基于Flexsim 的兩棲艦船裝卸載流程可視化仿真研究
2021-08-07 06:19:36徐清華謝川予
火力與指揮控制 2021年7期
徐清華,宋 劍,謝川予
(解放軍91976 部隊(duì),廣州 510430)
0 引言
Flexsim 是一種面向?qū)ο蟮目梢暬鞒谭抡娼9ぞ撸苁箾Q策者通過(guò)可視化建模方法構(gòu)建任何分散式系統(tǒng)流程,透過(guò)Flexsim 可以率先找到作業(yè)流程模式,從而能幫助決策者形象地在動(dòng)態(tài)三維虛擬現(xiàn)實(shí)環(huán)境中模擬、監(jiān)控及評(píng)估流程系統(tǒng),為尋找優(yōu)秀流程提供決策分析,從而達(dá)到優(yōu)化流程目的[1]。兩棲艦船作戰(zhàn)兵力裝卸載是典型的作業(yè)流程問(wèn)題,安全、可靠、快速地裝卸載是兩棲艦船完成兩棲作戰(zhàn)任務(wù)的前提。通過(guò)Flexsim 可視化工具對(duì)兩棲艦船裝卸載兩棲車輛作業(yè)進(jìn)行可視化建模仿真,分析兩棲艦船裝載方案和裝載流程結(jié)論數(shù)據(jù),為優(yōu)化裝載方案和作業(yè)流程提供決策。
1 Flexsim 平臺(tái)可視化流程仿真過(guò)程
Flexsim 是一套可視化仿真模型設(shè)計(jì)、制作與分析軟件。它集計(jì)算機(jī)仿真、圖像處理、數(shù)據(jù)分析及人工智能技術(shù)于一體,適合軍事作業(yè)流程仿真研究與實(shí)踐。
1.1 布局設(shè)計(jì)
依據(jù)實(shí)際設(shè)計(jì)的作業(yè)方案進(jìn)行仿真系統(tǒng)的布局設(shè)計(jì)。可視化作業(yè)流程仿真可以將設(shè)計(jì)好的裝卸搬運(yùn)系統(tǒng)進(jìn)行合理階段劃分,通常按照系統(tǒng)布局區(qū)域劃分,使用對(duì)象庫(kù)中的實(shí)體作為容器,連接各容器的輸入輸出便可以完成仿真模型。
1.2 實(shí)體關(guān)系
實(shí)體關(guān)系就是各連接對(duì)象的確定關(guān)系。在Flexsim 中實(shí)體間的關(guān)系分為輸入輸出關(guān)系和中心端口連接關(guān)系。輸入輸出關(guān)系是指兩個(gè)固定實(shí)體間的關(guān)系,中心端口連接關(guān)系多用于固定實(shí)體和輸送設(shè)備實(shí)體之間,也用于兩實(shí)體間相互通信。
1.3 參數(shù)設(shè)定
Flexism 提供簡(jiǎn)單的參數(shù)設(shè)定,雙擊對(duì)象可以打開對(duì)象的參數(shù)對(duì)話框進(jìn)行設(shè)定。盡管Flexsim 中已經(jīng)有很多設(shè)定參數(shù)可供選擇,但很難滿足個(gè)性化仿真建模的需要,可以通過(guò)一套命令集來(lái)修改實(shí)體屬性、編寫實(shí)體動(dòng)作甚至自定義實(shí)體[2]。
1.4 運(yùn)行模型
通過(guò)編譯、運(yùn)行實(shí)現(xiàn)全場(chǎng)景仿真,并以三維圖表、文字及時(shí)顯示仿真輸出數(shù)據(jù),也可以定制仿真觀察角度和演示路徑,自制演示視頻等,為用戶提供多維度模型運(yùn)行監(jiān)視效果。
1.5 仿真輸出
實(shí)時(shí)查看相應(yīng)對(duì)象的統(tǒng)計(jì)數(shù)據(jù)和圖表,生成標(biāo)準(zhǔn)統(tǒng)計(jì)報(bào)告和狀態(tài)統(tǒng)計(jì)報(bào)告,為系統(tǒng)作業(yè)流程仿真提供分析數(shù)據(jù)。
2 兩棲艦船裝卸載流程仿真建模
以大型兩棲艦船投送兩棲車輛為研究對(duì)象,構(gòu)建兩棲艦船裝卸載兩棲車輛作業(yè)流程仿真模型。首先,根據(jù)作業(yè)仿真需求設(shè)計(jì)布局,也就是制定兩棲車輛在艦船上的布列方案;其次,確定兩棲車輛在艦船上的裝卸載作業(yè)流程方法,也就是裝卸載作業(yè)流程規(guī)則;再次,根據(jù)仿真設(shè)計(jì)方案輸入相關(guān)的流程仿真參數(shù);最后,進(jìn)行兩棲車輛裝卸流程可視化仿真運(yùn)行并輸出仿真結(jié)論[3]。
2.1 制定裝載布列方案
兩棲艦船裝卸載兩棲車輛流程仿真建模的首要任務(wù)是確定作業(yè)流程的兩棲車輛在裝卸過(guò)程中的布列方案,也就是確定所有兩棲車輛作為作業(yè)實(shí)體需要搬運(yùn)的空間狀態(tài),兩棲艦船裝載兩棲車輛的各個(gè)艙室就是兩棲車輛布列空間,兩棲車輛就是仿真系統(tǒng)中的實(shí)體,在艦船上存放的位置就是裝載的布列方案[4]。
設(shè)某型兩棲艦船需要投送一批兩棲車輛執(zhí)行任務(wù),采用碼頭裝卸載方法,該型艦船共有A、B、C、D 4 個(gè)艙室可以用來(lái)裝載被投送的兩棲車輛,艦船配置有側(cè)門連接艙室C 的通道E,有艙室C 連接艙室D 的通道F,有艙室C 連接艙室B 的通道G,有艙室B 連接艙室A 的通道H,其中,通道E、F、G 是固定通道,H 是垂直電梯通道,兩棲艦船裝載空間布局如圖1 所示,兩棲車輛布列方案如圖2~圖4所示。

圖1 艦船裝載空間布局圖

圖2 兩棲車輛A 艙布列圖

圖3 兩棲車輛B 艙布列圖

圖4 兩棲車輛C 艙和D 艙布列圖
2.2 確定流程仿真規(guī)則
系統(tǒng)仿真流程規(guī)則必須遵守艦船裝卸載規(guī)則,這是保障被裝載兵力安全上下船的基本保證,也是提高裝卸效率的基本要求。裝載流程是保障被裝載兵力能夠按照裝載方案進(jìn)行有序、安全、快速的裝載,卸載流程是裝載的逆過(guò)程,在制定裝載方案和流程時(shí)就應(yīng)考慮兵力卸載的安全性、快速性和實(shí)踐性,因此,卸載速度往往比裝載速度要快,流程更加簡(jiǎn)單[5]。
規(guī)則1:車輛從碼頭機(jī)動(dòng)至艙室C 指定車位。必須待前序車輛通過(guò)通道門E 并轉(zhuǎn)向進(jìn)入艙室C 后,后序車輛才可以從碼頭開始機(jī)動(dòng)進(jìn)入通道E;前序車輛機(jī)動(dòng)至指定車位后,后續(xù)車輛才可以開始從離開通道E 處向指定車位機(jī)動(dòng);所有車輛機(jī)動(dòng)至艙室C 指定車位,該艙室裝載流程結(jié)束。
規(guī)則2:車輛從碼頭機(jī)動(dòng)至艙室D 指定車位。機(jī)動(dòng)路線:從碼頭經(jīng)過(guò)通道E 進(jìn)入艙室C,再經(jīng)過(guò)通道F 至艙室D。機(jī)動(dòng)規(guī)則:從碼頭機(jī)動(dòng)至艙室C 時(shí),必須待前序車輛通過(guò)通道門E 并轉(zhuǎn)向進(jìn)入艙室C 后,后序車輛才可以從碼頭開始機(jī)動(dòng)進(jìn)入通道E;車輛從艙室C 機(jī)動(dòng)至艙室D 時(shí),前序車經(jīng)過(guò)艙室C 至艙室D 的通道F 后,后續(xù)車才可開始從離開通道E 處由C 艙往D 艙機(jī)動(dòng),等待前序車在艙室D 機(jī)動(dòng)至指定車位后,方可從艙室F 通道處向艙室D 機(jī)動(dòng),否則必須在通道E 或通道F 處等待;所有車輛機(jī)動(dòng)至艙室D 指定車位,該艙室裝載流程結(jié)束。
規(guī)則3:車輛從碼頭機(jī)動(dòng)進(jìn)入艙室B 指定車位。機(jī)動(dòng)路線:從碼頭經(jīng)過(guò)通道E 進(jìn)入艙室C,再經(jīng)過(guò)通道G 至艙室B。機(jī)動(dòng)規(guī)則:車輛從碼頭機(jī)動(dòng)至艙室C 時(shí),必須待前序車輛通過(guò)通道門E 并轉(zhuǎn)向進(jìn)入艙室C 后,后序車輛才可以從碼頭開始機(jī)動(dòng)進(jìn)入通道E;車輛從艙室C 至艙室B 時(shí),前序車經(jīng)過(guò)艙室C至艙室B 的通道F 后,后續(xù)車才可開始從離開通道E 處由C 艙往B 艙機(jī)動(dòng),等待前序車在艙室B 機(jī)動(dòng)至指定車位后,方可從艙室C 至艙室B 的通道G 機(jī)動(dòng),否則必須在通道E 或通道G 處等待;所有車輛機(jī)動(dòng)至艙室B 指定車位,該艙室裝載流程結(jié)束。
規(guī)則4:車輛從碼頭機(jī)動(dòng)至艙室A 指定車位。機(jī)動(dòng)路線:從碼頭經(jīng)過(guò)通道E 進(jìn)入艙室C,再經(jīng)過(guò)通道G 至艙室B,最后經(jīng)過(guò)通道H 至艙室A。機(jī)動(dòng)規(guī)則:車輛從碼頭機(jī)動(dòng)至艙室C 時(shí),必須待前序車輛通過(guò)通道門E 并轉(zhuǎn)向進(jìn)入艙室C 后,后序車輛才可以從碼頭開始機(jī)動(dòng)進(jìn)入通道E;車輛從艙室C 至艙室B時(shí),前序車經(jīng)過(guò)艙室C 至艙室B 的通道F 后,后續(xù)車才可開始從離開通道E 處由C 艙往B 艙機(jī)動(dòng);車輛從艙室B 至艙室A 時(shí),前序車(一次性搭載的車輛)經(jīng)過(guò)艙室B 至艙室A 的通道H 后,后續(xù)車(一次性可搭載的車輛)才可開始離開通道G 處由B 艙往A 艙機(jī)動(dòng),等待前序車從艙室A 機(jī)動(dòng)至指定車位后,方可從艙室B 至艙室A 的通道H 機(jī)動(dòng),否則必須在通道E、通道G 或通道H 處等待;所有車輛機(jī)動(dòng)至艙室A 指定車位,該艙室裝載流程結(jié)束。
規(guī)則5:艙室裝載的順序。艙室裝載順序沒(méi)有統(tǒng)一的標(biāo)準(zhǔn),但必須滿足該艙室裝載完車輛后,不影響后續(xù)車輛在該艙室的機(jī)動(dòng)限制,否則后續(xù)車輛無(wú)法進(jìn)行正常裝載。結(jié)合某型艦船艙室布局特點(diǎn),必須滿足:A 艙室裝載完才可以裝載B 艙室,B 艙室裝載完才可以裝載C 艙室,D 艙室裝載完才可以裝載C 艙室。
規(guī)則6:所有的通道E、F、G 不可以同時(shí)存在2輛及以上數(shù)量車輛;通道H 可以同時(shí)搭載的車輛數(shù)量不多于最大車輛容量。
規(guī)則7:車輛與車輛在機(jī)動(dòng)過(guò)程中間距不少于5 m;車輛到達(dá)指定車位需進(jìn)行前進(jìn)、后退、轉(zhuǎn)向動(dòng)作調(diào)整車位至準(zhǔn)確位置,調(diào)整過(guò)程采用的速度符合正態(tài)分布規(guī)律,最大速度不超過(guò)該車型在該艙室機(jī)動(dòng)最大限速。
規(guī)則8:裝載流程開始時(shí)間為第1 輛車輛從碼頭開始進(jìn)入通道E 的時(shí)刻;裝載流程結(jié)束時(shí)間為最后一輛車輛到達(dá)某艙室指定位置的時(shí)刻。
規(guī)則9:車輛卸載的順序。車輛卸載順序沒(méi)有統(tǒng)一的標(biāo)準(zhǔn),但必須滿足該車輛卸載前不能影響其他車輛經(jīng)過(guò)該艙室的機(jī)動(dòng)限制,否則無(wú)法進(jìn)行正常卸載。
規(guī)則10:卸載流程開始時(shí)間為第1 輛車輛從指定車位開始機(jī)動(dòng)時(shí)刻;卸載流程結(jié)束時(shí)間為最后一輛車輛脫離艦船的時(shí)刻。
2.3 輸入流程仿真參數(shù)
建模仿真是為評(píng)價(jià)系統(tǒng)設(shè)計(jì)方案服務(wù)。為達(dá)到這個(gè)目的往往要對(duì)方案多次修改,多次仿真,這樣就要求仿真系統(tǒng)能根據(jù)使用需求靈活輸入、修改數(shù)據(jù)。Flexism 中集成了Excel 插件,仿真系統(tǒng)初始數(shù)據(jù)可以通過(guò)Excel 插件導(dǎo)入到所建立的全局表中,模型中所有初始數(shù)據(jù)都可以從全局表中直接獲得。Excel 本身具有強(qiáng)大計(jì)算統(tǒng)計(jì)功能,因此,只要事先設(shè)計(jì)好數(shù)據(jù)表格的形式并輸入數(shù)據(jù),便能輕松計(jì)算出其他所需數(shù)據(jù)。
2.3.1 輸入裝載實(shí)體及流程仿真控制數(shù)據(jù)
主要導(dǎo)入各個(gè)裝載艙室及被裝載兵力名稱、裝載順序、間隔等待時(shí)間等裝載要素?cái)?shù)據(jù),這些數(shù)據(jù)主要用于控制仿真流程的排隊(duì)順序、排隊(duì)等待時(shí)間等規(guī)則。
2.3.2 輸入裝載實(shí)體流程仿真性能數(shù)據(jù)
主要輸入裝載實(shí)體運(yùn)動(dòng)屬性,如裝備在裝載過(guò)程的水平運(yùn)動(dòng)速度、爬坡速度、涉水速度、過(guò)通道速度、電梯運(yùn)行速度等性能參數(shù)。
2.4 流程仿真控制
當(dāng)構(gòu)建好仿真規(guī)則模型并輸入相關(guān)仿真參數(shù)后,就可以進(jìn)行裝卸載作業(yè)流程的仿真運(yùn)算,為了較好地觀察整個(gè)仿真過(guò)程產(chǎn)生的效果,可以對(duì)仿真過(guò)程進(jìn)行控制,例如暫停、加速、減速、實(shí)體空間顯示、實(shí)體仿真可視化布局等,如圖5 所示。

圖5 流程仿真顯示控制視圖
2.5 流程仿真輸出分析
1)仿真結(jié)果輸出。仿真結(jié)果輸出是將仿真過(guò)程中獲取的仿真結(jié)果以表格、圖形等方式輸出,供決策者進(jìn)行分析使用,如圖6 所示。
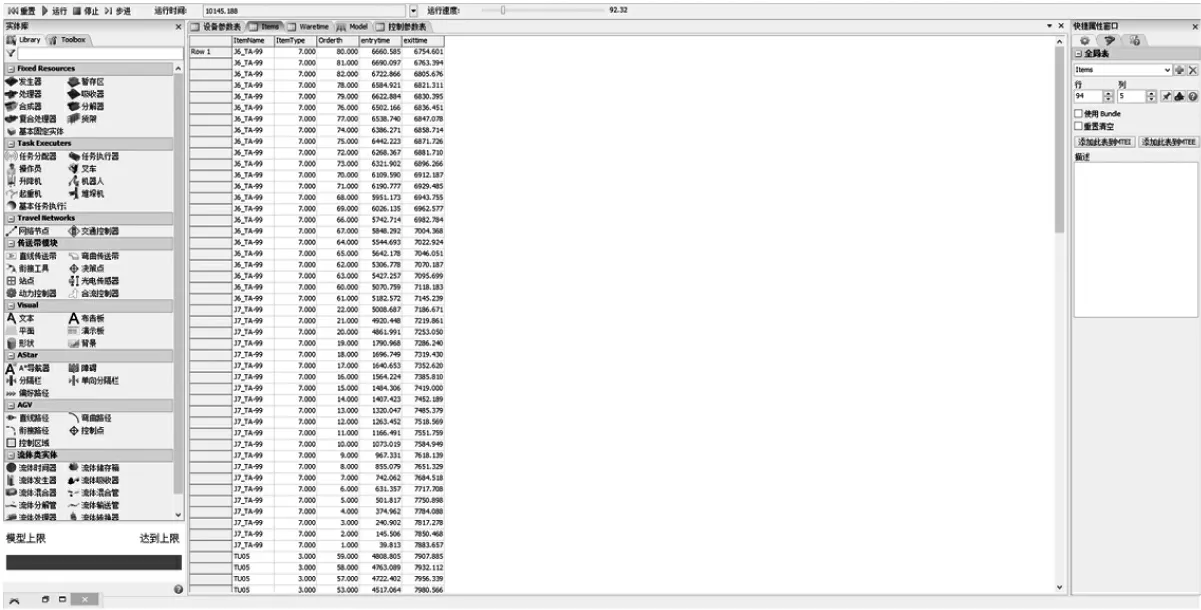
圖6 流程仿真結(jié)果輸出
2)仿真結(jié)果分析。Flexsim 的仿真結(jié)果可以直接輸出到任何能與ODBC 相連的數(shù)據(jù)庫(kù)中,數(shù)據(jù)庫(kù)表的形式都是軟件設(shè)計(jì)好的,不僅有標(biāo)準(zhǔn)的數(shù)據(jù)報(bào)告,還可以進(jìn)行數(shù)據(jù)分析,如圖7 所示。

圖7 流程仿真結(jié)果分析報(bào)告
3 仿真實(shí)例
以某型兩棲艦船采用碼頭裝載和碼頭卸載的方法,對(duì)兩棲車輛裝卸載作業(yè)流程進(jìn)行仿真實(shí)例分析,共有3 型(X、Y、Z)共84 輛兩棲車分別裝載在A、B、C、D 4 個(gè)艙室,兩棲車輛艙室配置如表1 所示,兩棲車輛在各艙室和通道機(jī)動(dòng)的性能參數(shù)如表2 所示。實(shí)例依據(jù)裝卸載規(guī)則采用2 種裝卸載流程方案進(jìn)行仿真,計(jì)算2 種流程方案裝卸所需要的時(shí)間,并對(duì)方案進(jìn)行比較分析。

表2 兩棲車輛在艦船中各艙室和通道機(jī)動(dòng)的性能參數(shù)(單位:km/h)
3.1 確定裝載布列方案
兩棲艦船車輛布列方案如圖2~ 圖4 所示,其中10 輛Z 型車裝載在艙室A,34 輛Y 型車裝載在艙室B,20 輛X 型車裝載在艙室C,20 輛X 型車裝載在艙室D,如表1 所示。

表1 兩棲車輛艙室配置表
3.2 輸入流程仿真參數(shù)
方案1:依次按照艙室A→艙室D→艙室B→艙室C 的順序裝載,控制各車輛的裝載順序,如下頁(yè)圖8 所示,ArrivalTime 參數(shù)能夠控制各車輛的裝載順序,卸載采用裝載的逆序。

圖8 方案1 兩棲車輛控制參數(shù)
方案2:先按照艙室A 和艙室D 交錯(cuò)順序裝載,再艙室B→艙室C 的順序裝載,控制各車輛的裝載順序,如圖9 所示,ArrivalTime 參數(shù)能夠控制各車輛的裝載順序,卸載順序同方案1,保障兩棲車輛卸載后快速形成作戰(zhàn)隊(duì)形。

圖9 方案2 兩棲車輛控制參數(shù)
3.3 流程仿真輸出分析
方案1:依次按照艙室A→艙室D→艙室B→艙室C 的順序裝載輸出,數(shù)據(jù)統(tǒng)計(jì)如表3 所示。
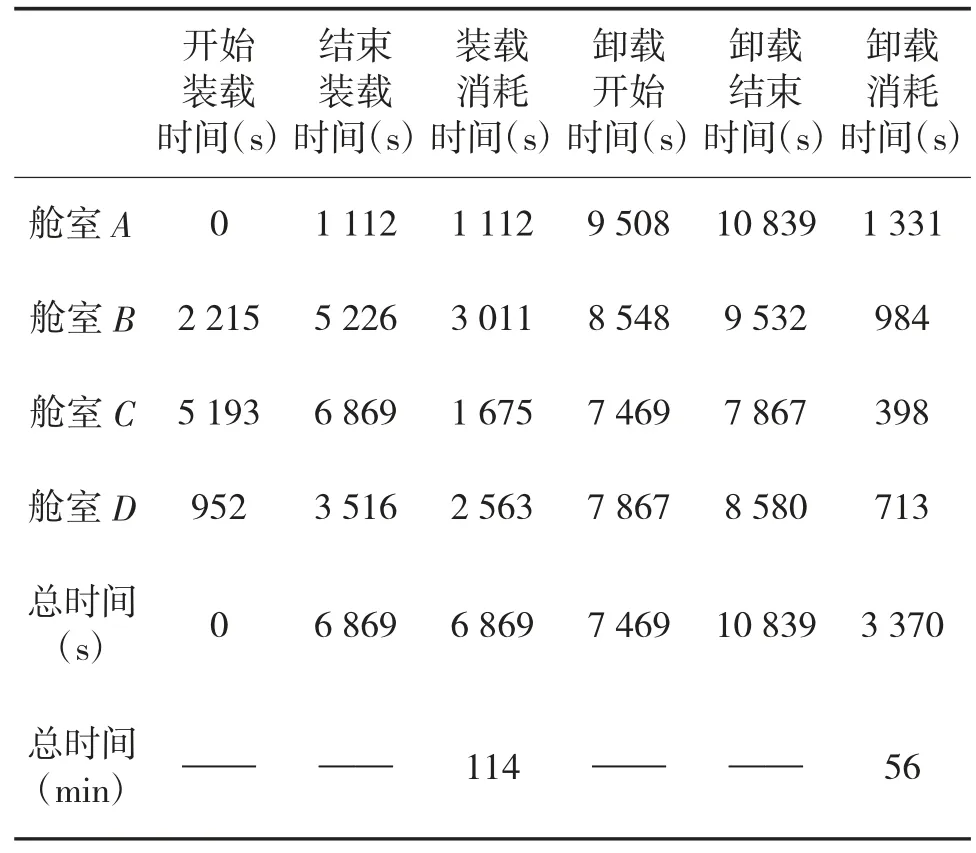
表3 方案1 仿真輸出數(shù)據(jù)
方案2:先按照艙室A 和艙室D 交錯(cuò)順序裝載,再艙室B→艙室C 的順序裝載輸出,數(shù)據(jù)統(tǒng)計(jì)如表4 所示。

表4 方案2 仿真輸出數(shù)據(jù)
結(jié)論分析:從以上兩種裝載方案流程作業(yè)仿真輸出數(shù)據(jù)可以分析,方案1 采用各艙室依次順序裝載所需要裝載時(shí)間為114 min,卸載所需時(shí)間為56 min;方案2 采取兩棲車輛艙室交錯(cuò)并行,裝載所需時(shí)間為101 min,卸載所需時(shí)間為56 min;方案2 裝載所需要時(shí)間比方案1 所需要時(shí)間減少13 min,節(jié)約11%的時(shí)間;由于在制定裝載方案過(guò)程中充分考慮了兩棲車輛卸載比裝載更加緊迫,因此,卸載時(shí)間比裝載時(shí)間都少,接近裝載時(shí)間的50 %,滿足作戰(zhàn)實(shí)際需求,符合作戰(zhàn)需求規(guī)律。
4 結(jié)論
兩棲艦船裝卸載是未來(lái)登陸作戰(zhàn)重要環(huán)節(jié),是登陸作戰(zhàn)兵力安全、可靠、快速上陸的基本保障。由于裝卸載過(guò)程涉及到復(fù)雜的戰(zhàn)場(chǎng)環(huán)境,多樣的登陸作戰(zhàn)兵力,多類型的輸送工具,因此,采用的裝卸載方法和組織實(shí)施過(guò)程都不盡相同,科學(xué)研究裝卸載組織流程方法,以及評(píng)估和優(yōu)化裝卸流程是提升登陸作戰(zhàn)戰(zhàn)斗力的有效途徑。