基于Dynamo的點云BIM自動化建模
2021-08-09 00:56:38繆盾
山東建筑大學學報 2021年4期
關鍵詞:模型
繆盾
(同濟大學浙江學院 土木工程系,浙江 嘉興 314000)
0 引言
點云數據是通過三維激光掃描儀或機器視覺技術獲取的高精度、高密度、全數字化的目標物表征數據[1-2]。依靠逆向建模軟件還能將這些空間離散點處理成三維網格模型,已經成熟地應用于基礎測繪、古建保護工程中。建筑信息模型(Building Information Modeling,BIM)技術以三維建筑信息模型為核心,通過模型的分析、傳遞、共享、應用實現建筑的全生命周期管理,是建筑業信息化發展的基礎[3]。BIM的核心建模軟件Revit設置了點云鏈接功能,但是Revit對點云的處理能力還處于顯示階段,不能直接對其進行編輯和建模。而目前基于點云生成的網格模型是一類表面模型,不是具有結構特性和屬性特性的通用BIM實體模型,模型可支持的BIM應用、分析存在很大的局限性。因此,基于點云數據創建BIM模型也成為目前學者研究的熱點,大致可以分為4個研究方向:(1)通過提取點云特征線,生成二維矢量圖,導入Revit中進行手動建模。呂鳳華等[4]掃描了地鐵車站,并提取點云特征線和相關參數進行BIM建模。高溪溪等[5]將古建點云數據導入計算機輔助設計軟件(Computer Aided Design,CAD)提取特征線,生成標準圖紙,通過圖紙進行BIM建模。(2)通過中間軟件人機互動識別點云中的常規構件進行自動建模,并導出BIM兼容格式。劉立揚等[6]將點云導入點云處理軟件PointSense for Revit擬合墻面、梁柱,再導入Revit軟件;石力文等[7-8]將古建點云導入用于處理掃描點云的Revit插件(Scan for BIM)[9],對一般構件拾取表面特征點進行建模。(3)對標準件采集點云,計算全局點云特征直方圖描述子(Viewpoint Feature Histogram,VFH),建立標準件VFH庫,通過特征值分類識別構件調用族庫模型。苗亞哲等[10]建立了標準化管線的VFH庫。(4)通過二次開發對點云進行建模,陳海濤[11]研究了常規簡單構件的點云幾何形狀參數,利用二次開發工具集(Visual Studio)實現點云的BIM重建。前兩個方向是目前采用較多的方式,但是存在大量的人工作業,對模型精度有一定的干擾;方向(3)使用面較窄,適用于設備(Mechanical,Electrical&Plumbing,MEP)建模;而方向(4)可以直接編輯和建模點云,人為干擾少但對編程要求高。文章采用攝影測量的方法獲取目標物的密集點云數據,在可視化編程平臺Dynamo中對預處理后的點云進行分層編輯分段建模,實現點云自動化建模。
1 可視化編程軟件Dynamo
Dynamo是歐特克Autodesk公司推出的功能強大、使用便捷的可視化編程軟件。使用者不必一行行寫程序代碼,甚至不必掌握編程語言,通過簡單地鏈接預定義功能節點,輕松創建自己的算法[12]。Dynamo啟動與界面如圖1所示。
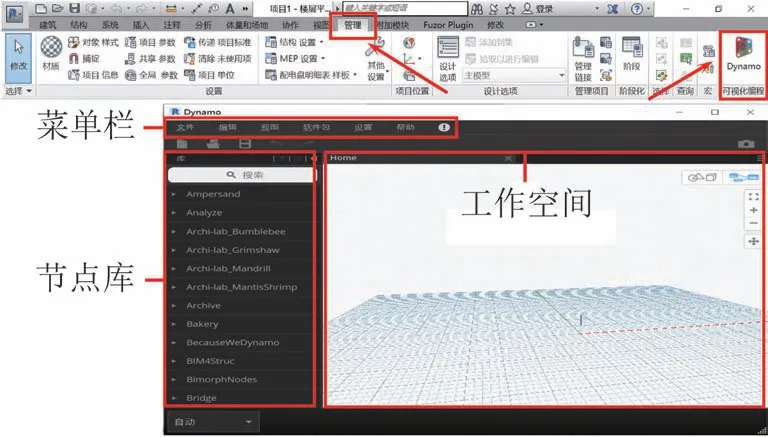
圖1 Dynamo啟動圖標與界面圖
Dynamo擁有強大的功能節點庫,包含了分析、圖形、操作、運算等8大特定功能節點類型,如圖2所示。節點與節點之間通過輸入、輸出端口連接,運行結果同步顯示在Revit中,體現了“所見即所得”的編程思想。
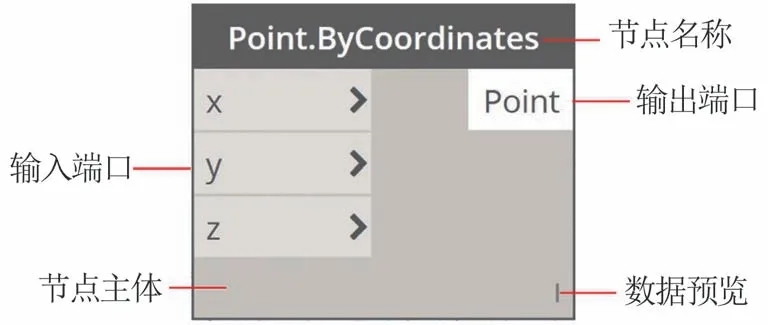
圖2 節點展示圖
2 點云BIM重建方法
點云解析了物體表面密度極高的離散點空間信息,其中包含了建模所需的特征點信息,還有大量的冗余信息,影響建模效率。同時也存在處于同一局部區域內的點云,而實體屬性是不唯一的情況,影響建模的準確性。因此,在建模之前首先需要對原始點云進行分類和分割,以色彩信息和點法矢信息分類后得到屬性唯一的構件級點云,通過點云切片分段建模的方式進行模型自動生成,具體建模思想是:(1)求點云三維度的極值分別為xmin、xmax、ymin、ymax、zmin和zmax,計算點云包圍盒表面積,再根據點云數量計算點云平均面密度;(2)在選定方向對點云進行切片,切片數n設置為輸入型參數,并計算切平面上、下一個閾值范圍內的點集;(3)將上、下點集投影至切平面求交,通過離散點擬合[13]得到n個截切邊界輪廓;(4)相鄰邊界輪廓進行放樣融合創建分段實體;(5)分段實體組合、族類別設置、材質設置以及其余實例屬性值設置。該方法對具有復雜表面的建筑構件有很好的建模表現,通過調正切片數還能得到精細化程度不同的實體模型。
2.1 點云采集和分類及其面密度計算
點云的采集方式有激光掃描和照片掃描兩種。相對于激光掃描而言,照片掃描具有更大的靈活性和便捷性[14],工作人員只需通過普通相機對目標物進行拍照,保證每兩張相片有50%的重疊度,那么通過實景掃描與三維建模軟件Agisoft Photoscan[15]即可重構重疊區的像素點,生成點云數據。在Agisoft Photoscan軟件中選擇通過顏色、紋理和法矢信息進行點云分類,得到屬性一致的點云,采集的石墩三維點云如圖3所示。

圖3 基于照片的三維點云重構圖
按照點云類別標記碼批量導出分類后的點云,其形式可選為電子表格Excel三維坐標點格式,并由Dynamo的讀取數據功能節點導入點云。搜尋點云坐標中的極大、極小值,點云包圍盒面積S由式(1)表示為
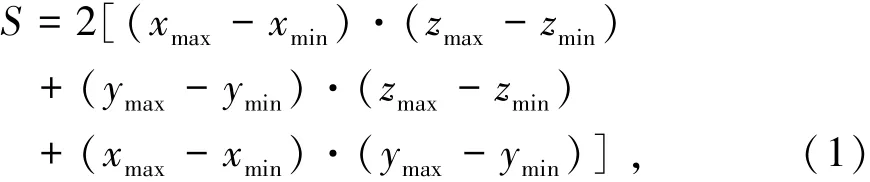
式中S為點云包圍盒面積,m2;xmin、xmax為x維度極值,m;ymin、ymax為y維度極值,m;zmin、zmax為z維度極值,m。
點云面密度δ由式(2)表示為

式中δ為點云面密度,點/m2;N為點云總量,點。
2.2 點云切片
根據點云形態確定切片的基面,如某一維度顯著大于另兩個維度,則選擇該維度的垂面為切片基面,這樣可以精確控制模型的外形。一般情況選擇z方向即高度方向為截切方向,切片為一系列平行的水平面。用戶通過滑動條控制切片數量n,每個切片的z值由式(3)表示為
為了避免切平面上的點出現局部空缺或點稀疏現象,設置點云密度δ為切片閾值,增補處理切平面上、下δ范圍內的點。切平面Q將閾值范圍內的局部點云分為上、下兩部分點集p z i+δ( )和p′z i-δ( ),將上、下點集中的點以歐式最短距離配對,如圖4所示。
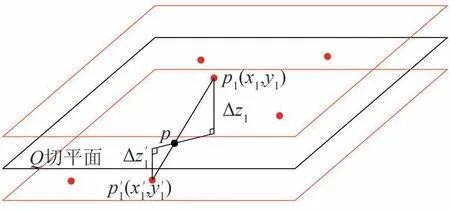
圖4 某一切平面Q的點云投射示意圖
求與上部點p1歐式距離最短的下部點p′1,則兩點連線與切平面的交點為增補點p,根據相似原理,增補點p的切平面二維坐標 (x p,y p)由式(4)表示為
依次計算得到每個切平面的點集。
2.3 切面離散點擬合
上一個步驟中得到的切面點集是無序的,對這些離散點進行曲線擬合的前提是點按正向或逆向有序排列。由于切面點集最終將擬合成一條封閉的平面回轉曲線,曲線上的某一x值或y值對應曲線上的點不唯一(除極點外),因此需對點集進行劃分,再進行坐標值對比排序,以某一個切平面xOy為例,具體步驟為:
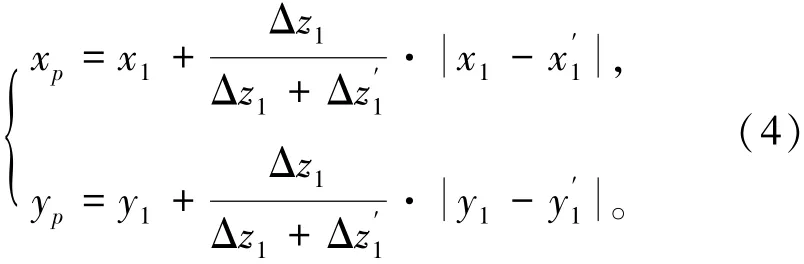
(1)求取切面點集中的x向或y向極值(文章采用x向),即求得xmin、xmax,及對應的極點p1、p2,則極點連線將點集分為兩部分,如圖5所示。
圖5 點集有序化示意圖
(2)求取極點連線方程,方程式為y=,選擇點集中下一個點p i(x i,y p i),計算x i處p1p2連線上的點g i的y g i值。
(3)比較p i點和對應g i的y值,若y p i>y g i,則該點納入列表1,若y p i<y g i,則該點納入列表2,重復第2、3步,完成所有點的分類。
(4)對列表1中的點進行正向排序,列表2中的點進行逆向排序,即列表1的點按x值從小到大排列,列表2的點反之,兩個列表合并為一個列表,則得到一個完整有序的切面點集。
3 實例應用
在Dynamo中完成點云的讀取到BIM自動建模,共設計了三維點云讀取和重采樣顯示、點云切片、實體建模和屬性賦值4大主體節點鏈。以斯坦福兔子點云數據和室外石墩的照片重建點云數據為實驗樣本,測試其方法的可行性和可靠性。
點云的讀取根據原始數據類型的不同,設計了鏈接點云模型和點云文本數據兩種讀取方式,采用滑動條方式輸入重采樣的距離閾值,通過功能庫中的顯示坐標點節點(Point.ByCoordinates)顯示點云。具體節點鏈及程序結果如圖6所示。
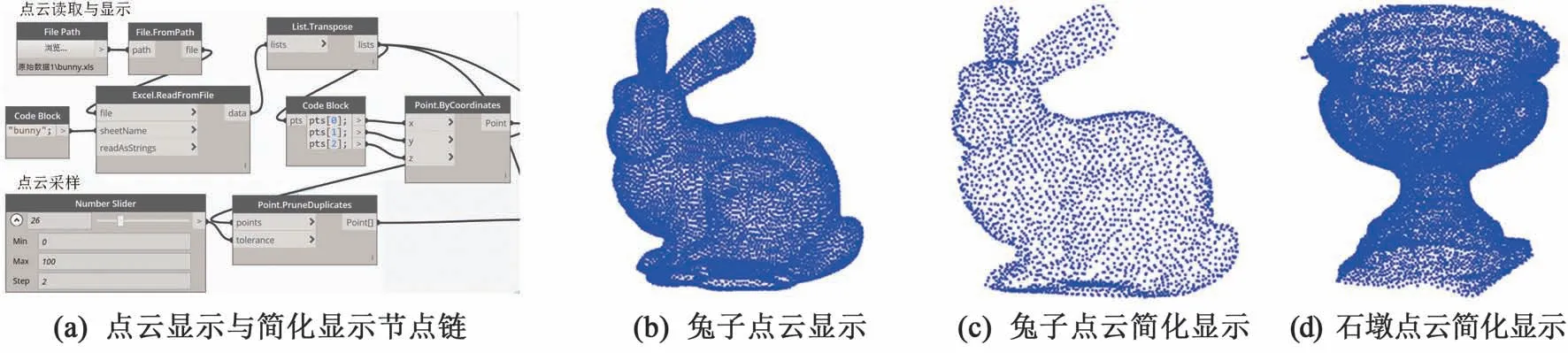
圖6 點云顯示及簡化圖
通過創建平面節點(PlanXY)創建一個xOy平面,并偏移至點云底部,選用轉化節點(Geometry.Translate)進行切平面布置,如圖7所示。
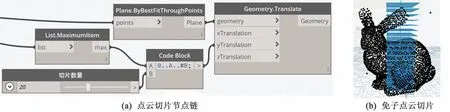
圖7 兔子點云切片圖
點云經過重采樣后呈現無序和稀疏的狀態,切平面上可能存在無點或少點附著的情況,因此對切平面上下閾值范圍內的點進行投影求交。選用Dynamo節點庫中的通過對角點建立方體節點(Cuboid.ByCorners)創建點云包圍盒,計算面密度作為閾值,如圖8(a)所示。創建閾值包圍盒,通過包圍盒判別節點(BoundingBox.Contain)判別盒內點集,如圖8(b)所示。再啟用叉積計算上盒與下盒點集的直線長,取每個點的連綴最短值為上下盒點對匹配關鍵碼,匹配后的點對按式(3)計算切平面投影點,得到切面點云,如圖8(c)所示。
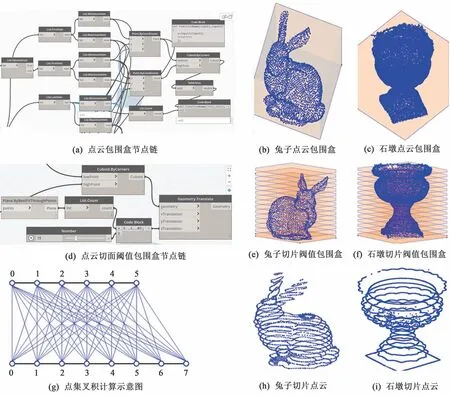
圖8 點云切片圖
切面點集有序化通過自定義節點實現,以循環語句判別點的歸屬表,選用Dynamo平臺中的通過控制點擬合曲線的節點(NurbsCurve.ByControlPoints)擬合切面點,得到閉合的截面曲線。通過輸入橫截面閉合曲線放樣創建實體,該功能由放樣創建實體節點(Solid.ByLoft)實現,如圖9(a)所示。
通過屬性設置及輸出節點(Springs.FamilyInstance.ByGeometry)為模型賦予材質,選擇族類別,設置名稱等屬性性質。此節點能自動調用Revit軟件中的材質庫和族庫,對于如古建中的屋脊,吻獸等構件可先在Revit中創建相應族類別名稱和路徑,在Dynamo中即可選擇該類別。對石墩進行屬性設置,在該節點的輸入端選擇石墩的實體類別為“常規模型”,材料為“花崗巖”,在Revit中得到如圖9(b)所示的實體模型。增加切面數量,將得到更精細的實體模型,石墩底部增加切面后細節表示更詳細,一般在形體復雜或突變的位置可增加切面數量,規則位置處可減少切面數量。模型同步導入Revit中,并保存為標準格式,不僅能通過Revit軟件中的編輯族命令進行二次編輯或改造,還能導入相應的應用軟件使用。

圖9 點云BIM實體模型圖
4 結論
利用點云構建BIM模型能有效利用實時采集信息,擴展建模途徑,提高建模效率。通過研究得到以下結論:
(1)以照片掃描方式獲取的點云為素材,在Dynamo平臺構建了點云顯示、簡化、切片、投影和建模的節點鏈,實現了點云到切面輪廓到模型的自動化建設,為表面形態復雜且無規則變化的構件提供了一種有效的自動化建模方法。
(2)在Dynamo平臺鏈接Revit屬性庫和定義切面數,能獲得不同屬性和精細度的建筑信息模型,為后續模型應用提供標準模型格式和信息數據。
(3)節點鏈設置為通用的樣板文件,可為不同點云數據實時調用,提高建模效率。為存量古建保護和既有建筑維護提供有效的實時信息數據。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19