形狀記憶合金驅(qū)動的柔性仿人手設(shè)計與分析*
2021-07-30 09:36:44黃東煜林尚燦蘇滿佳
機械工程與自動化 2021年4期
黃東煜,林尚燦,蘇滿佳
(廣東工業(yè)大學(xué) 機電工程學(xué)院,廣東 廣州 510006)
0 引言
隨著機器人技術(shù)的發(fā)展,人們對仿人服務(wù)型機器人的逼真程度提出了更高的要求。作為服務(wù)型機器人的關(guān)鍵執(zhí)行件,由軟材料制作而成的柔性仿人手能在最大程度上模仿人手在受力時的變形,使互動者不會感覺到觸碰剛性機械結(jié)構(gòu)時的生冷感[1]。為此,國內(nèi)外學(xué)者嘗試用硅膠鑄造[2]、3D打印軟材料[3]的方式開發(fā)繩驅(qū)動柔性仿人手。但繩驅(qū)動方式要求在仿人手中安裝電機,導(dǎo)致結(jié)構(gòu)不夠緊湊。
形狀記憶合金(SMA)是一種新型智能材料,在受熱時能產(chǎn)生很大的收縮應(yīng)力。將SMA絲嵌入機器人本體中,可以實現(xiàn)驅(qū)動器和執(zhí)行器一體化,提高結(jié)構(gòu)的緊湊性[4]。因此研究人員使用SMA絲替代傳統(tǒng)繩驅(qū)動方式中的繩索,開發(fā)了各種類型的軟手指[5-8]。但這些軟手指結(jié)構(gòu)復(fù)雜,裝配困難。針對這些不足,本文提出了一種基于SMA絲驅(qū)動的新型柔性仿人手,其軟手指通過硅膠鑄造的方式一體成型,整體結(jié)構(gòu)簡單、緊湊,具有良好的逼真度。
1 仿生設(shè)計
人指的指節(jié)由堅硬的骨骼和包覆在其周圍的軟性皮膚層組成,在指節(jié)的連接處具有一個轉(zhuǎn)動關(guān)節(jié),通過肌絲收縮牽動手指彎曲變形。結(jié)合人指的結(jié)構(gòu)特征,根據(jù)服務(wù)型仿人手的功能要求,本文提出了一種軟手指的設(shè)計方案。該軟手指由堅硬的塑料骨骼和柔軟的硅膠皮膚組成,其結(jié)構(gòu)如圖1所示。
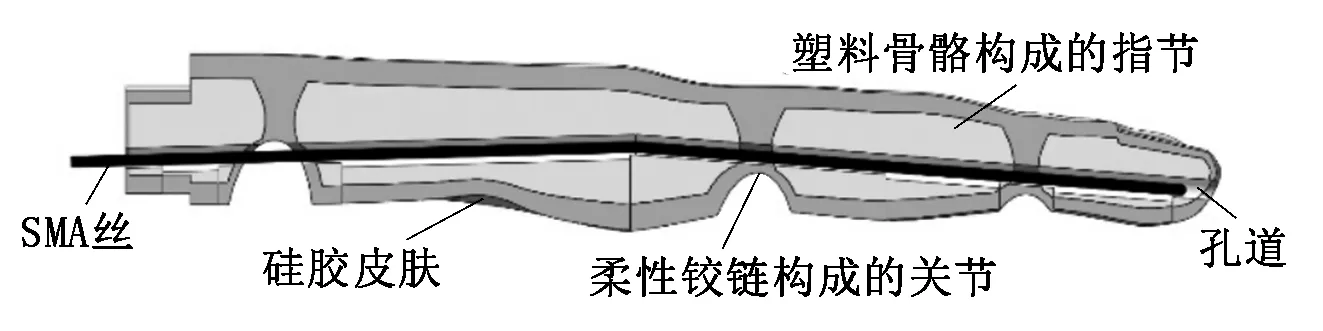
圖1 軟手指的仿生結(jié)構(gòu)
每根軟手指內(nèi)部設(shè)有兩條孔道,一根SMA絲從手指根部穿入,繞過指尖再從手指根部穿出,作為驅(qū)動手指彎曲的肌絲。軟手指的關(guān)節(jié)處僅由硅膠填充,構(gòu)成柔性鉸鏈,允許相鄰指節(jié)相對轉(zhuǎn)動。柔性鉸鏈的形狀為橢圓弧,因其更有利于關(guān)節(jié)的轉(zhuǎn)動變形,具有良好的綜合性能。在外部控制器輸入電流的情況下,手指內(nèi)部的SMA絲受熱收縮,牽動手指變形。
2 軟手指的驅(qū)動模型
2.1 SMA絲的驅(qū)動特性
在完全相變的溫度下,SMA絲的收縮率約為4%,收縮應(yīng)力約為200 MPa。本文所設(shè)計的軟手指采用具有雙程形狀記憶效應(yīng)的SMA絲,有利于彎曲后的手指在斷電后自行恢復(fù)原狀。以中指為例,所使用的SMA絲直徑D=0.3 mm,從指尖到手掌固定端子的有效長度L約為130 mm。SMA絲在手指內(nèi)部穿越了兩次。驅(qū)動手指的張力T和最大行程ΔLmax分別為:
T=2p(πD2/4).
(1)
ΔLmax=εL.
(2)
其中:p為收縮應(yīng)力;ε為收縮率。將相關(guān)參數(shù)代入式(1)和式(2),計算得到中指SMA絲驅(qū)動器輸出的驅(qū)動力為28.2 N,最大行程為5.2 mm。
2.2 軟手指的受力分析
本文所設(shè)計的柔性仿人手面向仿人服務(wù)型機器人,目標是實現(xiàn)與人握手等基本交互動作。為了保證仿人手在握手時有合適的握力,本節(jié)以中指為例,分析其握手時的狀態(tài)。握手時中指的運動和受力情況如圖2所示。
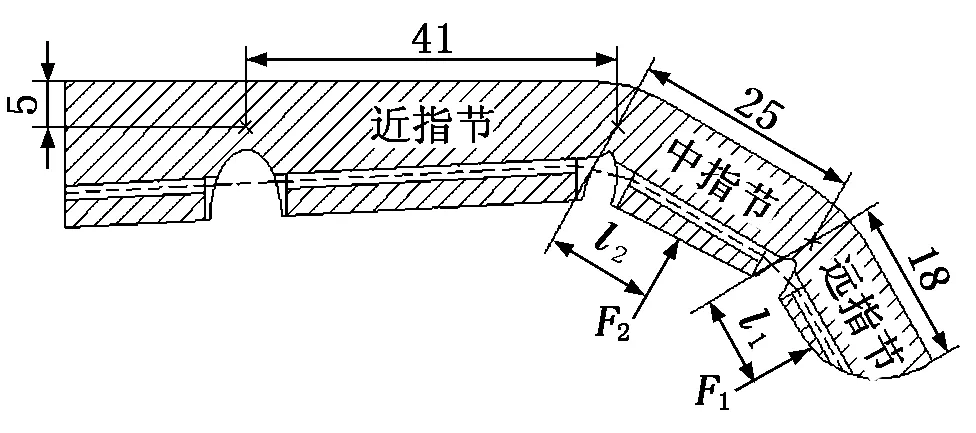
圖2 握手時中指的運動和受力情況
圖2中,虛線表示手指內(nèi)部的SMA絲,交叉點表示關(guān)節(jié)的近似轉(zhuǎn)動中心,F(xiàn)i為各指節(jié)承受的壓力,li為對應(yīng)的力臂。據(jù)實際觀察和測量,人們握手時幾乎僅遠指節(jié)和中指節(jié)發(fā)生轉(zhuǎn)動,并在相應(yīng)位置承受壓力,轉(zhuǎn)角、壓力及其力臂的數(shù)值如表1所示。據(jù)觀察,握手時近指節(jié)相關(guān)數(shù)據(jù)近似為零。

表1 握手時中指各指節(jié)的運動和受力參數(shù)
為了確定SMA絲所需要的驅(qū)動力臂大小,分別取遠指節(jié)部分、遠指節(jié)和中指節(jié)組成的部分為分離體,忽略SMA絲與手指本體的摩擦,對其作受力分析,如圖3所示。
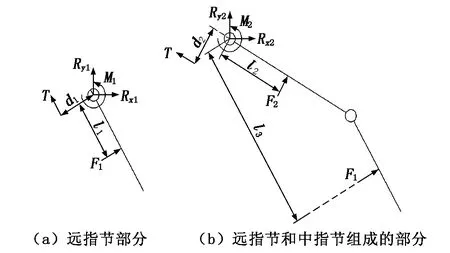
圖3 所取分離體的受力分析
圖3中,Mi為各柔性鉸鏈的阻力矩,Rxi、Ryi為各關(guān)節(jié)處柔性鉸鏈在x向和y向的支反力,T、di分別為SMA絲驅(qū)動手指各指節(jié)的張力及其力臂,F(xiàn)i、li分別為各指節(jié)承受的壓力及其力臂。分別列圖3(a)、圖3(b)的力矩平衡方程:
Td1-F1l1-M1=0.
(3)
Td2-F1l3-F2l2-M2=0.
(4)
由表1得到F1、F2、l1、l2,l3由幾何關(guān)系確定為31.7 mm,關(guān)節(jié)的阻力矩也由表1中的轉(zhuǎn)角計算:
Mi=Kθi.
(5)
其中:K為轉(zhuǎn)動剛度,由材料和柔性鉸鏈的尺寸決定,在本設(shè)計中取為0.5 Nmm/(°)。
由式(3)~式(5)解得d1、d2的值分別為1.24 mm、4.06 mm。近指節(jié)的驅(qū)動力臂d3對握手時的握力幾乎無影響,但對于欠驅(qū)動手指結(jié)構(gòu),三個指節(jié)的驅(qū)動力臂之間的大小關(guān)系會影響它們的動作響應(yīng)順序。一般人手自然彎曲時,中指節(jié)響應(yīng)最快,遠指節(jié)、近指節(jié)依次次之。故d3應(yīng)小于d2,略大于d1,本例取2 mm。故經(jīng)適當圓整后中指各指節(jié)驅(qū)動力臂的數(shù)值如表2所示。

表2 中指各指節(jié)的驅(qū)動力臂
2.3 SMA絲收縮量與關(guān)節(jié)轉(zhuǎn)角的關(guān)系
因SMA絲收縮率有限,因此有必要推導(dǎo)其收縮量ΔL與各指節(jié)轉(zhuǎn)角θ之間的函數(shù)關(guān)系,以確定軟手指的結(jié)構(gòu)設(shè)計參數(shù)。
經(jīng)過軟手指的受力分析,得到了各指節(jié)所需的驅(qū)動力臂d,只要確定SMA絲在軟手指基體內(nèi)的布置位置,就可以根據(jù)關(guān)節(jié)轉(zhuǎn)角θ的目標值計算所需的SMA絲收縮量ΔL。軟手指關(guān)節(jié)發(fā)生轉(zhuǎn)動后的狀態(tài)如圖4所示。
圖4中,點O為轉(zhuǎn)動中心,點A和點B為SMA絲經(jīng)過的結(jié)點,線段AB到點O的距離為驅(qū)動力臂d,關(guān)節(jié)未發(fā)生轉(zhuǎn)動時線段OA與線段OB的夾角為θn。當某個指節(jié)繞轉(zhuǎn)動中心轉(zhuǎn)過一個角度θ后,關(guān)節(jié)結(jié)點A、B間的SMA絲長度減小,結(jié)點和轉(zhuǎn)動中心的距離x保持不變。對AOB構(gòu)成的三角形應(yīng)用余弦定理,分別計算轉(zhuǎn)動前和轉(zhuǎn)動后A、B結(jié)點間的距離,兩者的差值即所需的SMA絲收縮量:
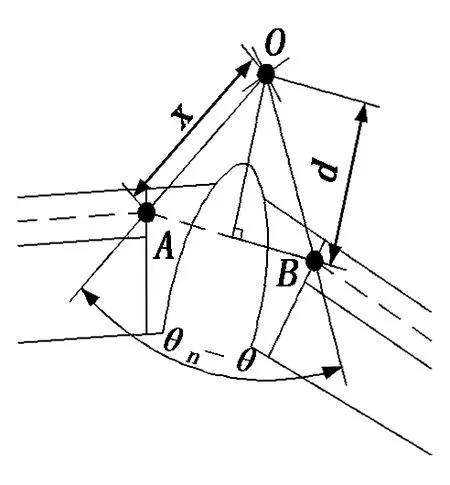
圖4 軟手指關(guān)節(jié)發(fā)生轉(zhuǎn)動后的狀態(tài)
(6)
由幾何關(guān)系知θn與x滿足關(guān)系:
x=d/cos[(θn-θ)/2].
(7)
因此,確定了結(jié)點夾角θn后,將表1和表2中的數(shù)據(jù)代入到式(7),即可確定結(jié)點距離x的取值。
2.4 軟手指的最優(yōu)結(jié)構(gòu)參數(shù)
以關(guān)節(jié)轉(zhuǎn)動時所需的最小SMA絲收縮量為優(yōu)化目標,確定結(jié)點夾角θn的值。以中指節(jié)為例,利用MATLAB軟件,由式(6)、式(7)得到結(jié)點夾角θn、關(guān)節(jié)轉(zhuǎn)角θ和所需SMA絲收縮量ΔL關(guān)系的仿真結(jié)果,如圖5所示。
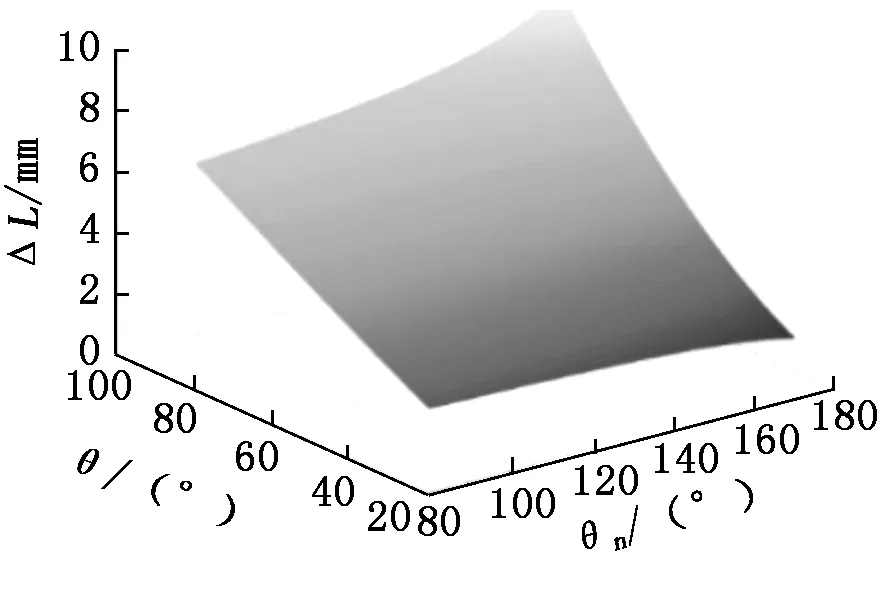
圖5 結(jié)點夾角θn、關(guān)節(jié)轉(zhuǎn)角θ與收縮量ΔL的關(guān)系
從圖5可以看出:當指節(jié)轉(zhuǎn)角θ在60°附近時,取不同的結(jié)點夾角θn對所需SMA絲的收縮量ΔL幾乎沒有影響;在此臨界轉(zhuǎn)角以下時,ΔL隨θn的增大而減小;在此臨界轉(zhuǎn)角以上時,ΔL隨θn的增大而增大。事實上,臨界轉(zhuǎn)角的大小與表1中的轉(zhuǎn)角θ和表2中的驅(qū)動力臂d有關(guān)。
此外,在關(guān)節(jié)未發(fā)生轉(zhuǎn)動時,將θ的零值代入式(7),可知SMA絲驅(qū)動器的驅(qū)動力初始力臂d0與結(jié)點距離x、結(jié)點夾角θn滿足如下關(guān)系:
d0=xcos(θn/2).
(8)
對于結(jié)點夾角θn,由于手指在握手時各指節(jié)的轉(zhuǎn)角θ均小于臨界轉(zhuǎn)角,應(yīng)對θn取盡可能大的值,由式(8)可知這意味著對初始力臂d0取盡可能小的值。但若d0太小,會出現(xiàn)驅(qū)動時不穩(wěn)定的狀況,因此限制d0的最小值為1 mm。結(jié)合表1、表2的數(shù)據(jù)和式(7)、式(8)可確定遠指節(jié)、中指節(jié)的結(jié)點夾角θn。對于近指節(jié),因握手時其轉(zhuǎn)角θ為0,故初始力臂d0即為表2中的驅(qū)動力臂d。對于結(jié)點夾角θn,因其對握手時所需的SMA絲收縮量ΔL無影響,故無嚴格要求,可根據(jù)工藝要求靈活調(diào)整,在本例中取130°。最終,確定的中指各指節(jié)結(jié)構(gòu)參數(shù)如表3所示。

表3 中指各指節(jié)的最優(yōu)結(jié)構(gòu)參數(shù)
3 樣機制備
軟手指的骨骼通過3D打印直接成型,材料為聚乳酸(PLA)。柔性皮膚選用的材料為德國瓦克公司的M4601硅膠。通過3D打印制作硅膠鑄造用的模具,并將手指骨骼安裝于模具中,再布置兩組型芯(材料為304不銹鋼)用于成型手指內(nèi)部的孔道,圖6為模具裝配截面圖。將M4601雙組份液流硅膠混合,從澆道孔注入模具,待其固化后可實現(xiàn)軟手指的一體成型。
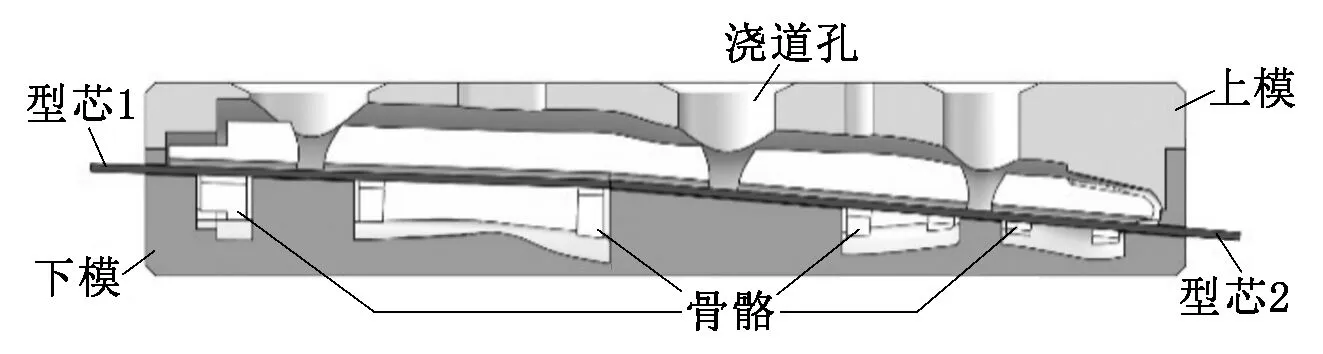
圖6 軟手指的模具裝配截面圖
將五根軟手指安裝到3D打印的手掌機殼上,內(nèi)部安裝了一塊驅(qū)動電路板,見圖7(a),由外部信號控制板內(nèi)的MOS管放大電路,調(diào)節(jié)通過每根SMA絲的電流,從而實現(xiàn)對軟手指的控制。最終的仿人手樣機如圖7(b)所示,其大小與人手尺寸相當,可以套進硅膠手套,提高仿人手的逼真度。
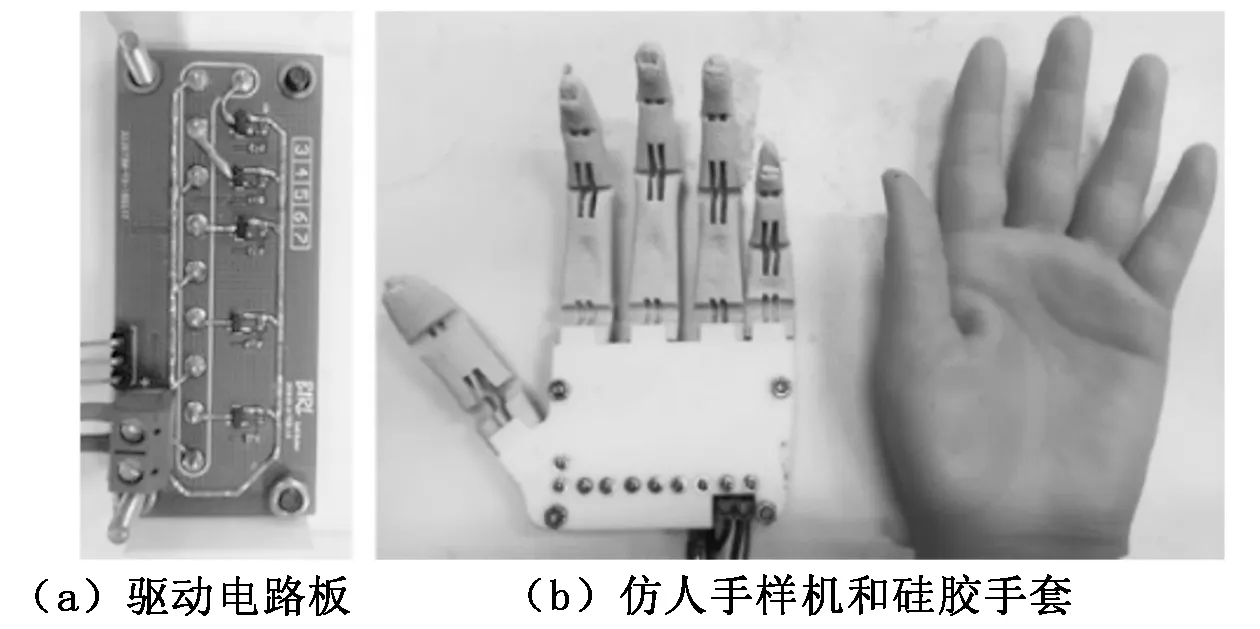
圖7 驅(qū)動電路板與仿人手樣機和硅膠手套
4 實驗驗證
4.1 單根手指的實驗驗證
為了驗證驅(qū)動模型的準確性,以中指為例,開展其姿態(tài)控制實驗。通過GPS-4303C直流穩(wěn)壓電源逐步增大SMA絲的通電電流,手指逐步彎曲,當電流達到1 A時,SMA絲完全收縮,手指達到最大彎曲變形,如圖8所示。
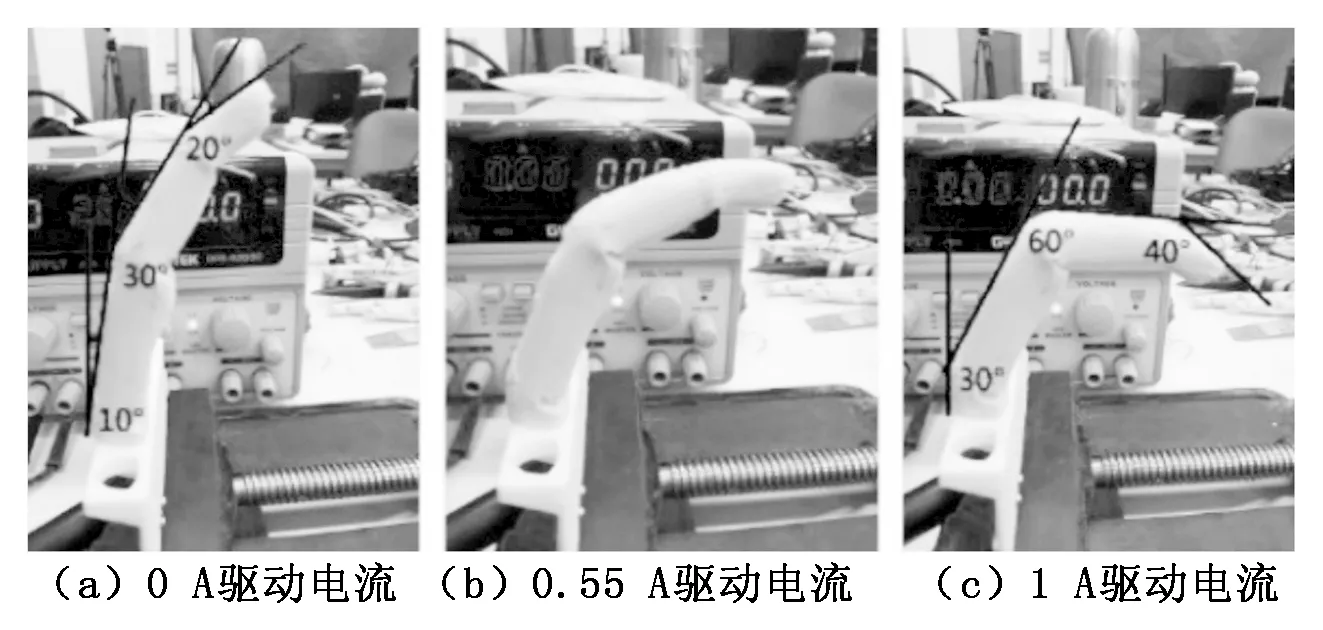
圖8 驅(qū)動電流分別為0 A、0.55 A、1 A時的手指狀態(tài)
在未通電時,對手指的SMA絲進行了預(yù)拉伸,遠、中、近指節(jié)的轉(zhuǎn)角分別為20°、30°、10°,將表3的數(shù)據(jù)代入式(6)、式(8)計算得總收縮量ΔL1為2.1 mm;在手指完全彎曲后,遠、中、近指節(jié)的轉(zhuǎn)角分別為40°、60°、30°,計算得總收縮量ΔL2為6.4 mm。兩者的差值為4.3 mm,即為SMA絲驅(qū)動器輸出的行程。該值與2.1節(jié)計算的理論最大行程5.2 mm相近,說明所推導(dǎo)的驅(qū)動模型是合理的。分析誤差來源,主要來自于制造誤差、環(huán)境對SMA絲特性的影響、模型對柔性鉸鏈轉(zhuǎn)動中心的近似處理等。
4.2 仿人手樣機的實驗測試
通過STM32控制器向仿人手樣機輸入控制信號,可以實現(xiàn)對每根手指的單獨控制。通過控制特定手指的彎曲,可以實現(xiàn)簡單的手勢展示,見圖9(a)。圖9(b)為柔性仿人手樣機與人握手的效果,實驗者可以得到與真人握手的相似感受,進一步驗證了驅(qū)動模型的準確性。
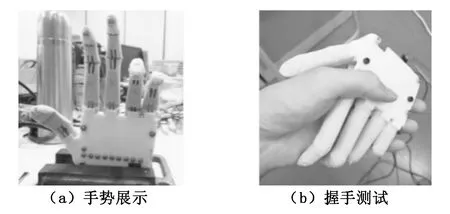
圖9 手勢展示與握手測試
5 結(jié)語
介紹了一種由SMA絲驅(qū)動的新型柔性仿人手,其軟手指具有硬骨骼和軟皮膚的仿生結(jié)構(gòu),可直接一體成型,相比于其他柔性仿人手不僅整體結(jié)構(gòu)簡單、緊湊,而且具有良好的逼真度。提出了針對該軟手指的SMA驅(qū)動模型,并對軟手指的結(jié)構(gòu)參數(shù)進行了優(yōu)化設(shè)計。制作了仿人手樣機,通過實驗檢測了手指的彎曲角度并測試了與人握手的效果,驗證了驅(qū)動模型的準確性,并展示了該柔性仿人手應(yīng)用于仿人服務(wù)型機器人的優(yōu)勢。
