傾轉(zhuǎn)翼無人機(jī)垂直起降段航向控制建模與分析
2021-08-07 02:03:32任峻萱何國毅劉潤芃
科技創(chuàng)新與應(yīng)用 2021年21期
關(guān)鍵詞:飛機(jī)
任峻萱,王 琦,何國毅,劉潤芃
(南昌航空大學(xué) 飛行器工程學(xué)院,江西 南昌 330063)
飛機(jī)作為目前最重要的交通運(yùn)輸工具之一,對人類的生產(chǎn)和生活起著不可替代的作用。傾轉(zhuǎn)旋翼飛機(jī)是一種將固定翼飛機(jī)和直升機(jī)融為一體的新型飛行器[1],既具有直升機(jī)垂直起降和空中懸停的能力,又具有普通固定翼飛機(jī)高速巡航飛行的能力[2]。由于它具有垂直起降(Vertical Take-Off and Landing)的能力[3],故在不具備長跑道的條件下可以很好地發(fā)揮長距離、高效率運(yùn)輸?shù)奶攸c(diǎn),在軍用和民用急救等方面都具有很大的開發(fā)潛能[4]。例如,目前在美軍服役的V-22“魚鷹”就是一種典型的傾轉(zhuǎn)旋翼飛機(jī)[5]。
傾轉(zhuǎn)翼飛機(jī)與傾轉(zhuǎn)旋翼飛機(jī)類似[6],由于傾轉(zhuǎn)旋翼飛行器在垂直起降模式下,下洗氣流被固定機(jī)翼阻擋,將產(chǎn)生15%~20%的升力損失[7],因此,傾轉(zhuǎn)翼飛機(jī)將受氣流影響最嚴(yán)重的部分機(jī)翼與螺旋槳?jiǎng)恿ο到y(tǒng)一同傾轉(zhuǎn),大大提高了升力效率[8]。且對于電驅(qū)動傾轉(zhuǎn)翼飛機(jī)而言,主要依靠電機(jī)轉(zhuǎn)速和偏轉(zhuǎn)傾轉(zhuǎn)段機(jī)翼和舵面來保持其垂直起降段的姿態(tài)[9],其結(jié)構(gòu)簡單,研發(fā)、維護(hù)等成本有所降低,同時(shí)還具有相對較高的可靠性[10]。只要保證其垂直起降狀態(tài)、過渡段狀態(tài)以及平飛狀態(tài)的穩(wěn)定性,它就具有了實(shí)用價(jià)值。
傾轉(zhuǎn)翼飛機(jī)的飛行分為平飛模式、垂直起降模式和過渡段模式三種[11],其中在垂直起降和過渡段模式下,航向和橫向的控制方式耦合在一起,使飛行器處在一個(gè)時(shí)變、強(qiáng)耦合、非線性階段[12]。
鄭光延等[13]針對傾轉(zhuǎn)翼飛機(jī)過渡段模式飛行時(shí)動力學(xué)特性呈現(xiàn)出的強(qiáng)非線性和強(qiáng)耦合的特點(diǎn),發(fā)現(xiàn)傳統(tǒng)的PID控制方法難以設(shè)計(jì)其控制參數(shù)并實(shí)現(xiàn)定高控制。將遺傳算法和PID控制理論相結(jié)合,基于遺傳算法整定獲得全局最優(yōu)的PID控制參數(shù)以保證良好的定高控制效果。仿真試驗(yàn)結(jié)果表明經(jīng)遺傳算法整定參數(shù)后的PID控制能夠更好地實(shí)現(xiàn)對傾轉(zhuǎn)翼飛機(jī)過渡段的定高飛行控制。楊龍飛等[14]針對傾轉(zhuǎn)翼飛機(jī)過渡段時(shí)變,強(qiáng)耦合,非線性等特點(diǎn),基于數(shù)據(jù)驅(qū)動的無模型自適應(yīng)控制理論為其過渡段設(shè)計(jì)飛行控制器;并使用粒子群優(yōu)化算法解決無模型自適應(yīng)控制器調(diào)整參數(shù)的問題。仿真結(jié)果表明,基于數(shù)據(jù)驅(qū)動的無模型自適應(yīng)控制器可實(shí)現(xiàn)傾轉(zhuǎn)翼飛機(jī)過渡段平穩(wěn)飛行,同時(shí)也證明了基于數(shù)據(jù)驅(qū)動的無模型自適應(yīng)控制方法在處理時(shí)變、強(qiáng)耦合的非線性系統(tǒng)時(shí)具有其獨(dú)特的優(yōu)勢。余雨韓[15]通過一些假設(shè),將傾轉(zhuǎn)翼飛機(jī)模型簡化為縱向非線性仿真模型,以此為基礎(chǔ)來研究縱向控制。對建立的傾轉(zhuǎn)翼飛機(jī)非線性仿真模型做配平分析,設(shè)計(jì)轉(zhuǎn)換通道。將非線性模型進(jìn)行線性化處理,分析其過渡段飛行的縱向穩(wěn)定性,分析結(jié)果表明過渡段模式下的傾轉(zhuǎn)翼飛機(jī)能夠在固定高度飛行時(shí)保持穩(wěn)定。采用的是經(jīng)典PID控制理論,分別針對飛機(jī)的俯仰角、飛行高度和飛行速度設(shè)計(jì)了三個(gè)控制器。通過仿真驗(yàn)證控制效果,控制方案可行。之后用極點(diǎn)配置法來設(shè)計(jì)縱向控制系統(tǒng)。通過仿真驗(yàn)證控制效果,效果良好,能夠滿足過渡段定高飛行和俯仰穩(wěn)定的要求。最后加入對傾轉(zhuǎn)翼飛機(jī)過渡段模式非線性模型的控制,使用PID控制對非線性模型進(jìn)行研究。通過仿真驗(yàn)證效果,對各飛行參數(shù)的控制能夠滿足過渡段定高飛行和俯仰平衡的要求。王琦等[16]為滿足傾轉(zhuǎn)翼飛機(jī)從直升機(jī)模式到固定翼模式過渡飛行的定高控制需求,對縱向通道進(jìn)行分析并建立了過渡段縱向的非線性數(shù)學(xué)模型。按照定高飛行的要求,對過渡段飛行進(jìn)行配平研究并設(shè)計(jì)了轉(zhuǎn)換通道。最后對模型線性化進(jìn)行模態(tài)分析,分析結(jié)果表明該傾轉(zhuǎn)翼飛機(jī)過渡段是穩(wěn)定的。張玉婷等[17]引入一種不需要精確數(shù)學(xué)模型參數(shù)的模糊控制方法,結(jié)合經(jīng)典PID控制的方式,實(shí)現(xiàn)對過渡段模式的控制。對于模型較復(fù)雜、參數(shù)不確定的傾轉(zhuǎn)旋翼機(jī),將模糊控制器與PID控制器結(jié)合,融入人工經(jīng)驗(yàn),可有效避免參數(shù)不確定給系統(tǒng)帶來的災(zāi)難,模糊控制方法可以很快地追蹤到給定值,帶來較為理想的控制效果。
目前,關(guān)于傾轉(zhuǎn)翼飛機(jī)過渡段的前序研究均是在仿真的基礎(chǔ)上進(jìn)行的,以定高和縱向控制為主,通過旋翼拉力和傾轉(zhuǎn)段機(jī)翼傾轉(zhuǎn)角度的調(diào)節(jié),來保證無人機(jī)在過渡段的高度穩(wěn)定。但都未曾針對飛機(jī)在過渡段的橫側(cè)向運(yùn)動有過相關(guān)控制方法的研究。
而由于傾轉(zhuǎn)段機(jī)翼面積較大,在垂直起降模式和過渡段模式下,容易受到外加干擾,發(fā)生偏航和橫滾,而靠電機(jī)拉力和襟副翼偏轉(zhuǎn)能否實(shí)現(xiàn)對飛機(jī)的控制呢?因此,對傾轉(zhuǎn)翼飛機(jī)的橫側(cè)向可控性能進(jìn)行研究、分析是非常必要的。
本文將建立傾轉(zhuǎn)翼無人機(jī)過渡段力學(xué)模型,進(jìn)行分析、求解,并對航向可控性進(jìn)行分析。
1 傾轉(zhuǎn)翼飛行器模式簡述
1.1 平飛模式
平飛模式完全等同于普通雙發(fā)固定翼飛機(jī),升降舵、方向舵和襟副翼分別或聯(lián)動控制了其俯仰、偏航和橫滾。
1.2 垂直起降模式
在垂直起降模式下,可將傾轉(zhuǎn)翼飛機(jī)視作一架并列式雙旋翼直升機(jī)。
通過兩側(cè)旋翼轉(zhuǎn)速的改變從而改變拉力,控制其橫滾,并可使飛行器向左或向右側(cè)飛;在螺旋槳的滑流下,通過傾轉(zhuǎn)段機(jī)翼偏轉(zhuǎn)和兩側(cè)襟副翼的差動,產(chǎn)生向前或向后的附加升力,形成力矩從而控制其航向偏轉(zhuǎn);由于重心在傾轉(zhuǎn)軸下方,傾轉(zhuǎn)段機(jī)翼向前或向后偏轉(zhuǎn),可控制飛機(jī)俯仰,同時(shí)通過襟副翼同向偏轉(zhuǎn),改變翼型彎度,獲得附加升力,以抵消螺旋槳拉力產(chǎn)生的水平分力,也可使飛行器低速向前或者向后飛行,如圖1所示。

圖1 傾轉(zhuǎn)翼無人機(jī)驗(yàn)證模型
1.3 過渡模式
飛機(jī)垂直爬升到一定高度后,隨著傾轉(zhuǎn)段機(jī)翼及與其一同偏轉(zhuǎn)的螺旋槳?jiǎng)恿ο到y(tǒng)向前傾轉(zhuǎn),直至達(dá)到平飛狀態(tài)[18],或由平飛模型返回到垂直起降模式,即為過渡模式[19]。期間從垂直起降模式開始偏轉(zhuǎn)時(shí),由于速度低,尾翼舵效基本為零,因此控制方式與垂直起降模式基本一致更容易受到橫側(cè)向干擾。
2 建模與分析
由于在垂直起降模式和接近垂直起降狀態(tài)下(起飛過渡段初始狀態(tài)),速度較低,所有操控力基本來自傾轉(zhuǎn)段機(jī)翼及螺旋槳拉力,因此本文只需建立傾轉(zhuǎn)段機(jī)翼受力模型即可。
如圖2所示,當(dāng)副翼向上或者向下偏轉(zhuǎn)時(shí),傾轉(zhuǎn)段翼型彎度改變,其在螺旋槳滑流作用下的升力系數(shù)會隨之改變,從而產(chǎn)生向下或者向上的一個(gè)附加升力,用ΔL表示;電機(jī)轉(zhuǎn)速改變的同時(shí),螺旋槳拉力也需隨之改變,產(chǎn)生的附加拉力用ΔT表示。

圖2 傾轉(zhuǎn)段機(jī)翼受力簡圖
2.1 受力特性簡析
當(dāng)發(fā)生向左偏航時(shí),需要產(chǎn)生一個(gè)向右的力矩,使其恢復(fù)到正常航向,因此需要左側(cè)襟副翼后(上)偏,右側(cè)襟副翼前(下)偏,左側(cè)電機(jī)拉力增大,右側(cè)電機(jī)拉力減小。此時(shí)以左側(cè)傾轉(zhuǎn)段機(jī)翼受力為例進(jìn)行分析,左側(cè)傾轉(zhuǎn)段機(jī)翼受力如圖3所示。
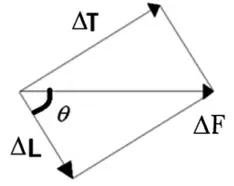
圖3 左側(cè)傾轉(zhuǎn)段受力示意圖
由于飛控響應(yīng)時(shí)間滯后以及其他因素的影響,合力ΔF可能會產(chǎn)生一個(gè)微小的豎直分量。但鑒于本文只討論航向控制問題,因此暫不考慮豎直分量的影響,認(rèn)為左右兩側(cè)傾轉(zhuǎn)段機(jī)翼產(chǎn)生的合力大小相等、方向相反。即飛機(jī)不產(chǎn)生俯仰和橫向運(yùn)動。
2.2 航向偏航力矩的估算
假設(shè)飛機(jī)在垂直起降模式下或接近垂直起降的狀態(tài)下受到外部氣流干擾產(chǎn)生偏航力矩,進(jìn)而產(chǎn)生大小為1rad/s2的角加速度。
即飛機(jī)受外部氣流干擾所產(chǎn)生的偏航角速度α=1rad/s2,由理論力學(xué)可知,飛機(jī)受外部氣流干擾產(chǎn)生的偏航力矩M=Jα,若可求得飛機(jī)轉(zhuǎn)動慣量J,便可得飛機(jī)所受力矩,文獻(xiàn)[20]給出了飛機(jī)轉(zhuǎn)動慣量的估算公式(圖4)。

圖4 飛機(jī)質(zhì)量特性計(jì)算坐標(biāo)系
對于大展弦比平直翼飛機(jī),其轉(zhuǎn)動慣量估算公式如下:

其中:W為飛機(jī)質(zhì)量,單位為kg;b為飛機(jī)機(jī)翼展長,單位為m;l為飛機(jī)機(jī)身總長,單位為m;h為機(jī)身最大切面的高度,單位為m。
本次使用的傾轉(zhuǎn)翼無人機(jī)驗(yàn)證機(jī)尺寸及重量等參數(shù)如表1。

表1 驗(yàn)證機(jī)模型參數(shù)表
將數(shù)據(jù)帶入轉(zhuǎn)動慣量估算公式,則可得飛機(jī)繞Z軸的轉(zhuǎn)動慣量:

由此可得,偏航力矩:

即飛機(jī)受外部氣流干擾所產(chǎn)生的偏航力矩大小約為0.21N·m。
3 抗干擾力矩的計(jì)算
文獻(xiàn)[7]給出了傾轉(zhuǎn)翼無人機(jī)在過渡段的旋翼轉(zhuǎn)速變化趨勢圖,如圖5。
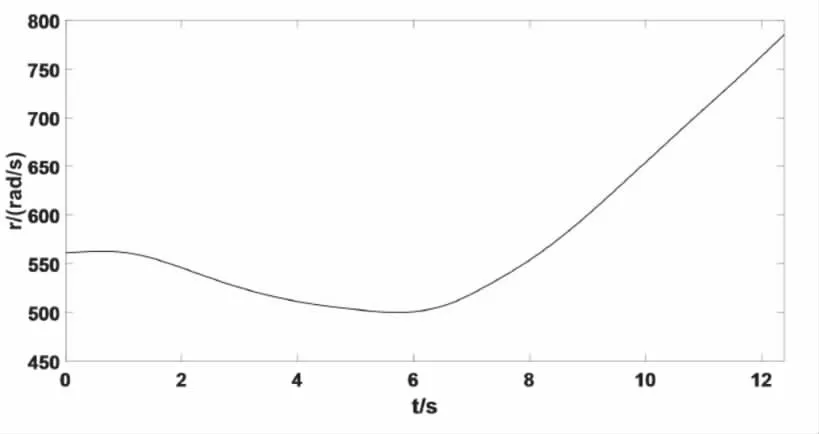
圖5 無人機(jī)過渡段旋翼轉(zhuǎn)速變化
可看出在整個(gè)過渡段初期,旋翼轉(zhuǎn)速稍有下降,然后逐漸增大,直到轉(zhuǎn)化為普通固定翼的平飛模式,而螺旋槳產(chǎn)生的滑流風(fēng)速也遵循這個(gè)趨勢,即滑流風(fēng)速略有減小后逐漸增大。
本實(shí)驗(yàn)所用無人機(jī)模型裝載電機(jī)型號為朗宇2820,KV值為570(KV表示電機(jī)空載狀態(tài)下每增加1V電壓時(shí),轉(zhuǎn)速的增量),表2為朗宇官方給出的此款電機(jī)力效表。

表2 朗宇2820電機(jī)KV570力效表
由表2可知,當(dāng)KV值為570的朗宇2820電機(jī)搭配1265槳在轉(zhuǎn)速達(dá)到7138轉(zhuǎn)左右時(shí)可產(chǎn)生1500g的拉力,由于本次實(shí)驗(yàn)的模型機(jī)裝載螺旋槳型號為1260,槳距低于1265的螺旋槳,故在7138轉(zhuǎn)時(shí)產(chǎn)生的拉力略低于1500g,可近似認(rèn)為單個(gè)電機(jī)搭配1260螺旋槳可產(chǎn)生1400g的拉力,兩個(gè)電機(jī)合計(jì)產(chǎn)生2800g拉力可使飛機(jī)在空中處于懸停狀態(tài)。
將電機(jī)搭配1260槳,對其進(jìn)行風(fēng)速測量,實(shí)驗(yàn)設(shè)備如圖6。

圖6 風(fēng)速測量
搭配轉(zhuǎn)速計(jì),將電機(jī)轉(zhuǎn)速調(diào)整至7000~7100轉(zhuǎn),此時(shí)測得螺旋槳滑流的風(fēng)速在15.6~16.3m/s之間。可近似認(rèn)為,在整個(gè)過渡段中,1260螺旋槳所產(chǎn)生的滑流風(fēng)速最小值約為15m/s。
接下來將機(jī)翼最外側(cè)傾轉(zhuǎn)段取下,如圖7,放至風(fēng)洞進(jìn)行下一步實(shí)驗(yàn)。
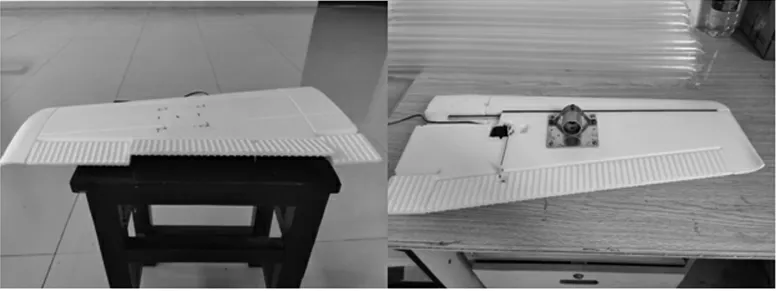
圖7 機(jī)翼最外側(cè)傾轉(zhuǎn)段
將該部分機(jī)翼固定至風(fēng)洞,機(jī)翼迎角約為-2°,與電機(jī)滑流同機(jī)翼迎角相同,在15m/s的風(fēng)速條件下,分別測得副翼不偏轉(zhuǎn)和副翼上偏至最大位置以及下偏至最大位置的升力系數(shù),如圖8。

圖8 風(fēng)洞實(shí)驗(yàn)
實(shí)驗(yàn)測得三組升力系數(shù),如表3。取其平均值做后續(xù)計(jì)算依據(jù),即副翼未動時(shí)CL為0.078975,副翼上偏時(shí)CL為0.058475,副翼下偏時(shí)CL為0.0998875。
即副翼向上偏轉(zhuǎn)時(shí)產(chǎn)生的附加升力至少可以達(dá)到0.299N,副翼向下偏轉(zhuǎn)時(shí)產(chǎn)生的附加升力至少可以達(dá)到0.305N,同取兩邊最小值0.299N。暫假設(shè)該附加載荷作用點(diǎn)位于螺旋槳中心位置,即力臂長度為固定段機(jī)翼長度加上兩側(cè)電機(jī)固定點(diǎn)至傾轉(zhuǎn)段內(nèi)側(cè)長度,本模型力臂長度為d=0.9m。由圖3可知,ΔF=ΔLcosθ+ΔTsinθ,θ由0到π/2逐漸增大,ΔLcosθ逐漸減小,ΔTsinθ逐漸增大。ΔT為電機(jī)的主動力,由表3可知最大值超過10N,ΔL為副翼偏轉(zhuǎn)產(chǎn)生的氣動力,其值較小,由表4和表5可知,最大值僅約為0.3N。

表3 升力系數(shù)表

表4 副翼上偏時(shí)升力差值

表5 副翼下偏時(shí)升力差值
當(dāng)θ為0時(shí),飛機(jī)受外界干擾而成的偏航力矩,要抵抗該力矩的力ΔF全由偏轉(zhuǎn)副翼提供,最大值約0.3N,隨著θ逐漸增大至π/2,ΔF最大值逐漸增大,最大值超過10N。即在θ=0時(shí),外界氣流干擾產(chǎn)生的偏航力矩最大。
θ=0時(shí),由副翼偏轉(zhuǎn)產(chǎn)生的最大附加偏航力矩M=ΔF·d=0.299×0.9=0.2691(N·m)>0.21(N·m)。
由此,在垂直起降模式下,或者說在起飛過渡段初始狀態(tài)下,最大附加偏航力矩大于受外界氣流干擾產(chǎn)生的最大偏航力矩,故在整個(gè)過渡段中,可以通過附加偏航力矩對外界干擾產(chǎn)生的偏航予以控制。
4 結(jié)論
本文對傾轉(zhuǎn)翼無人機(jī)在過渡段進(jìn)行力學(xué)建模,并進(jìn)行一系列實(shí)驗(yàn),對其進(jìn)行力學(xué)分析并求解,結(jié)果證明通過旋翼和副翼的共同調(diào)節(jié),在垂直起降狀態(tài)下(θ=0),可產(chǎn)生因副翼偏轉(zhuǎn)引起的附加偏航力矩最小,且該值大于飛機(jī)在1rad/s2的偏航角加速度極限條件下的最大值,故飛機(jī)在過渡段極限偏航狀態(tài)下的航向是可控的,用同樣的方法可以證明橫滾也是可控的,因此證明了該結(jié)構(gòu)的傾轉(zhuǎn)翼無人機(jī)在現(xiàn)實(shí)中是可行的。
猜你喜歡
青少年科技博覽(中學(xué)版)(2022年6期)2022-08-31 09:03:40
小哥白尼(軍事科學(xué))(2022年3期)2022-06-09 03:11:24
環(huán)球時(shí)報(bào)(2022-05-30)2022-05-30 15:16:57
小哥白尼(趣味科學(xué))(2020年12期)2021-01-18 06:15:26
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2020-11-27 17:34:02
青少年科技博覽(中學(xué)版)(2020年2期)2020-05-21 03:35:16
當(dāng)代陜西(2019年11期)2019-06-24 03:40:28
百科探秘·航空航天(2017年11期)2017-12-20 07:31:34
百科探秘·航空航天(2017年12期)2017-08-15 00:55:45
作文周刊·小學(xué)一年級版(2017年9期)2017-06-20 00:19:33