直流發電機的控制策略
2021-08-04 08:17:30趙小平
能源與環保 2021年7期
趙小平
(神木職業技術學院,陜西 神木 719300)
在直流微網中,太陽能光伏Boost變換器并不具備發電機慣性與阻尼,而且負載功率發生驟變時還會影響直流母線電壓的穩定性。若母線電壓出現擾動,那么保障負荷側電壓穩定、母線電壓恢復、降低電壓跌落沖擊便成為了直流微網穩定運行的關鍵。作為母線、負荷、微電源銜接的關鍵電力電子設備,DC/DC變換器可轉變母線電壓或者微電源電壓為負荷或者直流母線可接受電壓等級。為保障直流微網運行穩定性,有學者提出了以電壓下垂控制與MPPT控制為載體的光伏接口單元控制與抑制母線電壓波動的功率前饋控制相關策略,可確保母線電壓穩定性,卻無法控制小范圍直流母線電壓的波動與突變。當前基于直流母線的變流器控制策略依舊缺少一定的柔韌性與自動分擔功率效用,所以進一步研究具備魯棒性的DC/DC變換器控制模型具有十分重要的現實意義[1]。據此,本文提出了虛擬直流發電機控制策略,即基于模擬直流發電機特性的DC/DC變換器控制策略。
1 直流發電機工作原理
基于直流發電機原理[2]可以得知:
Ee=Fgφυ
(1)
式中,Ee為感應電動勢;Fg為電動勢常數;φ為磁通;υ為轉速。
若發電機輸出電壓以R0表示,內阻以f表示,輸出電流以Io表示,負載阻抗以UL表示,那么直流發電機運行電路如圖1所示。
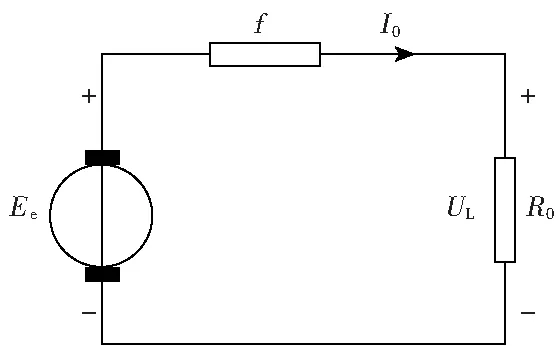
圖1 直流發電機運行電路
由圖可知,直流發電機輸出電流具體表示為:
(2)
基于式(2)可知,輸出電流直接受發電機的感應電動勢、內阻、負載阻抗影響。就發電機供電系統而言,內阻屬于既定值,負載阻抗則以供電系統工況不同而阻值相對不同,因此為了有效控制輸出電流,需適度調整感應電動勢。而感應電動勢與電動勢、磁通、轉速息息相關,電動勢屬于常數,因此通常以調節磁通或轉速的方式進行感應電動勢調整。
磁通與勵磁電流之間關系[3]具體表示為:
φ=HaIa
(3)
式中,Ia為勵磁電流;Ha為比例常數。
將式(3)代入式(1)則得出:
Ee=FgHaIaυ
(4)
將式(4)代入式(2)則得出:
(5)
由上述公式得知,直流發電機的輸出電流與發電機參數(電動勢、內阻等)密切關聯,且直接受勵磁電流、發電機轉速、輸出電壓影響。基于轉速與輸出電壓既定時,可以適度改變勵磁電流的方式,進行輸出電流調整。
2 直流發電機慣性特性分析
直流發電機負荷為電阻,那么輸入輸出回路[4]如圖2所示,其中Wn為機械轉矩;Ee為感應電動勢;Fa為總電阻;Io為輸出電流;Ro為輸出電壓;UL為負載阻抗。
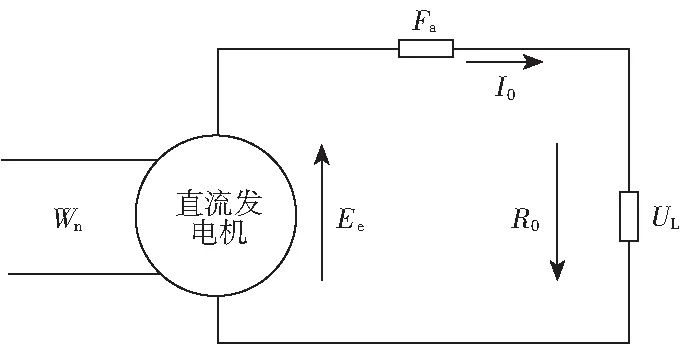
圖2 輸入輸出回路
直流微網內,
(6)
式中,We為電磁轉矩;J為轉動慣量;P為阻尼系數;υ為角速度;υ0為角速度初始值。
基于式(6),在直流發電機機械功率驟然改變時,受轉動慣量與阻尼系數影響,發電機角速度逐步變化,此時感應電動勢與輸出功率則呈現為平穩變化狀態。
在直流發電機輸入功率突發性升高時,輸入機械功率與輸出電磁功率的變化如圖3所示,Qc為輸入機械功率;Qd為輸出電磁功率。
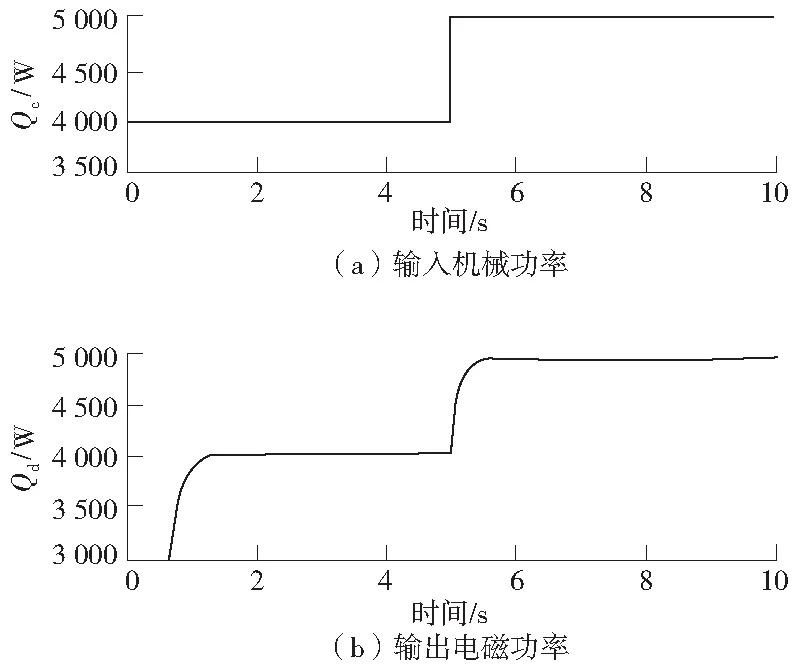
圖3 輸入機械功率與輸出電磁功率變化
由圖3可知,直流發電機輸入功率階躍迅速升高時,輸出功率并未隨之呈現相同變化趨勢,而是通過慣性緩緩升高,其為直流發電機的一大主要優勢。
3 直流發電機控制策略
本文選用了當前應用比較廣泛且先進的虛擬直流發電機控制策略,即以既定控制策略,對變換器輸入輸出加以控制,促使其具備直流發電機特性。此控制策略數學模型則是基于發電機機械與電磁方程得以構建的。虛擬直流發電機控制策略模型主要包含3大模塊。
3.1 直流發電機模塊分析
直流發電機模塊結構[5]如圖4所示。
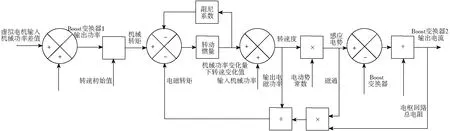
圖4 直流發電機模塊結構示意
3.2 直流電壓調節模塊分析
此模塊不可利用母線電壓,主要是由于直流微網以分層加以控制,母線電壓變化比較明顯。所以以Boost變換器中間電壓為載體,其模塊結構[6]如圖5所示。
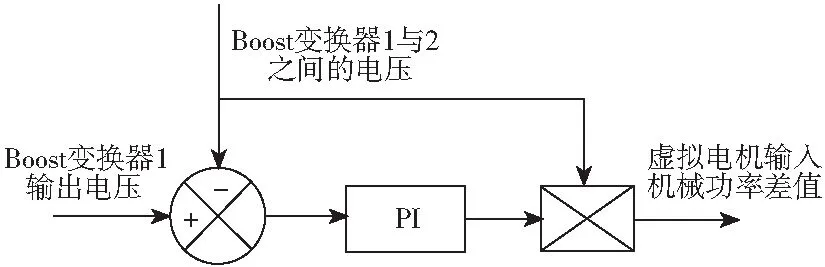
圖5 直流電壓調節模塊結構
3.3 電流跟蹤控制模塊分析
電流跟蹤模塊結構因微電源不同類型而存在差異,即如果太陽能光伏系統輸出電流與參考值在PI調節之后為O,則電壓源類型模塊占空比則為O,電流源類型模塊占空比為1-O。通過仿真分析得出電流跟蹤模塊結構[7]如圖6所示。
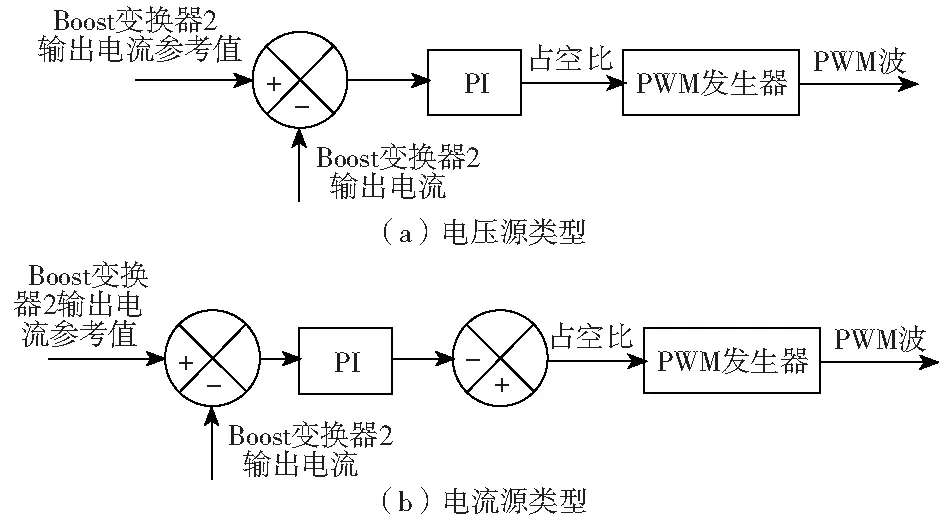
圖6 直流跟蹤控制模塊結構示意
太陽能光伏電池屬于受端電壓直接影響的電流源,所以本文設計的虛擬發電機電流跟蹤模塊選擇電流源類型模型結構。
4 仿真分析
以Pscad/Emtdc仿真對控制策略進行實驗分析[8]。在初始運行時,直流母線電壓穩定運行在額定狀態,即400 V,1 s之后母線受擾動發生了短時間電壓驟降。基于擾動的母線電壓與電樞端電壓如圖7所示。
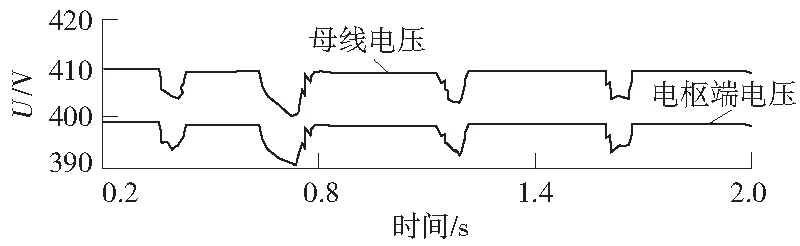
圖7 基于擾動影響的母線電壓與電樞端電壓
由圖7可以看出,受擾動影響,直流發電機母線電壓較低的狀態下,直流變換器的虛擬電樞電動勢隨著母線變化相對變化,以此縮減面向母線的功率取用,從而助于母線電壓快速恢復。
于相同工況下,基于PI控制與虛擬直流發電機控制加強Boost電路控制。初始運行時,母線電壓于400 V平穩運行1 s時,系統持續添加負荷,以造成直流母線電壓實時變化。仿真參數設置具體為:串聯電感1.1 mH,輸出濾波電容3.4 mF,負荷100 Ω,2組50 Ω并聯運行,時間控制在2 s,步長250 μs,初始時為一組負荷供電,1 s時為2組負荷并聯供電。
基于PI控制的Boost變換器的母線電壓與負荷電流具體如圖8所示。
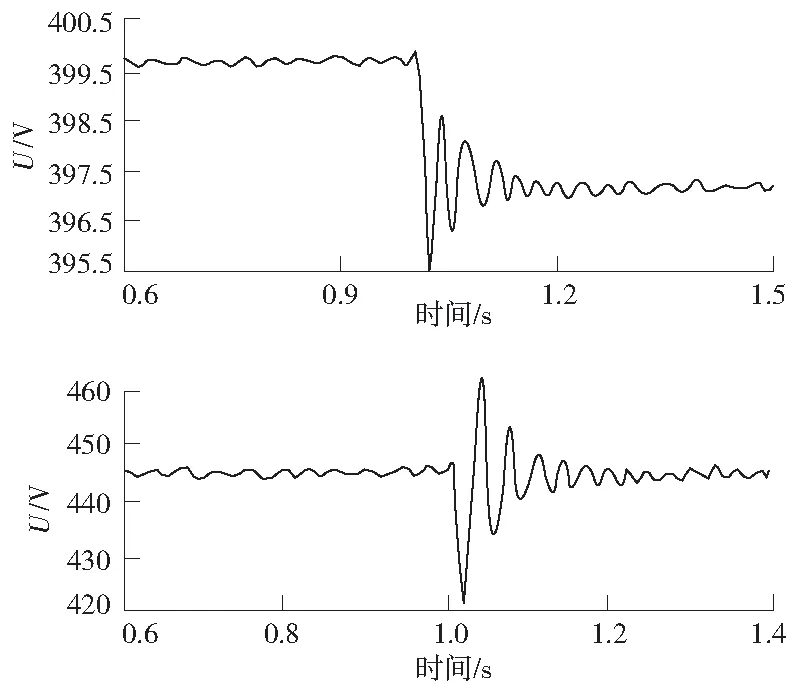
圖8 基于PI控制的微網母線電壓與負荷側電壓
由圖8可知,在負荷功率實時變化時,在擾動影響作用下,母線電壓于PI控制則會生成回復趨勢,最終于397 V穩定,且只出現小范圍電壓波動,而負荷側電壓于450 V穩定,PI控制法盡管可保持負荷側電壓均衡,但是電壓變化依舊非常突兀且明顯。
基于虛擬直流發電機控制的Boost變換器的母線電壓與負荷電流如圖9所示。

圖9 微網母線電壓與負荷側電壓
由圖9可知,在母線電壓突然下降時,Boost變換器于虛擬直流發電機控制,會適度降低對于母線電壓功率的獲取,所以也可保持母線電壓處于397 V穩定狀態。而與PI控制相比,其還添加了慣性環節,在電壓恢復時會基于適度緩解震蕩,避免對母線其他設備造成巨大沖擊,而負荷側電壓也會通過震蕩恢復為原始狀態。所以,相對于PI控制,虛擬直流發電機控制策略超調性與可行性更為突出,值得大力推廣應用。
5 結論
綜上所述,在直流微網中母線電壓擾動時,需以直流變換器保障負荷側電壓不受干擾,并恢復母線電壓,降低電壓跌落造成的沖擊。據此,本文提出了虛擬直流發電機控制策略,其屬于具備魯棒性與柔韌性的直流變換器控制方案,可緩解負荷變化造成的母線電壓波動,還可逐步恢復電壓于額定值。同時,通過仿真分析表明,虛擬直流發電機控制策略超調性與可行性非常突出,值得大力推廣應用。
猜你喜歡
故事作文·高年級(2021年12期)2021-12-21 02:32:35
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
大電機技術(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
智能建筑電氣技術(2015年5期)2015-12-10 05:52:30
電測與儀表(2014年17期)2014-04-04 11:56:50