基于模糊PID 的桑蠶養(yǎng)殖物聯(lián)網(wǎng)管理系統(tǒng)設(shè)計(jì)
2021-08-02 07:40:32吳亙杰王成群寇東來(lái)
軟件導(dǎo)刊 2021年7期
關(guān)鍵詞:系統(tǒng)
吳亙杰,王成群,李 亮,寇東來(lái)
(1.浙江理工大學(xué)信息學(xué)院,浙江 杭州 310018;2.浙江海利普電子科技有限公司,浙江嘉興 314300)
0 引言
長(zhǎng)期以來(lái),我國(guó)桑蠶養(yǎng)殖主要以人工養(yǎng)殖為主,蠶房的溫濕度環(huán)境極大程度上取決于農(nóng)戶自身經(jīng)驗(yàn),存在著勞動(dòng)力成本高、效率低、管理水平差異大、專業(yè)知識(shí)水平要求高等一系列問(wèn)題。在控制系統(tǒng)中,絕大多數(shù)控制對(duì)象不同程度上存在時(shí)滯性,而在溫度控制系統(tǒng)中時(shí)滯現(xiàn)象更為常見(jiàn),大時(shí)滯一直是控制系統(tǒng)需要處理的重大難題[1]。溫濕度變化對(duì)桑蠶生長(zhǎng)影響極大,大空間蠶房的時(shí)滯問(wèn)題更為突出。由于桑蠶養(yǎng)殖占地面積廣,所處環(huán)境較復(fù)雜,再加上南方氣候變幻無(wú)常,因此蠶房環(huán)境是一個(gè)大滯后、大慣性、非線性、時(shí)變性的被控對(duì)象,時(shí)滯問(wèn)題難以避免,很難建立一個(gè)準(zhǔn)確的數(shù)學(xué)模型[2]。模糊控制適用于非線性及多干擾系統(tǒng),對(duì)沒(méi)有精確數(shù)學(xué)模型的系統(tǒng)可以達(dá)到較為優(yōu)秀的控制效果[3-4]。
很多學(xué)者針對(duì)大時(shí)滯溫度控制系統(tǒng)相關(guān)問(wèn)題進(jìn)行了研究。盛平等[5]設(shè)計(jì)的基于模糊PID 控制器的葉菜溫室測(cè)控系統(tǒng),將模糊PID 控制應(yīng)用于實(shí)際葉菜溫室場(chǎng)景中,提高了系統(tǒng)的自適應(yīng)性和靈活性;魏雨飛[6]設(shè)計(jì)的農(nóng)作物溫室溫度控制系統(tǒng),將模糊PID 思想應(yīng)用于大時(shí)滯溫控系統(tǒng)中,但在仿真實(shí)驗(yàn)中沒(méi)有建立數(shù)學(xué)模型;Wu 等[7]設(shè)計(jì)的基于自適應(yīng)模糊PID 的環(huán)境實(shí)驗(yàn)室溫度控制系統(tǒng)和趙慧敏等[8]設(shè)計(jì)的陽(yáng)光溫室控制系統(tǒng),都針對(duì)時(shí)滯問(wèn)題建立了數(shù)學(xué)模型,并進(jìn)行MATLAB 仿真驗(yàn)證,但是在實(shí)際環(huán)境中沒(méi)有測(cè)試驗(yàn)證;舒大松等[9]設(shè)計(jì)的自適應(yīng)模糊PID 倉(cāng)儲(chǔ)溫度控制系統(tǒng)采用了模糊PID 控制,但是隸屬度函數(shù)只采用了三角形,在模糊控制穩(wěn)定性方面有所欠缺;Najmurrokhman 等[10]根據(jù)平菇的最佳生長(zhǎng)環(huán)境需求設(shè)計(jì)了基于模糊PID 的平菇栽培溫濕度控制系統(tǒng),系統(tǒng)響應(yīng)快且控制效果良好。
針對(duì)蠶房溫濕度由于局部控制引起的時(shí)滯問(wèn)題,不論是單一的隸屬度函數(shù)還是傳統(tǒng)的PID 方法都存在一定的缺陷,本文提出一種綜合PID 控制和模糊控制兩者優(yōu)點(diǎn)的控制方案。該方案基于上位機(jī)專家數(shù)據(jù)庫(kù),下位機(jī)采集蠶房的溫濕度參數(shù)為輸入變量,以溫濕度控制量為輸出變量自適應(yīng)調(diào)節(jié)系數(shù),通過(guò)控制設(shè)備進(jìn)行相應(yīng)的溫濕度控制,以達(dá)到蠶房最優(yōu)化的控制效果,實(shí)現(xiàn)高效智能化管理。
1 總體方案
蠶房結(jié)構(gòu)如圖1 所示。實(shí)際蠶房空間約25m2,蠶房?jī)?nèi)熱風(fēng)機(jī)、加濕器和空調(diào)的安置位置決定了蠶房的溫濕度控制是由局部調(diào)節(jié)溫濕度來(lái)控制整體溫濕度變化,導(dǎo)致控制過(guò)程存在大時(shí)滯性和復(fù)雜性。
桑蠶養(yǎng)殖物聯(lián)網(wǎng)管理系統(tǒng)主要根據(jù)桑蠶的生長(zhǎng)階段,通過(guò)上位機(jī)專家數(shù)據(jù)庫(kù)查詢蠶房對(duì)應(yīng)的最佳溫濕度參考值來(lái)設(shè)定蠶房溫濕度。系統(tǒng)核心是嵌入式網(wǎng)關(guān),每間蠶房?jī)?nèi)安裝有4 個(gè)均勻分布的溫濕度檢測(cè)點(diǎn),網(wǎng)關(guān)通過(guò)RS485串口通信采集蠶房?jī)?nèi)溫濕度傳感器實(shí)時(shí)數(shù)據(jù),并將數(shù)據(jù)上傳至云服務(wù)器存儲(chǔ)到數(shù)據(jù)庫(kù)中,環(huán)境數(shù)據(jù)經(jīng)模糊控制器處理,根據(jù)實(shí)際情況和用戶設(shè)置自動(dòng)調(diào)控?zé)犸L(fēng)機(jī)、空調(diào)和加濕器等運(yùn)行時(shí)間。當(dāng)蠶房調(diào)控遇到?jīng)_突時(shí),溫度調(diào)控優(yōu)于濕度調(diào)控,以達(dá)到最優(yōu)的蠶房環(huán)境。
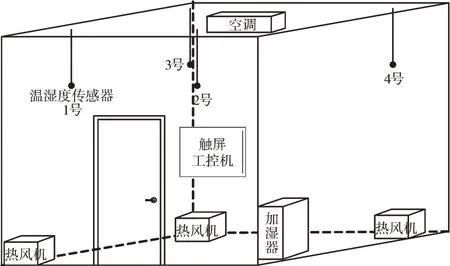
Fig.1 Schematic diagram of silkworm house圖1 蠶房結(jié)構(gòu)
對(duì)不同的系統(tǒng)功能域進(jìn)行拆分和優(yōu)化,形成桑蠶養(yǎng)殖物聯(lián)網(wǎng)管理系統(tǒng)體系架構(gòu),如圖2 所示。用戶域主要是桑蠶養(yǎng)殖管理人員;應(yīng)用域主要實(shí)現(xiàn)數(shù)據(jù)庫(kù)、上位機(jī)軟件以及智能處理平臺(tái)設(shè)計(jì),對(duì)來(lái)自下位機(jī)的數(shù)據(jù)進(jìn)行接收、存儲(chǔ)、分析和處理,實(shí)時(shí)響應(yīng)用戶的數(shù)據(jù)查詢和設(shè)備控制等需求,并將異常情況對(duì)用戶進(jìn)行反饋;運(yùn)維管控域主要實(shí)現(xiàn)可視化服務(wù)平臺(tái),保障系統(tǒng)的穩(wěn)定性以及對(duì)控制設(shè)備進(jìn)行維護(hù);感知域?qū)崿F(xiàn)蠶房?jī)?nèi)溫濕度采集、蠶房調(diào)控設(shè)備控制以及用于數(shù)據(jù)傳輸?shù)南挛粰C(jī)系統(tǒng)設(shè)計(jì)。下位機(jī)主要由感知終端、控制終端以及傳輸終端3 部分組成,桑蠶養(yǎng)殖管理人員可以通過(guò)觸屏工控機(jī)和移動(dòng)端對(duì)相應(yīng)蠶房進(jìn)行實(shí)時(shí)數(shù)據(jù)查詢、設(shè)備控制以及參數(shù)設(shè)定等;目標(biāo)對(duì)象域主要實(shí)現(xiàn)以蠶房為被控對(duì)象的桑蠶養(yǎng)殖物聯(lián)網(wǎng)管理系統(tǒng)控制平臺(tái)搭建。
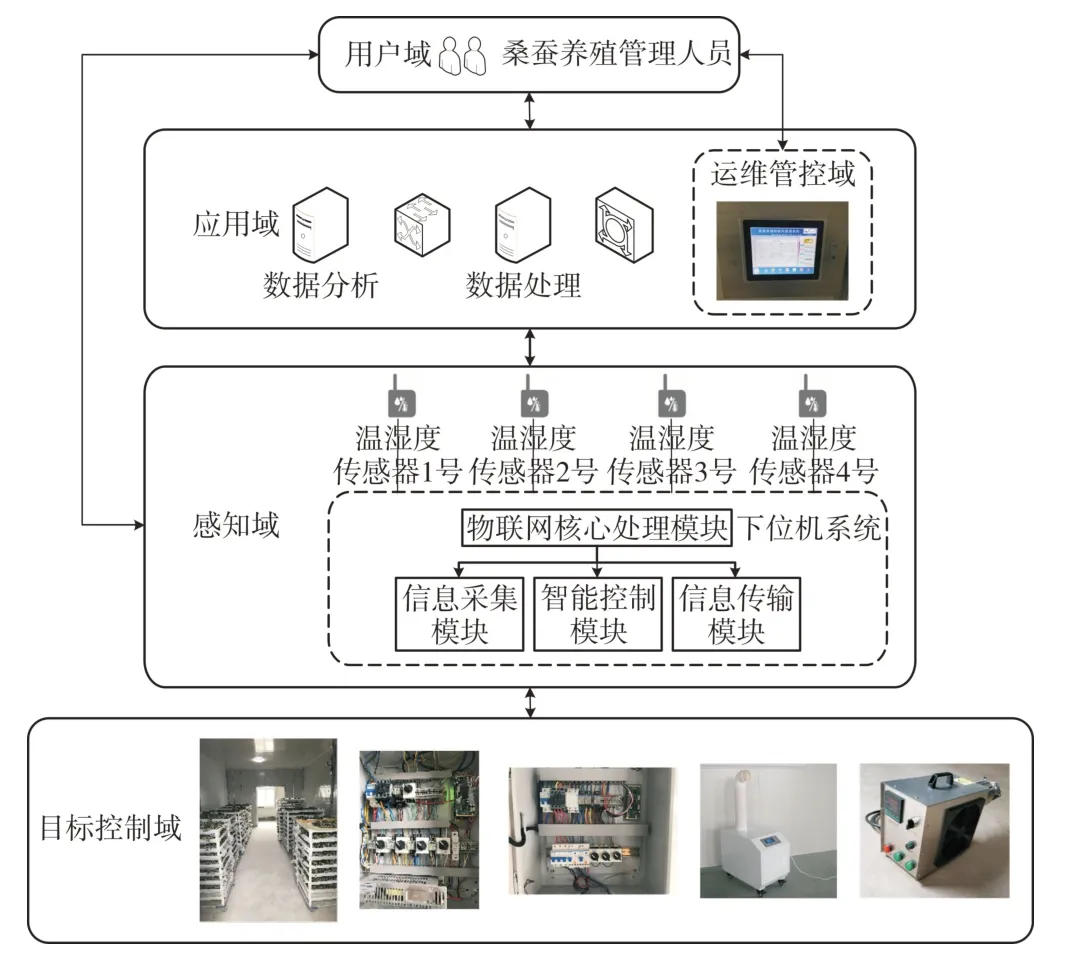
Fig.2 IoT system architecture diagram圖2 物聯(lián)網(wǎng)體系架構(gòu)
2 模糊PID 控制原理
PID 控制是一種基于過(guò)程參數(shù)的控制算法,利用反饋來(lái)檢測(cè)偏差信號(hào),并通過(guò)偏差信號(hào)控制被控量,而控制器本身就是比例、積分、微分3 個(gè)環(huán)節(jié)的加和[11]。本系統(tǒng)基于PID 控制算法結(jié)合模糊控制思想實(shí)現(xiàn)蠶房溫濕度的自適應(yīng)調(diào)節(jié),其控制表達(dá)如下:

式(1)中:u(t)為t 時(shí)刻系統(tǒng)輸出的控制量;Kp為比例系數(shù);Ki為積分系數(shù);Kd為微分系數(shù);控制器輸入e(t)為設(shè)定溫度值r(t)與蠶房溫度實(shí)際值y(t)之間的誤差,表示為e(t)=r(t)-y(t);偏差變化率ec(t)為當(dāng)前時(shí)刻偏差值與上一時(shí)刻偏差值之差,表示為ec(t)=e(t)-e(t-1)。
由于蠶房溫濕度控制具有時(shí)滯性和大慣性特點(diǎn),考慮到受控對(duì)象的多干擾性和桑蠶對(duì)溫濕度變化的敏感性,傳統(tǒng)的PID 方法無(wú)法滿足蠶房溫濕度的精確控制要求。為滿足不同階段桑蠶的最佳溫濕度需求,本系統(tǒng)結(jié)合模糊PID控制思想對(duì)傳統(tǒng)PID 算法進(jìn)行改進(jìn),設(shè)計(jì)PID 系數(shù)自適應(yīng)算法,利用農(nóng)戶以往成功的調(diào)節(jié)實(shí)踐經(jīng)驗(yàn)建立專家數(shù)據(jù)庫(kù),充分發(fā)揮模糊PID 控制器的優(yōu)良控制效果。圖3 是系統(tǒng)的模糊PID 控制結(jié)構(gòu)。
系統(tǒng)以上位機(jī)專家數(shù)據(jù)庫(kù)中的溫度為依據(jù),將蠶房采集到的溫度偏差e 和溫度偏差變化率ec作為模糊控制器輸入,在模糊量化處理基礎(chǔ)上結(jié)合模糊控制規(guī)則進(jìn)行模糊推理,得出3 個(gè)參數(shù)的模糊度,最后對(duì)照模糊論域進(jìn)行清晰化處理得出具體數(shù)值。模糊控制器的輸出為PID 控制器參數(shù)變化量△Kp,△Ki,△Kd,可以根據(jù)蠶房實(shí)際狀態(tài)對(duì)系統(tǒng)PID原來(lái)設(shè)計(jì)的初始參數(shù)進(jìn)行修正[12-14],計(jì)算出控制蠶房相關(guān)執(zhí)行器的變量,由變量推導(dǎo)出控制組合。
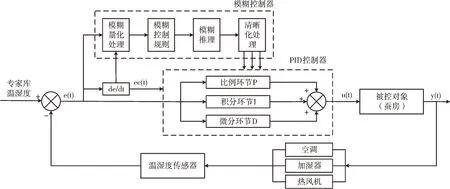
Fig.3 Fuzzy PID control structure diagram圖3 模糊PID 控制結(jié)構(gòu)
綜合分析蠶桑養(yǎng)殖物聯(lián)網(wǎng)管理系統(tǒng)后,得出溫度偏差e 的論域?yàn)椋?3,3],溫度偏差變化率ec的論域?yàn)椋?3,3]。采用“PB(正大)”“PM(正中)”“PS(正小)”“ZO(零)”“NS(負(fù)小)”“NM(負(fù)中)”“NB(負(fù)大)”7 個(gè)模糊子集涵蓋蠶房?jī)?nèi)溫度偏差e 和溫度偏差變化率ec。根據(jù)實(shí)際經(jīng)驗(yàn)并考慮控制的穩(wěn)定性需求,本文選用三角形隸屬度函數(shù),NB 和PB選用Z 型和S 型隸屬函數(shù),如圖4 所示。
根據(jù)系統(tǒng)模糊控制輸入量溫度偏差e 和溫度偏差變化率ec特點(diǎn),在桑蠶養(yǎng)殖理論知識(shí)和實(shí)踐經(jīng)驗(yàn)基礎(chǔ)上建立PID 參數(shù)調(diào)整規(guī)則表,如表1 所示。當(dāng)偏差e 絕對(duì)值較小時(shí),選擇較大的Kp和Ki來(lái)保證系統(tǒng)穩(wěn)定性,選擇適當(dāng)?shù)腒d提高系統(tǒng)的抗干擾能力;當(dāng)偏差e 絕對(duì)值中等時(shí),選擇較小的Kp和適當(dāng)?shù)腒i,Kd,通過(guò)降低超調(diào)量來(lái)保證系統(tǒng)的響應(yīng)速率;當(dāng)偏差e 絕對(duì)值較大時(shí),選擇較大的Kp保證蠶房響應(yīng)效果,選擇較小的Kd來(lái)避免出現(xiàn)過(guò)飽和現(xiàn)象。同時(shí)為了避免系統(tǒng)超調(diào),對(duì)積分作用部分進(jìn)行限制[15-16]。模糊規(guī)則采用“if A and B then C”的條件語(yǔ)句實(shí)現(xiàn)。
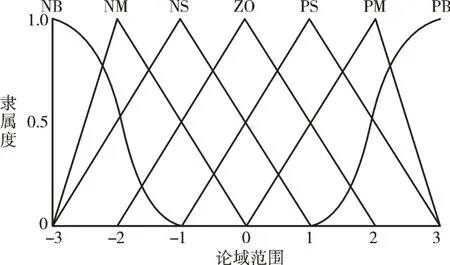
Fig.4 Membership function圖4 隸屬度函數(shù)
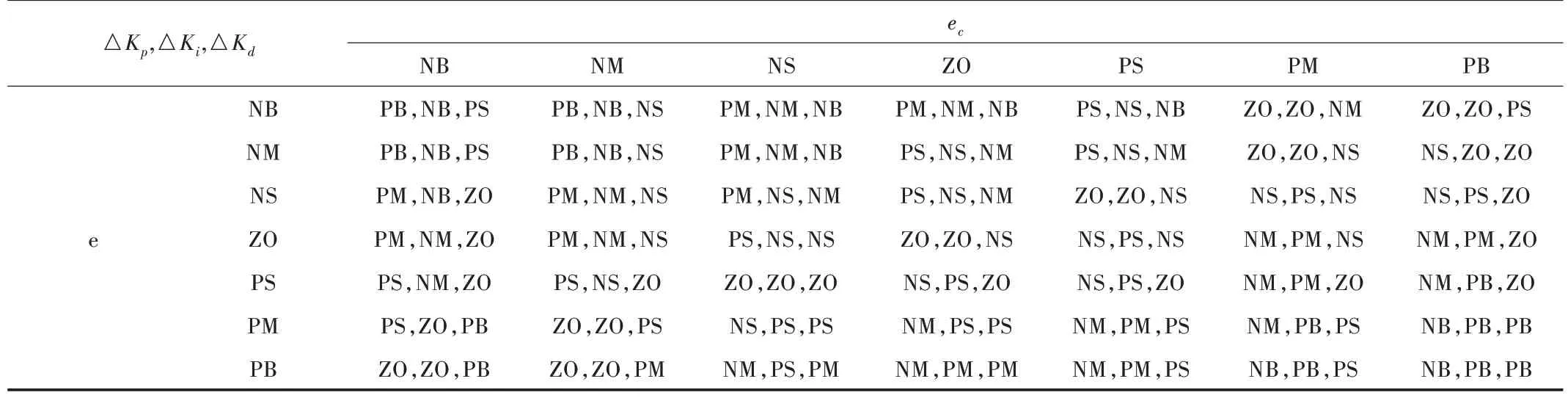
Table 1 Fuzzy control rule表1 模糊控制規(guī)則
由于蠶桑養(yǎng)殖物聯(lián)網(wǎng)管理系統(tǒng)的被控對(duì)象蠶房具有時(shí)滯性和大慣性等特性,系統(tǒng)近似于一階慣性純滯后模型,其傳遞函數(shù)可以用一階慣性環(huán)節(jié)與純延遲環(huán)節(jié)的串聯(lián)形式進(jìn)行描述[17]。可表示為:

式(2)中,K 為蠶房的靜態(tài)增益系數(shù),即系統(tǒng)達(dá)到穩(wěn)態(tài)時(shí)系統(tǒng)輸出與系統(tǒng)輸入的比值,它只與被控對(duì)象有關(guān),是表示被控對(duì)象穩(wěn)定的標(biāo)志。K 值越大穩(wěn)定性越差,K 值越小穩(wěn)定性越好。T 為蠶房的慣性時(shí)間常數(shù),反映了加入輸入信號(hào)后輸出變量從初始狀態(tài)到穩(wěn)態(tài)的變化程度和被控對(duì)象動(dòng)態(tài)過(guò)程的快慢特性。τ為蠶房的時(shí)滯時(shí)間系數(shù)。
采用飛升曲線測(cè)量法[18]確定控制對(duì)象的數(shù)學(xué)模型,將測(cè)得的蠶房溫度時(shí)間數(shù)據(jù)擬合得到系統(tǒng)開環(huán)響應(yīng)曲線。在曲線變化最快處作切線,求得與時(shí)間軸交點(diǎn)以及與漸近線交點(diǎn),得出系統(tǒng)慣性時(shí)間常數(shù)T 為290s,滯后時(shí)間τ為20s。根據(jù)熱風(fēng)機(jī)和控制溫度之間的對(duì)應(yīng)關(guān)系進(jìn)行參數(shù)識(shí)別,可以得到系統(tǒng)靜態(tài)增益系數(shù)K 為0.7。
最終系統(tǒng)傳遞函數(shù)為:

3 結(jié)果評(píng)估
蠶房?jī)?nèi)溫度調(diào)節(jié)為大時(shí)滯系統(tǒng),本文對(duì)文中所提出的溫濕度控制模型進(jìn)行仿真,仿真實(shí)驗(yàn)基于MATLAB/Simu?link 平臺(tái),將常規(guī)PID 控制與模糊自適應(yīng)PID 控制算法進(jìn)行對(duì)比。實(shí)驗(yàn)包括時(shí)滯環(huán)節(jié)的仿真,初始溫度20℃,設(shè)定控制溫度為25℃,仿真結(jié)果如圖5 所示。圖5 仿真實(shí)驗(yàn)表明,常規(guī)PID 算法和模糊自適應(yīng)PID 控制算法都能實(shí)現(xiàn)溫度控制,但模糊自適應(yīng)PID 控制算法在系統(tǒng)控制性能上明顯優(yōu)于常規(guī)PID 算法。模糊PID 控制算法不僅響應(yīng)速率更快,超調(diào)量更小,可靠性和穩(wěn)定性更強(qiáng),而且可以實(shí)現(xiàn)PID 參數(shù)的最優(yōu)調(diào)整,更好地處理蠶房因不確定環(huán)境參數(shù)變化帶來(lái)的影響。
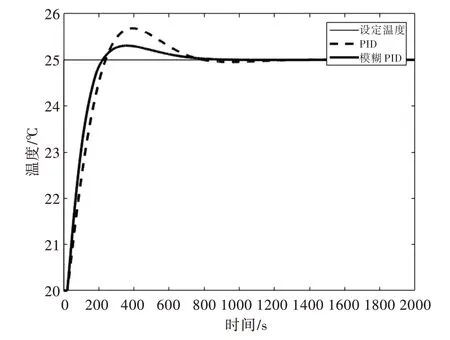
Fig.5 Comparison of simulation results between fuzzy PID and conventional PID圖5 模糊PID 與常規(guī)PID 仿真效果對(duì)比
為了驗(yàn)證蠶桑養(yǎng)殖物聯(lián)網(wǎng)管理系統(tǒng)運(yùn)行效果,隨機(jī)對(duì)某天的一間蠶房進(jìn)行現(xiàn)場(chǎng)測(cè)試,設(shè)定蠶房溫度值為25℃,溫度誤差為±1℃,濕度值為85%RH,濕度誤差為±5%,測(cè)試時(shí)間為9:00-16:00,數(shù)據(jù)采集間隔為30min,得到的實(shí)驗(yàn)結(jié)果與預(yù)期相符,蠶房實(shí)際溫濕度控制情況如圖6、圖7 所示。由圖6、圖7 可知,在設(shè)定溫度和濕度及誤差后,蠶房?jī)?nèi)溫度和濕度在不同時(shí)間段會(huì)有所起伏,溫度始終保持在24~26℃范圍內(nèi),濕度始終保持在80%~90%RH 范圍內(nèi)。數(shù)據(jù)顯示系統(tǒng)運(yùn)行正常且響應(yīng)及時(shí),沒(méi)有出現(xiàn)超出設(shè)定范圍的報(bào)警,實(shí)現(xiàn)了蠶房溫濕度的自適應(yīng)控制。
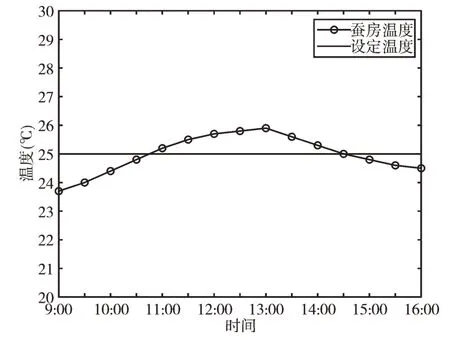
Fig.6 Temperature change graph圖6 蠶房溫度變化曲線
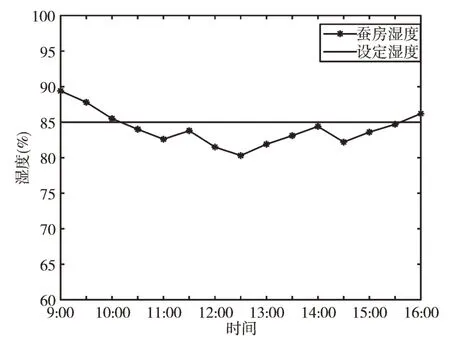
Fig.7 Humidity change graph圖7 蠶房濕度變化曲線
4 結(jié)語(yǔ)
針對(duì)蠶房溫濕度控制存在的大滯后、大慣性、非線性、時(shí)變性等問(wèn)題,研究蠶房?jī)?nèi)溫濕度變化規(guī)律,設(shè)計(jì)了一種根據(jù)蠶房環(huán)境因素變化有效調(diào)整的模糊控制方法。長(zhǎng)期實(shí)地測(cè)試和觀察表明,本文設(shè)計(jì)的蠶桑養(yǎng)殖物聯(lián)網(wǎng)管理系統(tǒng)具有實(shí)用性和可靠性,具有良好穩(wěn)定的控制效果和很強(qiáng)的魯棒性,可以及時(shí)處理因人工或環(huán)境因素對(duì)桑蠶養(yǎng)殖造成的不利影響,彌補(bǔ)了常規(guī)PID 溫度控制系統(tǒng)在高控制要求和多干擾情況下魯棒性不足問(wèn)題。蠶桑養(yǎng)殖物聯(lián)網(wǎng)管理系統(tǒng)可以達(dá)到傳統(tǒng)人工養(yǎng)殖效果,極大程度上降低勞動(dòng)力成本,滿足農(nóng)戶智能化監(jiān)測(cè)和管理需求,具有較好的實(shí)用性和應(yīng)用價(jià)值。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
