電動(dòng)汽車雙向DC/DC變換器的仿真與實(shí)現(xiàn)
2021-08-09 06:29:58左順文蘇晉濤宋仕濤
電子制作 2021年15期
關(guān)鍵詞:單片機(jī)
左順文,蘇晉濤,宋仕濤
(南京郵電大學(xué)自動(dòng)化人工智能學(xué)院,江蘇南京,210023)
0 引言
雙向DC/DC變換器是一種能實(shí)現(xiàn)直流電能雙向流動(dòng),同時(shí)維持變換器兩端的直流電壓極性不變的裝置[1]。其基本原理是通過(guò)由三角波調(diào)制的PWM波控制功率開(kāi)關(guān)(MOSFET,場(chǎng)效應(yīng)管等)進(jìn)行高頻開(kāi)斷,構(gòu)成Buck/Boost斬波電路,將輸入的電能貯存在電容、電感等儲(chǔ)能元件中。當(dāng)開(kāi)關(guān)斷開(kāi)時(shí),電容或電感中的能量被釋放,為負(fù)載電機(jī)提供能量。其主要應(yīng)用于混合動(dòng)力汽車、新能源發(fā)電、直流不間斷供電、分布式發(fā)電系統(tǒng)等領(lǐng)域[2]。在電動(dòng)汽車行駛過(guò)程中,由于其速度頻繁變化,導(dǎo)致蓄電池電壓的波動(dòng)范圍較大,不適合采用此電壓直接驅(qū)動(dòng)直流電機(jī)。利用雙向DC/DC變換器的閉環(huán)控制,能實(shí)時(shí)調(diào)整電動(dòng)汽車逆變器直流一側(cè)的電壓與電機(jī)轉(zhuǎn)速相適應(yīng),從而減小電機(jī)電流的紋波,改善電機(jī)的驅(qū)動(dòng)性能。當(dāng)汽車制動(dòng)時(shí),能量還可通過(guò)變換器反向流動(dòng)至蓄電池,對(duì)蓄電池進(jìn)行充電,實(shí)現(xiàn)能量的重復(fù)利用。
本文的主要工作是介紹雙向半橋式DC/DC變換器的兩種工作模式,根據(jù)設(shè)計(jì)指標(biāo)計(jì)算電路各元件參數(shù),在Matlab/Simulink中對(duì)兩種工作模式進(jìn)行模擬仿真,在此基礎(chǔ)上搭建樣機(jī)進(jìn)行測(cè)試研究。
1 電路結(jié)構(gòu)與工作原理
1.1 變換器的拓?fù)浣Y(jié)構(gòu)
雙向半橋式DC/DC變換器的拓?fù)浣Y(jié)構(gòu)如圖1所示。電路由Buck、Boost斬波電路組合而成。其中功率開(kāi)關(guān)1V和2V以互補(bǔ)方式工作。當(dāng)電動(dòng)汽車處于正常行駛狀態(tài)時(shí),蓄電池向電動(dòng)機(jī)供電,雙向DC/DC變換器成為Boost變換器,蓄電池的電壓被升高以提供給逆變器一個(gè)穩(wěn)定的直流電壓,逆變器將DC轉(zhuǎn)為AC從而驅(qū)動(dòng)交流電機(jī);當(dāng)電動(dòng)汽車剎車時(shí),電機(jī)的轉(zhuǎn)子速度超過(guò)電機(jī)同步磁場(chǎng)的旋轉(zhuǎn)速度,轉(zhuǎn)子繞組所產(chǎn)生的電磁轉(zhuǎn)矩的旋轉(zhuǎn)方向和轉(zhuǎn)子的旋轉(zhuǎn)方向相反,電動(dòng)機(jī)處在再生制動(dòng)狀態(tài)[3]。此時(shí)電動(dòng)機(jī)發(fā)電,雙向DC/DC變換器成為Buck變換器,能量反向流動(dòng),逆變器一側(cè)的直流電壓被降低,從而對(duì)蓄電池進(jìn)行安全充電。此種結(jié)構(gòu)無(wú)電氣隔離,元件數(shù)量較少,體積小,控制方式簡(jiǎn)單。
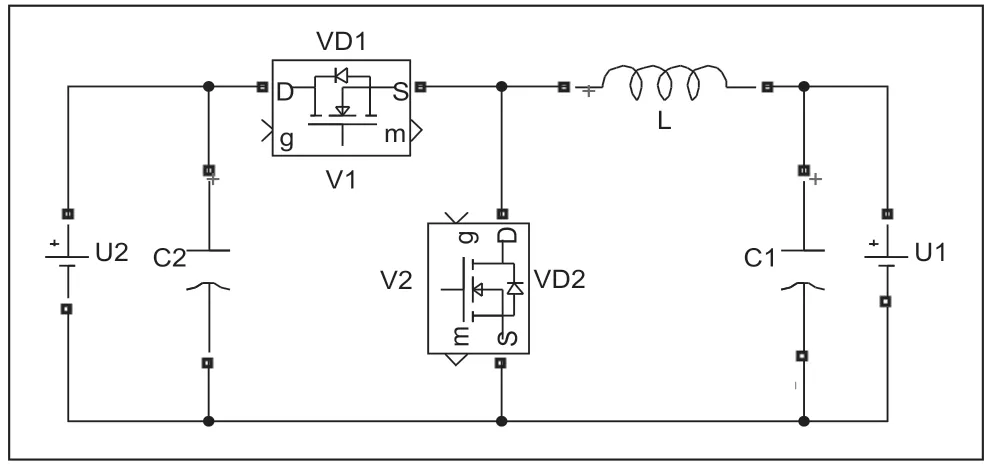
圖1 雙向半橋式DC/DC變換器
1.2 正向Boost工作模式
正向Boost工作模式如圖2所示。此時(shí)U1為輸入端,U2為輸出端,能量由U1一側(cè)向U2一側(cè)流動(dòng),變換器工作在Boost升壓模式。1V關(guān)斷,2V由恒定頻率的PWM波驅(qū)動(dòng)。如圖2(a)所示,2V導(dǎo)通時(shí),電池組電壓U1加到電感L上,能量以磁場(chǎng)能的形式貯存在電感中,電流從右向左流動(dòng)[4]。如圖2(b)所示,2V關(guān)斷時(shí),因?yàn)殡姼须娏鳠o(wú)法突變,1V的寄生二極管V1D導(dǎo)通。隨著電流沿V1D流動(dòng),蓄電池和電感L向直流母線供能,電容C2充電,電感L釋放能量[5]。調(diào)整2V的占空比可改變U2的大小。
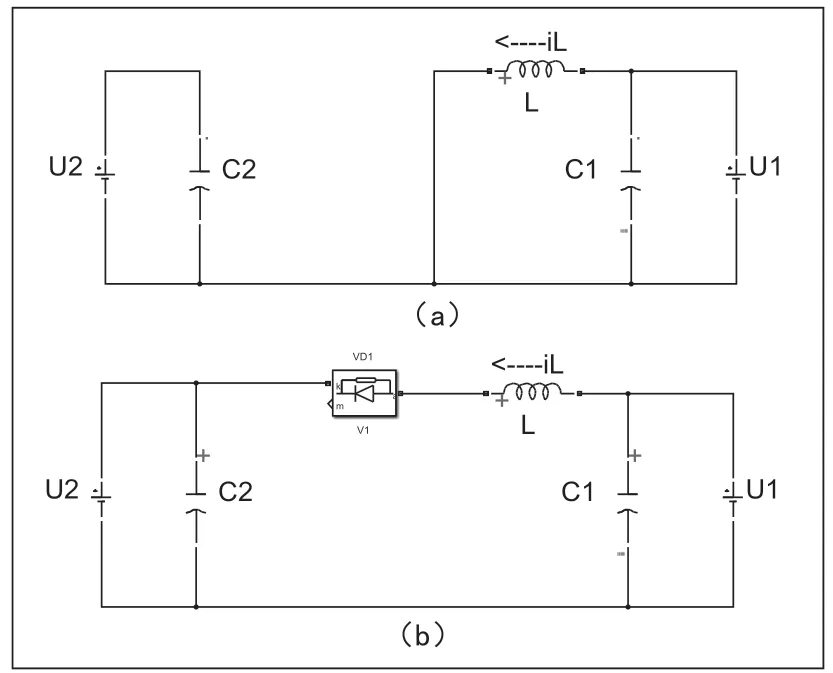
圖2 正向Boost工作模式
1.3 反向Buck工作模式
反向Buck工作模式如圖3所示。此時(shí)U2為輸入端,U1為輸出端,能量由U2一側(cè)向U1一側(cè)流動(dòng),變換器工作在Buck降壓模式。V2關(guān)斷,V1由恒定頻率的PWM波驅(qū)動(dòng)。如圖3(a)所示,1V導(dǎo)通時(shí),U2加到V2D、電感L和電容1C上,所以V2D截止,電機(jī)制動(dòng)時(shí)產(chǎn)生的電能轉(zhuǎn)化為磁場(chǎng)能貯存在電感中,電流從左向右流動(dòng),同時(shí)對(duì)蓄電池充電。如圖3(b)所示,1V關(guān)斷時(shí),因?yàn)殡姼须娏鳠o(wú)法突變,2V的寄生二極管V2D導(dǎo)通,加在L上的電壓變?yōu)?U1,iL線性減小,電感的能量被釋放,能量向U1轉(zhuǎn)移。
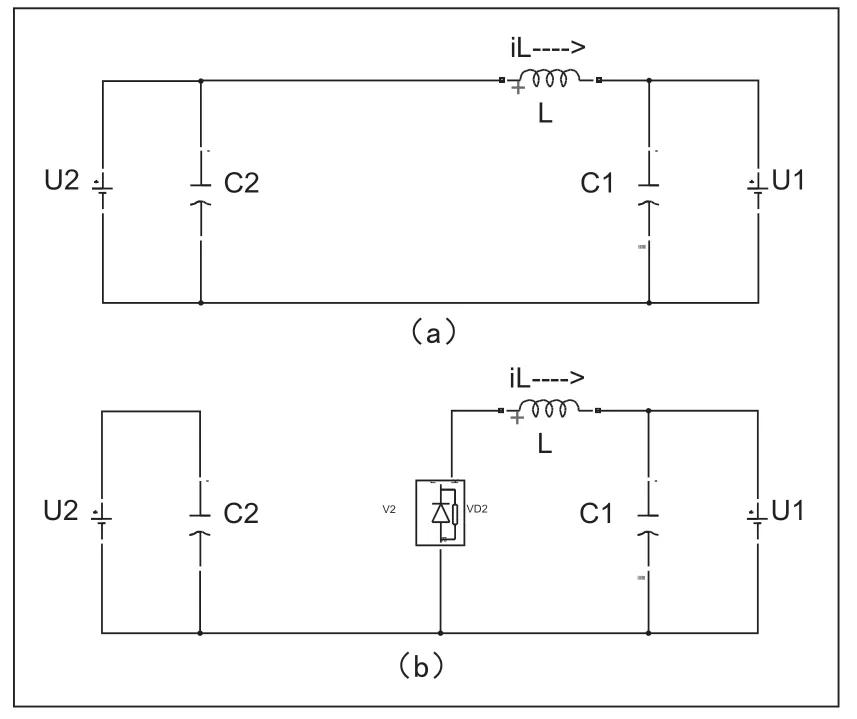
圖3 反向Buck工作模式
2 變換器的設(shè)計(jì)要求和元件參數(shù)計(jì)算
2.1 設(shè)計(jì)要求
樣機(jī)采用五節(jié)I8650型鋰離子電池作為充放電電池,30Ω電阻作為負(fù)載,通過(guò)外接直流穩(wěn)壓電源調(diào)整負(fù)載兩端的電壓。系統(tǒng)實(shí)時(shí)監(jiān)測(cè)負(fù)載兩端的電壓,并自動(dòng)切換工作模式,保持輸出電壓的相對(duì)穩(wěn)定。當(dāng)外接直流電源電壓在32~38V范圍內(nèi)變化時(shí),保持負(fù)載兩端電壓穩(wěn)定在30V,且雙向DC/DC變換電路能夠自動(dòng)切換Boost/Buck狀態(tài)。當(dāng)外接電壓<35V時(shí),電路處于正向Boost工作模式,蓄電池放電,模擬電動(dòng)汽車正常行駛的狀態(tài);當(dāng)外接電壓>35V時(shí),電路處于反向Buck工作模式,蓄電池充電,模擬電機(jī)制動(dòng)時(shí)能量回流的狀態(tài)。
系統(tǒng)部分參數(shù)如表1所示。
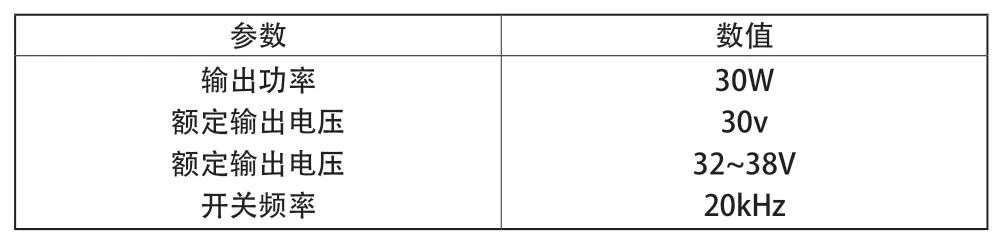
表1 系統(tǒng)部分參數(shù)
2.2 元件參數(shù)計(jì)算
(1)MOSFET開(kāi)關(guān)頻率取20kHz。
(2)Boost電路工作在電流連續(xù)狀態(tài),電感L由以下公式確定:
其中,Dmax2為最大占空比,取Uomax為最大輸出電壓,取30.5V;Iomax為最大輸出電流,取2A。可計(jì)算出電感L≥55.3Hμ。
Buck電路工作在電流連續(xù)狀態(tài),電感L由以下公式確定:
其中,Uomax為最大輸出電壓,取18.5V(每節(jié)電池3.7V);Dmax1為最大占空比,取18.5/24;常數(shù)k一般取0.05~1,這里取0.08;Iomax為最大輸出電流,取2A。可計(jì)算出電感L ≥ 0.67mH。
實(shí)際電感值可取2~3倍的臨界值,這里取L=1.5mH。
(3)電容1C可根據(jù)降壓模式下輸出紋波ΔUo的要求進(jìn)行計(jì)算,公式為:
其中, ΔUo≤ 1V ,經(jīng)計(jì)算,電容C1≥ 1.44μF。為了輸出更小的電壓紋波,可選取約10倍的臨界值,這里取C1= 10μF。
電容C2可根據(jù)升壓模式下輸出紋波ΔUo的要求進(jìn)行計(jì)算,公式為:
其中, ΔUo≤ 1V ,經(jīng)計(jì)算,電容C2≥ 0.39mF 。為了輸出更小的電壓紋波,可選取約10倍的臨界值[6],這里取C2= 3mF。
3 Simulink仿真模擬
根據(jù)以上計(jì)算得到的元件參數(shù),在Simulink中搭建雙向變換器的仿真模型如圖4所示。
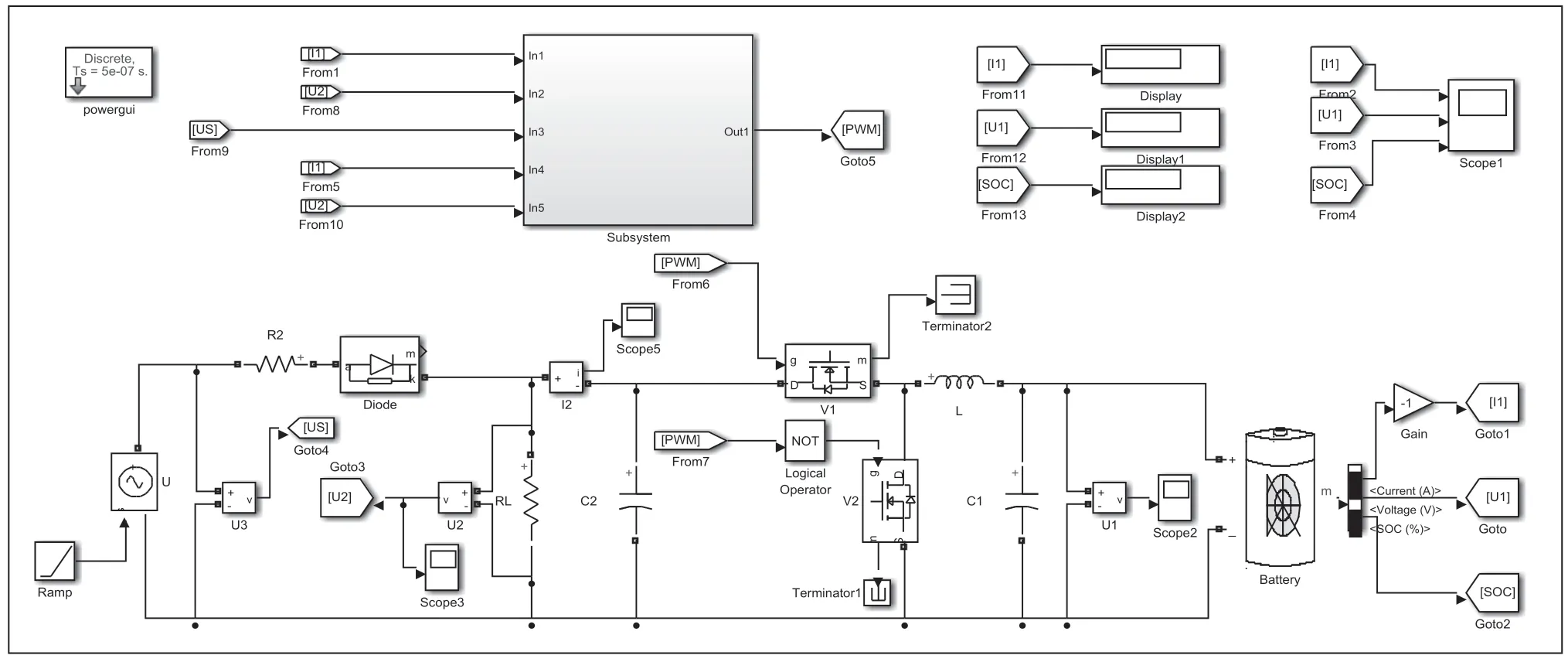
圖4 仿真模型
Battery模塊設(shè)置為鋰電池,額定電壓18.5V,額定容量15A·H,初始充電狀態(tài)為50%。仿真步長(zhǎng)設(shè)置為默認(rèn)的可變自動(dòng)步長(zhǎng)(VariableStepAuto)。外接直流電源為一斜坡函數(shù),從32V起線性增大至38V。仿真時(shí)間設(shè)置為10秒。
Subsystem子模塊為系統(tǒng)的控制模塊,模擬實(shí)際系統(tǒng)中的單片機(jī)。如圖5(a)所示。采用雙閉環(huán)結(jié)構(gòu):外環(huán)為電壓環(huán),用以調(diào)整輸出電壓使之跟隨給定;內(nèi)環(huán)為電流環(huán),用以使電流的輸出快速跟隨輸入。電流內(nèi)環(huán)采用P控制器,設(shè)置為10,滿足快速性的要求,電壓外環(huán)采用PI控制器,P設(shè)置為10000,I設(shè)置為1,滿足穩(wěn)定輸出的要求。三角載波的頻率為20kHz,幅值為30V。
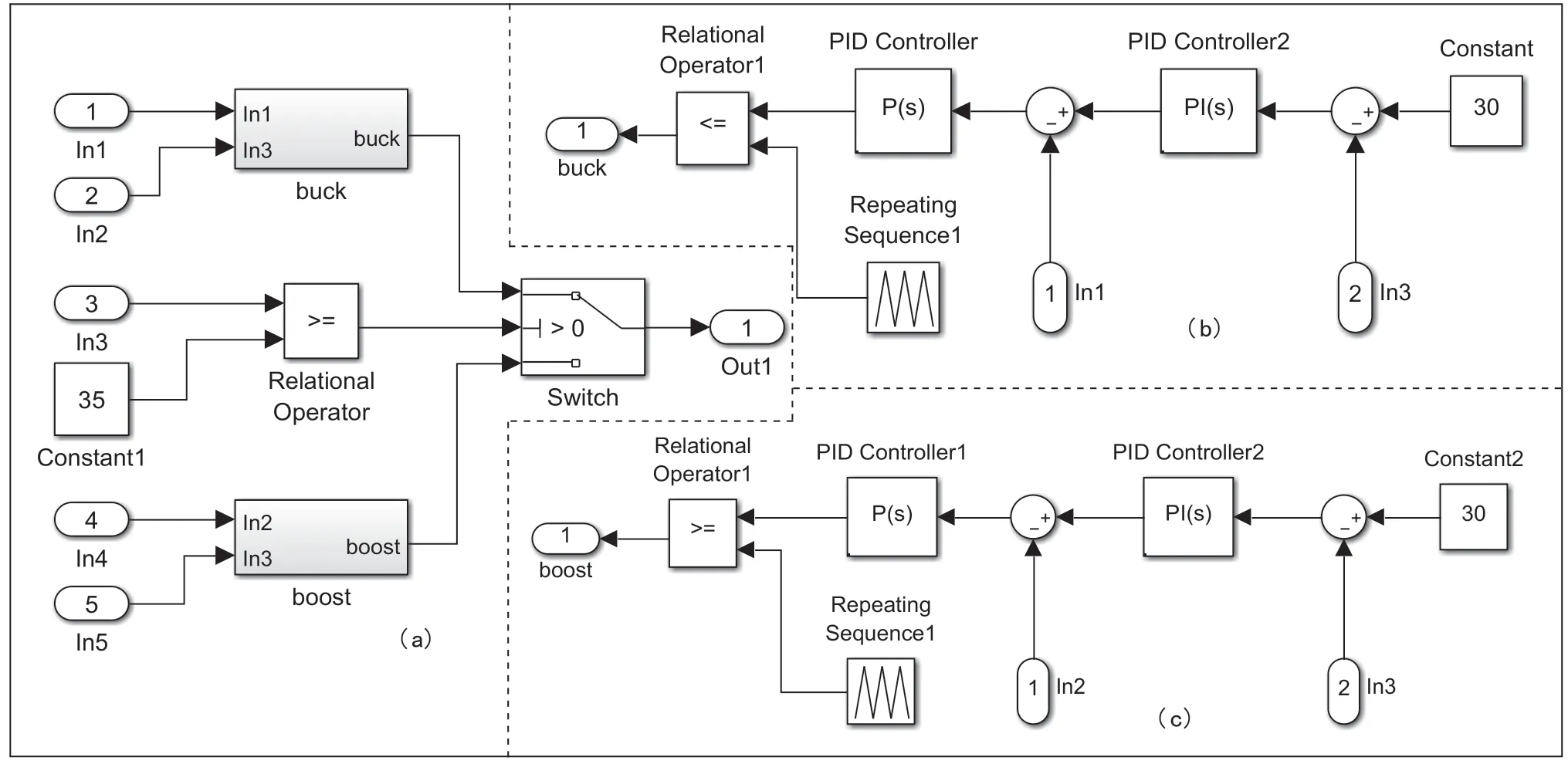
圖5 Subsystem子模塊
圖6 (a)~圖6(c)分別是外接直流電源電壓取32、35、38V時(shí),負(fù)載兩端的電壓穩(wěn)定時(shí)的波形。可見(jiàn)基本穩(wěn)定在30V左右。
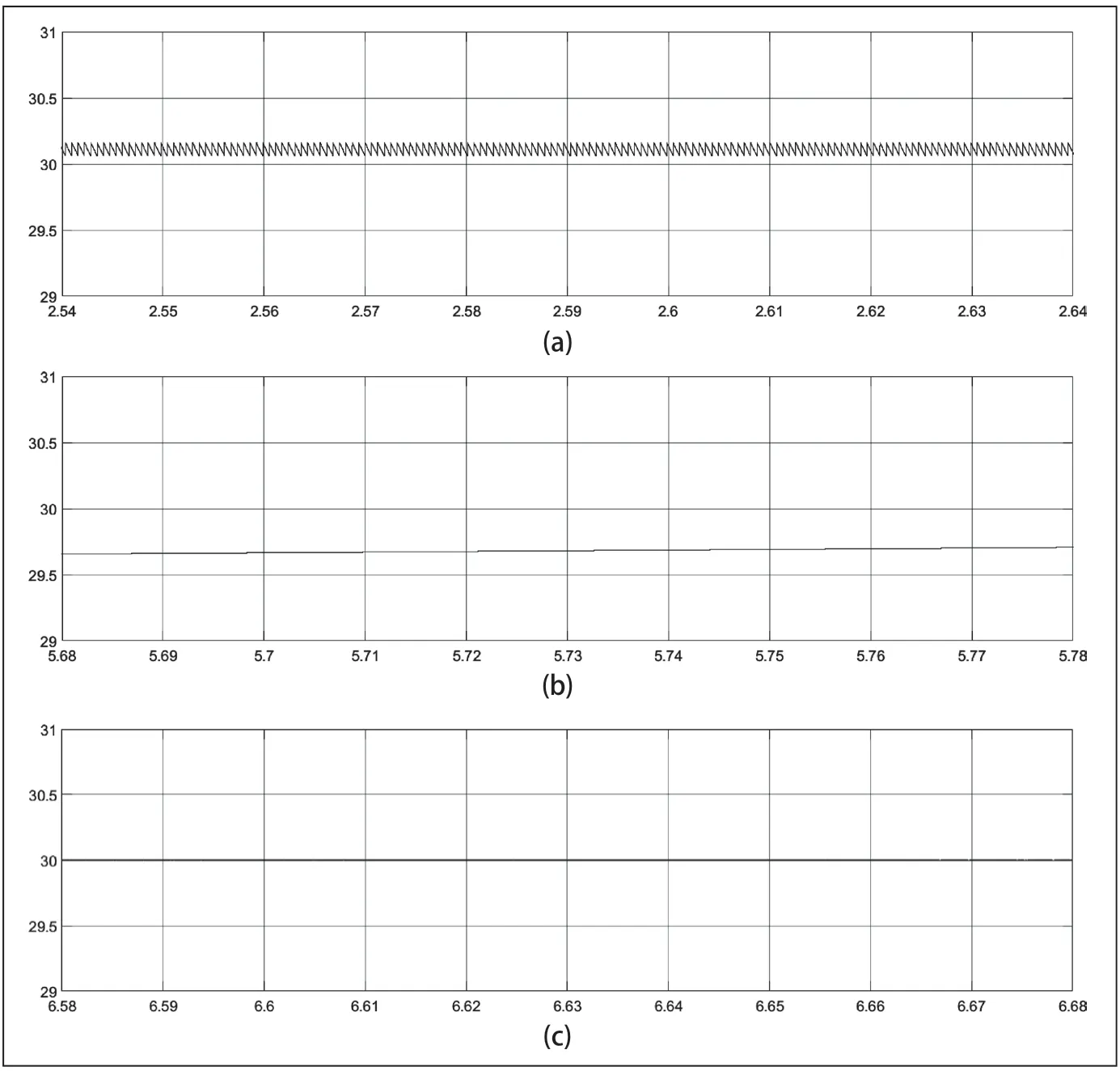
圖6 負(fù)載兩端電壓波形
4 雙向DC/DC變換器的系統(tǒng)結(jié)構(gòu)
在理論分析和模擬仿真的基礎(chǔ)上設(shè)計(jì)了一臺(tái)以STC12C5A60S2單片機(jī)為控制核心的數(shù)控雙向DC/DC變換器系統(tǒng)。STC12C5A60S2/AD/PWM系列單片機(jī)是STC生產(chǎn)的單時(shí)鐘/機(jī)器周期(1T)的單片機(jī),是高速/低功耗/超強(qiáng)抗干擾的新一代8051單片機(jī),指令代碼完全兼容傳統(tǒng)8051,但速度快8-12倍,內(nèi)部集成MAX810專用復(fù)位電路,2路PWM,8路高速10位A/D轉(zhuǎn)換(250K/S,即25萬(wàn)次/秒),針對(duì)電機(jī)控制,強(qiáng)干擾場(chǎng)合[7]。
系統(tǒng)結(jié)構(gòu)圖如圖7所示。
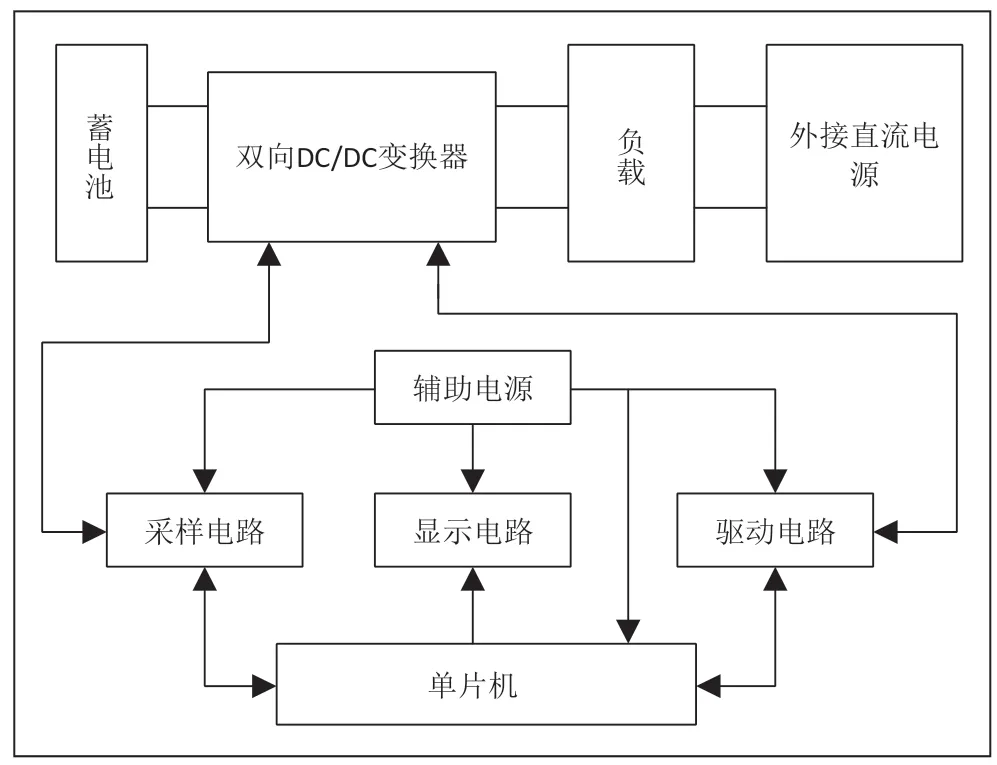
圖7 系統(tǒng)結(jié)構(gòu)圖
系統(tǒng)主要由雙向DC/DC變換器電路、蓄電池、負(fù)載、外接直流電源、采樣電路、半橋驅(qū)動(dòng)電路、控制核心(單片機(jī))、顯示電路和輔助電源組成。采樣電路分為電壓采樣和電流采樣。2512/2w的精密采樣電阻接在蓄電池和地之間,用以采集母線電流。電壓采樣由OP07A芯片構(gòu)成差分放大電路,目的是將母線電流采樣電阻得到的信號(hào)轉(zhuǎn)換成電壓信號(hào)并進(jìn)行放大處理。蓄電池和直流電源輸入兩側(cè)的電壓采樣較為簡(jiǎn)單,由分壓電阻分壓和電容濾波后直接送至單片機(jī)的P1.2和P1.0口。由于單片機(jī)的驅(qū)動(dòng)能力不足,故半橋驅(qū)動(dòng)電路采用IR2104芯片驅(qū)動(dòng)兩個(gè)80NF70場(chǎng)效應(yīng)管。顯示電路使用1602液晶實(shí)時(shí)顯示電壓和電流參數(shù)。輔助電源由DC-005直流電源轉(zhuǎn)接板模塊、LM7805三端穩(wěn)壓模塊和ICL7662負(fù)電源產(chǎn)生電路構(gòu)成,將市電轉(zhuǎn)換成5V、12V、-12V等電壓,給整個(gè)系統(tǒng)供電。
綜上,本系統(tǒng)采用STC12C5A60S2單片機(jī)作為控制核心,其發(fā)生20kHz的PWM波控制自帶死區(qū)的IR2104芯片驅(qū)動(dòng)MOSFET,從而控制整個(gè)雙向DC/DC變換器電路的工作狀態(tài)。電壓和電流檢測(cè)電路采集變換器兩側(cè)的電壓和電流反饋給單片機(jī)內(nèi)部的模數(shù)轉(zhuǎn)換器,實(shí)時(shí)調(diào)整PWM波的占空比。
5 系統(tǒng)軟件設(shè)計(jì)
系統(tǒng)軟件主要分為主程序、按鍵程序和ADC中斷程序。
主程序包括初始化程序和電壓電流循環(huán)檢測(cè)兩部分。初始化程序由端口功能設(shè)置、PWM初始化、ADC初始化和液晶初始化等部分組成。初始化完成后進(jìn)入電壓電流循環(huán)檢測(cè),檢測(cè)按鍵設(shè)置的功能狀態(tài),計(jì)算并顯示輸入電壓、輸出電壓和輸出電流。為了提高顯示精度,采集這些數(shù)據(jù)時(shí)一次采集大量數(shù)據(jù)并求取平均值,即平均濾波算法。
按鍵程序中,四個(gè)按鍵分別控制放電功能的開(kāi)啟/關(guān)閉、電池充電/不充電、輸出電流增大和輸出電流減小。其中電池的充電與否是通過(guò)控制IR2104的使能進(jìn)而控制Buck電路的工作與否實(shí)現(xiàn)的。按鍵還帶有延時(shí)防抖動(dòng),提高了控制精度。
ADC中斷程序中,執(zhí)行ADC采集并做電壓和電流的調(diào)整。采用通道輪流詢問(wèn)的方法檢測(cè)輸入電壓,輸出電壓,輸出電流這3個(gè)數(shù)據(jù)。
6 系統(tǒng)測(cè)試
6.1 實(shí)物圖片
系統(tǒng)由萬(wàn)用板手工焊接,如圖8所示。
圖8 系統(tǒng)實(shí)物圖
6.2 測(cè)試結(jié)果
雙向半橋DC/DC變換器樣機(jī)測(cè)試電路如圖9所示。
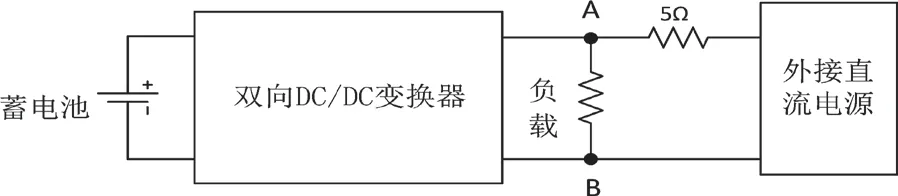
圖9 測(cè)試電路
測(cè)試前將蓄電池和30Ω負(fù)載電阻接入電路。外接直流電源接在負(fù)載和5Ω電阻兩端。外接直流電源電壓在32~38V范圍內(nèi)變化。測(cè)量AB兩點(diǎn)之間即負(fù)載兩端的電壓。
測(cè)試11組數(shù)據(jù),結(jié)果如表2所示。
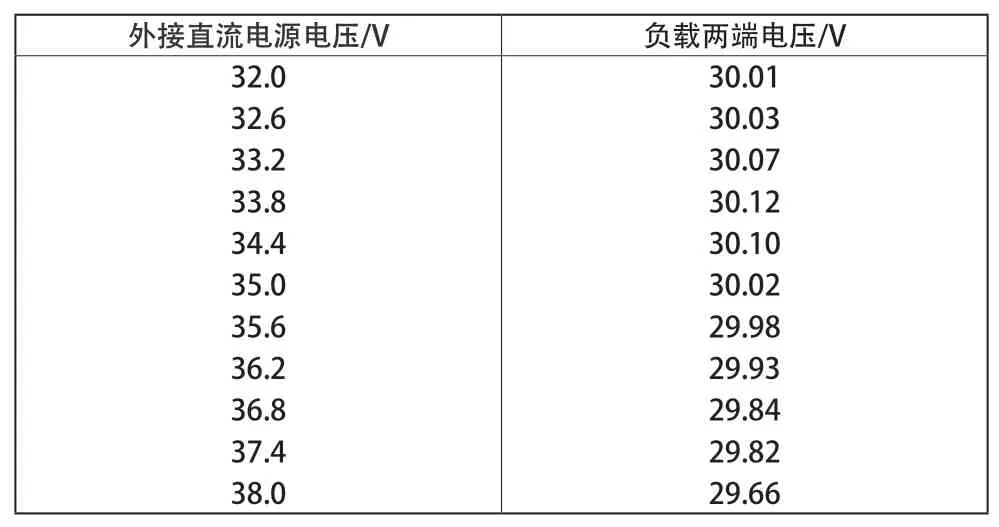
表2 測(cè)試結(jié)果
負(fù)載兩端的電壓保持在30V左右,誤差小于1.13%。
7 結(jié)束語(yǔ)
針對(duì)電動(dòng)汽車電池驅(qū)動(dòng)性能較差,能量利用效率不高的問(wèn)題,本文提出利用PWM波控制的雙向半橋DC/DC變換器穩(wěn)定逆變器一側(cè)的電壓,從而穩(wěn)定蓄電池的輸出,減小電機(jī)電流的紋波,改善驅(qū)動(dòng)性能。樣機(jī)通過(guò)改變外接直流電源的大小來(lái)模擬電動(dòng)汽車運(yùn)行時(shí)電機(jī)的不同狀態(tài),能實(shí)時(shí)顯示電壓電流等參數(shù),便于調(diào)測(cè)。經(jīng)過(guò)仿真模擬和實(shí)物測(cè)試后,效果良好,符合預(yù)期要求。
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年11期)2019-07-04 00:34:48
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年9期)2017-04-17 03:00:53
電子制作(2017年19期)2017-02-02 07:08:27
電子制作(2016年21期)2016-05-17 03:52:51
電子設(shè)計(jì)工程(2015年15期)2015-02-27 12:07:30
電子設(shè)計(jì)工程(2015年8期)2015-02-27 12:05:36
