據(jù)中低于40%的數(shù)據(jù)遭遇空間強干擾導(dǎo)致其中某些數(shù)據(jù)無效時,該稀疏重構(gòu)算法能將完整信號恢復(fù)出來,再利用MCA算法可以對風(fēng)輪機雜波成功抑制。
5 結(jié)束語
針對短CPI導(dǎo)致的航管監(jiān)視雷達(dá)回波數(shù)據(jù)譜分辨率降低及信號分量變換域稀疏特性不明顯,難以采用傳統(tǒng)MCA算法對雜波進(jìn)行抑制的問題,本文提出稀疏重構(gòu)算法和MCA算法結(jié)合來解決。首先稀疏重構(gòu)處理能提高短CPI條件下回波數(shù)據(jù)譜分辨率和稀疏特性,其次MCA算法可以處理目標(biāo)與雜波處于同一距離單元問題。實驗結(jié)果表明,針對短CPI造成的有效數(shù)據(jù)不足問題,經(jīng)過稀疏重構(gòu)后信號的譜分辨率明顯提高,同時飛機信號的頻域稀疏性有所提升,此時MCA算法能夠?qū)w機信號分離出來,同時雜波得到有效抑制。與MP算法相比,本文方法的性能不受限于字典的構(gòu)建。另外,需要說明的是,本文方法適應(yīng)于一個距離單元存在一臺風(fēng)輪機的情況,對于一個距離單元存在多臺風(fēng)輪機的情況,是后續(xù)的研究重點。
猜你喜歡
小哥白尼(軍事科學(xué))(2022年3期)2022-06-09 03:11:24
環(huán)球時報(2022-05-30)2022-05-30 15:16:57
鴨綠江(2021年35期)2021-04-19 12:24:18
民用飛機設(shè)計與研究(2020年4期)2020-11-27 17:34:02
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
當(dāng)代陜西(2019年11期)2019-06-24 03:40:28
中國生殖健康(2019年3期)2019-02-01 06:12:26
作文周刊·小學(xué)一年級版(2017年9期)2017-06-20 00:19:33
小學(xué)生導(dǎo)刊(低年級)(2016年8期)2016-09-24 22:09:04
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25