基于飛行軌跡的三維模型實(shí)時(shí)姿態(tài)調(diào)整算法
2021-08-07 06:19:42魏五洲李軍明胡彭輝
火力與指揮控制 2021年7期
關(guān)鍵詞:飛機(jī)
魏五洲,高 峰,李軍明,胡彭輝
(1.解放軍63850 部隊(duì),吉林 白城 137001;2.中國電子信息產(chǎn)業(yè)集團(tuán)有限公司第六研究所,北京 102209)
0 引言
在三維GIS(地理信息系統(tǒng))彈道可視化系統(tǒng)中,導(dǎo)彈飛行姿態(tài)的實(shí)時(shí)、精確調(diào)整是直觀決定導(dǎo)彈測(cè)控試驗(yàn)成功的重要因素之一。目前對(duì)高速飛行目標(biāo)的姿態(tài)測(cè)量方法主要分為兩大類:一類是姿態(tài)內(nèi)測(cè)[1],即在飛行目標(biāo)上掛載測(cè)量傳感器采集飛行目標(biāo)的姿態(tài)數(shù)據(jù);另一類是姿態(tài)外測(cè)[2],即利用地面測(cè)量設(shè)備對(duì)飛行目標(biāo)姿態(tài)進(jìn)行測(cè)量。姿態(tài)內(nèi)測(cè)的方法目前已經(jīng)比較廣泛地應(yīng)用于飛機(jī)等航空器上,但還存在實(shí)時(shí)性較弱、測(cè)量誤差較大等不足[3]。姿態(tài)外測(cè)比較典型的方法是采用高速攝像機(jī)和光學(xué)經(jīng)緯儀拍攝飛行目標(biāo)的影像數(shù)據(jù),然后對(duì)這些影像序列進(jìn)行分析進(jìn)而得出飛行目標(biāo)的姿態(tài)。但是由于飛行目標(biāo)的高速性和遠(yuǎn)距離性,用影像序列的分析手段在技術(shù)上還存在許多困難[4-6]。
由于雷達(dá)設(shè)備對(duì)飛行目標(biāo)的軌跡數(shù)據(jù)的采集具有實(shí)時(shí)性高和準(zhǔn)確性好等[7-8]特點(diǎn)。本文在對(duì)導(dǎo)彈的飛行姿態(tài)可視化的研究中,為了在三維GIS 彈道可視化系統(tǒng)中能夠?qū)崟r(shí)仿真出平滑、逼真的導(dǎo)彈飛行姿態(tài),提出一種姿態(tài)外測(cè)的方法,即基于飛行軌跡求解導(dǎo)彈姿態(tài)的算法。
1 基于飛行軌跡的導(dǎo)彈姿態(tài)調(diào)整算法
為了驗(yàn)證該算法實(shí)用性,將該算法用于某型號(hào)導(dǎo)彈的飛行態(tài)勢(shì)仿真,本文在國產(chǎn)麒麟Linux 操作系統(tǒng)下,基于osg3.4 和osgEarth2.8 三維可視化庫,使用建模工具,對(duì)基于飛行軌跡的導(dǎo)彈姿態(tài)生成算法進(jìn)行研究,研究過程中的數(shù)據(jù)響應(yīng)速度達(dá)到了毫秒(ms)量級(jí),實(shí)時(shí)性非常好,具體算法如圖1 所示。
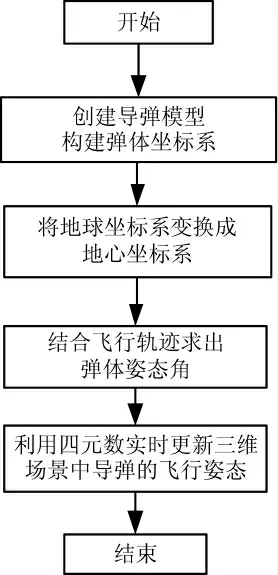
圖1 基于飛行軌跡的導(dǎo)彈姿態(tài)調(diào)整算法原理圖
首先,使用建模工具創(chuàng)建導(dǎo)彈模型,確定彈體坐標(biāo)系OXYZ 各軸指向;通過地球坐標(biāo)系與地心坐標(biāo)系的變換,將導(dǎo)彈模型加載到三維地球上;再根據(jù)飛行軌跡點(diǎn)以及地面坐標(biāo)系與彈體坐標(biāo)系的角度關(guān)系求出彈體姿態(tài)角;最后利用四元數(shù)旋轉(zhuǎn)矩陣實(shí)時(shí)更新三維地球上導(dǎo)彈的飛行姿態(tài)。
2 算法實(shí)現(xiàn)
2.1 構(gòu)建彈體坐標(biāo)系
三維空間中各坐標(biāo)系之間的關(guān)系,如圖2 所示。地心坐標(biāo)系OX0Y0Z0:即原點(diǎn)O 在地球的中心,OZ0軸指向北極方向,OX0軸為赤道面與黃道面的交線且指向春分點(diǎn),OY0軸垂直O(jiān)X0和OZ0軸所在的平面且符合右手定則。

圖2 各坐標(biāo)系之間的關(guān)系
地球坐標(biāo)系OX1Y1Z1:即OZ1軸與地心坐標(biāo)系軸OZ0重合,OX1和OY1軸位于赤道平面且OX1軸指向格林尼治子午線,OY1軸垂直O(jiān)X1軸指向東經(jīng)90°方向。地球附近任意一個(gè)坐標(biāo)位置都可以用經(jīng)度、緯度和高度表示。
地面坐標(biāo)系OX2Y2Z2:即東北天坐標(biāo)系,OX2指向東,OY2指向北,OZ2垂直地面指向天空。
彈體坐標(biāo)系OXYZ,即原點(diǎn)O 位于導(dǎo)彈重心,OX 軸沿彈體橫軸指向右,OY 軸與彈體縱軸重合,指向?qū)楊^部,OZ 軸沿彈體豎軸指向上。
2.2 加載導(dǎo)彈模型
根據(jù)導(dǎo)彈在地球坐標(biāo)系下的初始位置點(diǎn)P0(L0,B0,H0)將導(dǎo)彈加載到三維地球上,其中,L0、B0、H0分別表示導(dǎo)彈的經(jīng)度,緯度和海拔高度。
首先使用式(1)把角度制表示的經(jīng)緯度轉(zhuǎn)化為弧度制表示的經(jīng)緯度,然后使用式(2)將導(dǎo)彈在地球坐標(biāo)系下的當(dāng)前位置點(diǎn)轉(zhuǎn)化為地心坐標(biāo)系下的點(diǎn)(X,Y,Z)。

其中,R 表示轉(zhuǎn)化的弧度,A 表示需要轉(zhuǎn)化的角度。
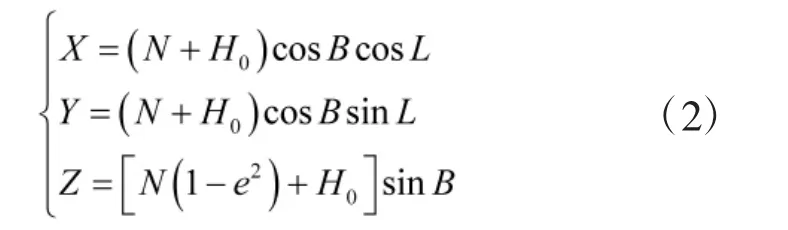
式(2)中,點(diǎn)(X,Y,Z)表示地心坐標(biāo)系中的點(diǎn)坐標(biāo),B 、L 分別表示弧度制的經(jīng)度、緯度。a 表示地球的長半軸,b 表示地球的短半軸,a 和b 的值為一固定的常量,a=6 378.137 0 km,b=6 356.752 3 km。e 為地球的第一偏心率,N 表示地球曲率半徑,W 為第一輔助系數(shù),計(jì)算公式如式(3)~式(5)。


加載完成后,彈體坐標(biāo)系與地面坐標(biāo)系的關(guān)系如圖4 所示,彈體坐標(biāo)系的OY 軸指向正北,即與地面坐標(biāo)系OY2軸重合;彈體坐標(biāo)系的OX 軸指向正東,即與地面坐標(biāo)系OX2軸重合;彈體坐標(biāo)系的OZ軸垂直地面指向天空,即與地面坐標(biāo)系OZ2軸重合。

圖4 俯仰角示意圖
俯仰角為繞X 軸旋轉(zhuǎn)的角度,即彈體坐標(biāo)系縱軸OY 與地面坐標(biāo)系OY2之間夾角,角度范圍為[-90°,90°],導(dǎo)彈抬頭向上為正,向下為負(fù);航向角為繞Z 軸旋轉(zhuǎn)的角度,即彈體坐標(biāo)系OY 在地面坐標(biāo)系水平面的投影與地面坐標(biāo)系OY2之間夾角,角度范圍[0°,360°],順時(shí)針旋轉(zhuǎn)為正;橫滾角為繞Y 軸旋轉(zhuǎn)的角度,即彈體坐標(biāo)系OX 軸與地面坐標(biāo)系水平面的夾角,角度范圍[0°,360°],順時(shí)針旋轉(zhuǎn)為正。
2.3 姿態(tài)角的求解
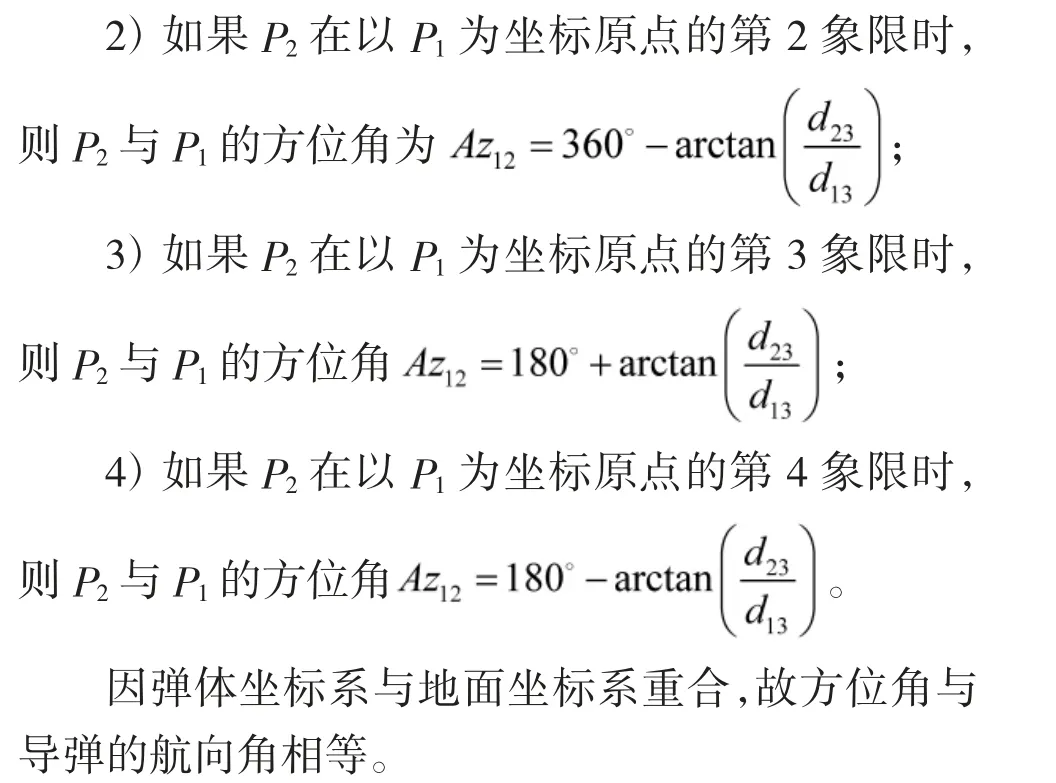
方位角(Azimuth angle,縮寫為Az)是從某點(diǎn)的指北方向線起依順時(shí)針方向到目標(biāo)方向線之間的水平夾角[5]。假設(shè)導(dǎo)彈飛行一個(gè)軌跡點(diǎn)P1(L1,B1,H1),相鄰的下一個(gè)軌跡點(diǎn)P2(L2,B2,H2),如圖3 所示,將P2點(diǎn)投影在P1所在平面上,P3是與P1同經(jīng)度,同高度,與P2同緯度的點(diǎn),即P3(L1,B2,H1)。

圖3 方位角示意圖
根據(jù)地球上任意兩點(diǎn)距離公式[6],d 表示P1和P2兩點(diǎn)間的距離,r0為地球半徑6 378.137 0 km,計(jì)算方法如式(6)。

如圖4 所示,P2'是P2在P1平面的投影。根據(jù)P2與P1兩點(diǎn)的高度差h 和P2與P1兩點(diǎn)之間距離d12,則俯仰角按式(7)計(jì)算。

橫滾角可根據(jù)導(dǎo)彈的飛行關(guān)鍵位置進(jìn)行動(dòng)態(tài)設(shè)置,如果不需要可以設(shè)置為0.0,本算法橫滾角初始化為0.0°,每50 ms 增加0.1°。
2.4 計(jì)算四元數(shù)旋轉(zhuǎn)矩陣
在三維程序設(shè)計(jì)中,為了避免歐拉角旋轉(zhuǎn)時(shí)萬向鎖的存在且四元數(shù)使用4 個(gè)數(shù)值就可以表示旋轉(zhuǎn),占用存儲(chǔ)空間更小[9-10],本文采用四元數(shù)旋轉(zhuǎn)來調(diào)整三維場(chǎng)景中動(dòng)態(tài)目標(biāo)的姿態(tài)。
四元數(shù)是一種高階復(fù)數(shù)[9],四元數(shù)q 按式(8)表示。


歐拉角旋轉(zhuǎn)矩陣M 為:

再結(jié)合如式(10)的半角公式。

容易得出如式(11)的四元數(shù)的旋轉(zhuǎn)矩陣Q。
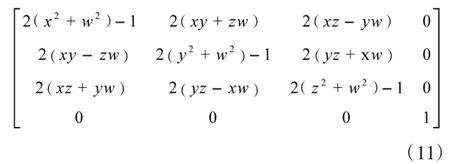
最后結(jié)合求出的姿態(tài)角以及式(9)和式(11),分別得出繞Z 軸、X 軸、Y 軸的四元數(shù)旋轉(zhuǎn)矩陣QZ、QX和QY。本算法采用的旋轉(zhuǎn)順序?yàn)閆→X→Y,故得到最終的旋轉(zhuǎn)矩陣QL=QZQXQY,最后利用QL實(shí)時(shí)更新三維地球中導(dǎo)彈模型的姿態(tài)即可。
3 算法驗(yàn)證
3.1 仿真試驗(yàn)
根據(jù)本文算法的實(shí)現(xiàn)方法,將本文算法實(shí)際用于某型號(hào)導(dǎo)彈測(cè)控試驗(yàn)中姿態(tài)的調(diào)整。
圖5 是采用經(jīng)緯儀和本文算法的導(dǎo)彈飛行姿態(tài)圖,圖5(a)、(c)是導(dǎo)彈上升階段的姿態(tài),圖5(b)、(d)是導(dǎo)彈下降階段的姿態(tài),圖片中伴隨模型的線條是實(shí)時(shí)飛行軌跡線。從圖5(a)、(b)可以直觀看出,導(dǎo)彈的飛行姿態(tài)和實(shí)時(shí)飛行軌跡線之間存在角度偏差,飛行效果不逼真,這是由于光學(xué)經(jīng)緯儀等測(cè)量設(shè)備的實(shí)時(shí)性和準(zhǔn)確性不高,導(dǎo)致飛行姿態(tài)的數(shù)據(jù)出現(xiàn)延時(shí),誤差大或者缺失等問題。而圖5(c)、(d)中采用本文算法仿真的導(dǎo)彈飛行姿態(tài)和實(shí)時(shí)飛行軌跡線始終保持一致,逼真度較高,實(shí)際動(dòng)態(tài)效果流暢。

圖5 導(dǎo)彈飛行姿態(tài)圖
3.2 算法的通用性研究
為了驗(yàn)證本文算法對(duì)其他飛行目標(biāo)姿態(tài)調(diào)整的效果,將本算法用于飛機(jī)模型的仿真試驗(yàn),飛機(jī)坐標(biāo)系OXYZ,即原點(diǎn)O 位于飛機(jī)重心,OX 軸沿彈體橫軸指向右,OY 軸與彈體縱軸重合,指向飛機(jī)頭部,OZ 軸沿彈體豎軸指向上。飛機(jī)飛行時(shí),本算法計(jì)算出的姿態(tài)數(shù)據(jù)不斷地賦值給飛機(jī),飛機(jī)在飛行過程中呈現(xiàn)出不同的變化姿態(tài)。
圖6 是對(duì)飛機(jī)模型使用本文算法的實(shí)時(shí)態(tài)勢(shì)的展示效果圖,可以看出,飛機(jī)的飛行態(tài)勢(shì)隨著飛行軌跡實(shí)時(shí)不斷變化,實(shí)時(shí)性好,效果流暢,飛行姿態(tài)逼真,觀賞性強(qiáng)。

圖6 使用本文算法的飛機(jī)姿態(tài)效果圖
4 結(jié)論
本文提出一種基于飛行軌跡的三維模型實(shí)時(shí)姿態(tài)調(diào)整算法,該算法利用實(shí)時(shí)性和準(zhǔn)確性較穩(wěn)定的三維模型飛行軌跡數(shù)據(jù),自動(dòng)生成飛行姿態(tài)數(shù)據(jù),實(shí)時(shí)調(diào)整三維場(chǎng)景中三維模型的飛行姿態(tài)。將該算法用于在某型號(hào)導(dǎo)彈飛行態(tài)勢(shì)的三維GIS 仿真模擬試驗(yàn)中,從導(dǎo)彈呈現(xiàn)出的飛行態(tài)勢(shì)以及求出的姿態(tài)數(shù)據(jù)可以看出,該算法自動(dòng)生成的飛行態(tài)勢(shì)精確度高,實(shí)際應(yīng)用效果好。將該算法應(yīng)用于飛機(jī)的飛行姿態(tài)的模擬,仿真結(jié)果表明,飛機(jī)也呈現(xiàn)出很好的飛行效果,由此得出本文算法通用于動(dòng)態(tài)目標(biāo)的飛行姿態(tài)調(diào)整。
猜你喜歡
青少年科技博覽(中學(xué)版)(2022年6期)2022-08-31 09:03:40
小哥白尼(軍事科學(xué))(2022年3期)2022-06-09 03:11:24
環(huán)球時(shí)報(bào)(2022-05-30)2022-05-30 15:16:57
小哥白尼(趣味科學(xué))(2020年12期)2021-01-18 06:15:26
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2020-11-27 17:34:02
青少年科技博覽(中學(xué)版)(2020年2期)2020-05-21 03:35:16
當(dāng)代陜西(2019年11期)2019-06-24 03:40:28
百科探秘·航空航天(2017年11期)2017-12-20 07:31:34
百科探秘·航空航天(2017年12期)2017-08-15 00:55:45
作文周刊·小學(xué)一年級(jí)版(2017年9期)2017-06-20 00:19:33