新型DKT組合薄殼單元及對側(cè)翻一步碰撞算法的改進(jìn)*
2021-08-12 08:14:08陳軼嵩劉永濤
汽車工程 2021年7期
關(guān)鍵詞:變形結(jié)構(gòu)
王 童,陳軼嵩,劉永濤
(長安大學(xué)汽車學(xué)院,西安 710064)
前言
汽車保有量急劇上漲,人們出行生活越來越便利[1]。同時(shí),惡劣交通事故數(shù)量呈現(xiàn)逐步上升趨勢,給乘客生命財(cái)產(chǎn)帶來重大損失[2]。其中,客車側(cè)翻常造成群死群傷的嚴(yán)重后果,是最嚴(yán)重的交通事故類型之一[3]。如何最大限度預(yù)防側(cè)翻事故的發(fā)生,加強(qiáng)客車結(jié)構(gòu)側(cè)翻碰撞安全性研究,不斷提高客車側(cè)翻碰撞安全性能,已成為全社會共同關(guān)注并努力解決的重要問題之一[4]。
客車側(cè)翻一步碰撞算法,是參考板料沖壓一步成型算法思想,提出的一種用于客車側(cè)翻碰撞模擬分析的新算法[5]。借鑒該算法核心思想,側(cè)翻一步碰撞算法同樣基于塑性全量理論,利用側(cè)翻碰撞過程中能量的轉(zhuǎn)換關(guān)系。與現(xiàn)有LS?DYNA等增量法軟件相比,在略微犧牲一點(diǎn)計(jì)算精度情況下,大幅提升了計(jì)算效率。算法可在車身設(shè)計(jì)初期,對結(jié)構(gòu)側(cè)翻碰撞安全性進(jìn)行快速評價(jià),縮短產(chǎn)品開發(fā)周期,同時(shí),可為后續(xù)針對客車側(cè)翻安全性的靈敏度分析、參數(shù)優(yōu)化和拓?fù)鋬?yōu)化算法研究提供必要支撐條件[6]。
在有限元數(shù)值模擬過程中,不同單元模型選擇會對算法計(jì)算結(jié)果和效率產(chǎn)生較大影響[7]。因側(cè)翻一步碰撞算法基于塑性全量理論,車體骨架由若干大幾何尺寸薄壁桿件構(gòu)成,側(cè)翻碰撞過程主要受力特性為彎曲,故所有膜單元及比較簡單的三角形薄殼單元均無法滿足計(jì)算要求[8]。作者在客車側(cè)翻一步碰撞初始算法中采用了四節(jié)點(diǎn)Mindlin組合殼單元作為分析單元類型。為進(jìn)一步提高算法計(jì)算精度和效率,對四節(jié)點(diǎn)薄殼單元進(jìn)行翹曲修正改進(jìn),基于改進(jìn)后的四節(jié)點(diǎn)薄殼單元和塑性全量理論,將DKT(discreted kirchhoff theory)四節(jié)點(diǎn)薄板單元和傳統(tǒng)四節(jié)點(diǎn)等參膜單元組合,構(gòu)造一種新型四節(jié)點(diǎn)DKT組合薄殼單元,替代初始算法四節(jié)點(diǎn)Mindlin組合殼單元,對側(cè)翻一步碰撞算法改進(jìn)。預(yù)計(jì)改進(jìn)后算法在模擬效率基本不變的同時(shí),計(jì)算精度得到一定程度的提高。
1 側(cè)翻一步碰撞算法基本理論
客車側(cè)翻一步碰撞算法[9],基于非線性全量理論和比例加載假定,依據(jù)ECER66法規(guī)[10],忽略中間狀態(tài)和構(gòu)形變化[11],只考慮結(jié)構(gòu)碰撞開始和最大變形兩個狀態(tài)。根據(jù)車體側(cè)翻碰撞過程運(yùn)動變形特點(diǎn)和能量轉(zhuǎn)換關(guān)系,得到滿足變形條件的初始解,采用Newton?Raphson法迭代求解[12-13],快速獲得結(jié)構(gòu)最終變形。
將碰撞開始狀態(tài)結(jié)構(gòu)作為初始構(gòu)形{X0}。此時(shí)車體未發(fā)生變形,結(jié)構(gòu)動能Ed為

式中:M為車體質(zhì)量;Δh為車體質(zhì)心下降高度;J為車體繞假定轉(zhuǎn)軸轉(zhuǎn)動慣量;ω為車體角速度。
碰撞開始狀態(tài)結(jié)構(gòu)各節(jié)點(diǎn)速度{v0}為

式中:ri為各節(jié)點(diǎn)到側(cè)翻假定轉(zhuǎn)軸的距離;n為節(jié)點(diǎn)數(shù)。
在結(jié)構(gòu)最大變形狀態(tài),車體結(jié)構(gòu)產(chǎn)生明顯變形。側(cè)翻一步碰撞算法中,結(jié)構(gòu)最大變形不確定,需假定一個最大變形構(gòu)形{x0}。各節(jié)點(diǎn)位移{U0}為

車體結(jié)構(gòu)動能Ed在碰撞中主要轉(zhuǎn)換為結(jié)構(gòu)形變能,結(jié)構(gòu)形變能W為[14]

式中:{ε}為單元塑性應(yīng)變;{σ}為單元塑性應(yīng)力;Ve為單元體積;N為單元數(shù)。
判斷結(jié)構(gòu)形變能W與車體動能Ed是否滿足式(5)能量關(guān)系假定:

若不滿足,則對節(jié)點(diǎn)位移{U0}進(jìn)行修正,按照式(4)重新計(jì)算結(jié)構(gòu)形變能。將滿足式(5)能量關(guān)系假定的節(jié)點(diǎn)位移{U}作為Newton?Raphson迭代初始解。
對滿足能量轉(zhuǎn)換關(guān)系初始解{U},節(jié)點(diǎn)失衡力{R(U)}已處于不平衡狀態(tài):

式中:{Fext(Ui)}為廣義失衡外力;{Fint(Ui)}為廣義失衡內(nèi)力。
應(yīng)用Newton?Raphson法,解決節(jié)點(diǎn)失衡力不平衡問題。對初始解{U}按式(7)和式(8)迭代求解,使式(6)達(dá)到平衡,得到結(jié)構(gòu)最終變形。

2 四節(jié)點(diǎn)薄殼單元翹曲修正改進(jìn)
客車側(cè)翻碰撞結(jié)構(gòu)變形過程中,部分結(jié)構(gòu)可能存在變形過大問題,導(dǎo)致較明顯單元翹曲[15],影響算法計(jì)算精度。對所有四節(jié)點(diǎn)薄殼單元,首先考慮單元翹曲修正問題,對其進(jìn)行改進(jìn),接著建立本文所需四節(jié)點(diǎn)DKT組合薄殼單元模型,對側(cè)翻一步碰撞初始算法進(jìn)行改進(jìn)。
2.1 考慮翹曲修正的四節(jié)點(diǎn)薄殼單元坐標(biāo)轉(zhuǎn)換關(guān)系
提取四節(jié)點(diǎn)薄殼單元中性層。在整體坐標(biāo)系下,產(chǎn)生翹曲的四節(jié)點(diǎn)單元中性層為i'j'k'l',各節(jié)點(diǎn)坐 標(biāo) 為i'(Xi',Yi',Zi')、j'(Xj',Yj',Zj')、k'(Xk',Yk',Zk')、l'(Xl',Yl',Zl')。將翹曲后單元中性層,以對角線i'k'作為軸線,分割為兩個三角形Δi'l'k'和Δi'j'k',展開到過k'點(diǎn)、以n→為法向量的平面內(nèi),可以得到不產(chǎn)生翹曲的四節(jié)點(diǎn)單元i'j″k'l″,如圖1所示。

圖1 四節(jié)點(diǎn)薄殼單元中性層翹曲展開前后示意圖
整體坐標(biāo)系內(nèi),翹曲單元4個節(jié)點(diǎn)坐標(biāo)均已知。對于三角形 Δi'j″k',邊長Li'j'=Li'j″、Lk'j'=Lk'j″、Lk'l'=Lk'l″、Li'l'=Li'l″及軸線Li'k'長度均可計(jì)算。
2.2 基于形心位置不變假設(shè)的最終展開構(gòu)形
翹曲四節(jié)點(diǎn)薄殼單元在展開前后形心位置保持不變。在整體坐標(biāo)系內(nèi),將展開后的四節(jié)點(diǎn)單元形心平移至展開前初始位置。由于單元翹曲時(shí)形心位置,在單元展開后已發(fā)生變化,需將其平移至展開前位置。以展開后四節(jié)點(diǎn)單元i'j″k'l″形心為基點(diǎn),因展開后四節(jié)點(diǎn)單元形心需積分,計(jì)算不便,故將單元各節(jié)點(diǎn)坐標(biāo)平均值近似作為形心O″,如圖2所示。
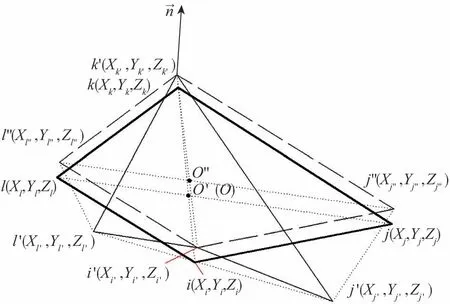
圖2 整體坐標(biāo)系下展開后單元形心平移示意圖
因翹曲單元i'j'k'l'形心無法準(zhǔn)確確定,故本文以翹曲單元各節(jié)點(diǎn)坐標(biāo)平均值為近似形心O',將展開后四節(jié)點(diǎn)單元形心O″平移到翹曲展開前點(diǎn)O',得到最終翹曲修正單元構(gòu)形。翹曲展開后單元形心O″坐標(biāo)為
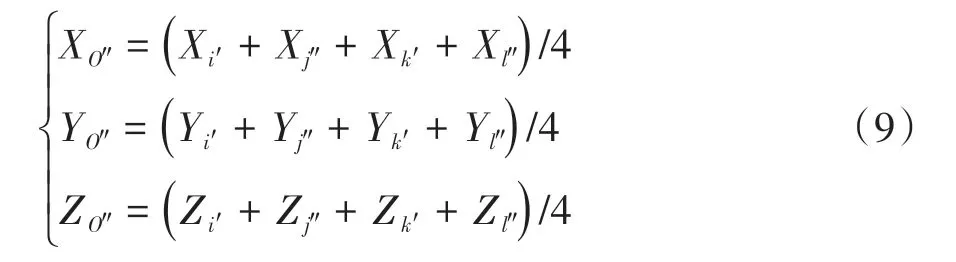
翹曲單元展開前形心O'坐標(biāo)為
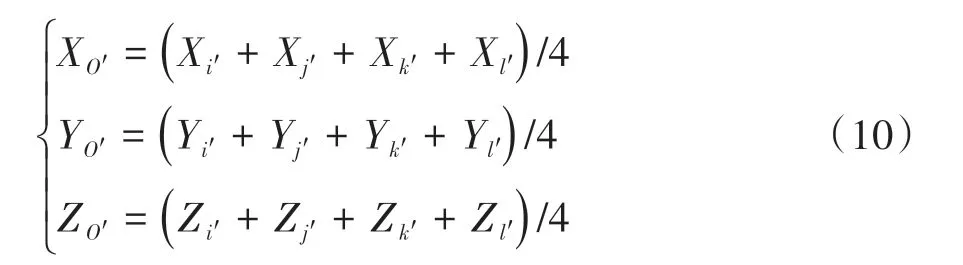
可得平移形心后四節(jié)點(diǎn)單元ijkl各節(jié)點(diǎn)坐標(biāo)為
式中ξ分別取i、j、k、l,?分別取i'、j″、k'、l″。
經(jīng)過上述計(jì)算過程,可對已發(fā)生翹曲四節(jié)點(diǎn)薄殼單元進(jìn)行修正,在整體坐標(biāo)系內(nèi)獲得翹曲修正改進(jìn)后單元(中性層)各節(jié)點(diǎn)坐標(biāo)。
3 改進(jìn)的四節(jié)點(diǎn)DKT組合薄殼單元構(gòu)造及對側(cè)翻一步碰撞初始算法的改進(jìn)
對經(jīng)過翹曲修正的四節(jié)點(diǎn)薄殼單元,為便于計(jì)算單元應(yīng)力應(yīng)變和節(jié)點(diǎn)內(nèi)力,須重新將整體坐標(biāo)系下翹曲修正改進(jìn)后的單元各節(jié)點(diǎn)坐標(biāo)轉(zhuǎn)換至局部坐標(biāo)下,進(jìn)行算法后續(xù)計(jì)算過程[16]。
3.1 四節(jié)點(diǎn)DKT薄板單元
離散Kirchhoff理論基于以下基本假定:(1)單元中面的垂直法線,變形前后仍與中面垂直,且長度不變;(2)單元厚向應(yīng)變εz=0,厚向應(yīng)力σz=0,切向應(yīng)力γxz=0、γyz=0。
在上述基本假定基礎(chǔ)上,建立基于離散Kirchhoff理論的四節(jié)點(diǎn)薄板單元。單元局部坐標(biāo)系內(nèi),模型約定僅單元4個角節(jié)點(diǎn)和4條邊的4個邊中節(jié)點(diǎn)保持Kirchhoff直法線假設(shè),且每個角節(jié)點(diǎn)有自由 度(wξ,θξx,θξy)(ξ=i,j,k,l),邊 中 節(jié) 點(diǎn) 有 自 由 度(θ?x,θ?y)(?=i',j',k',l'),如圖3所示。
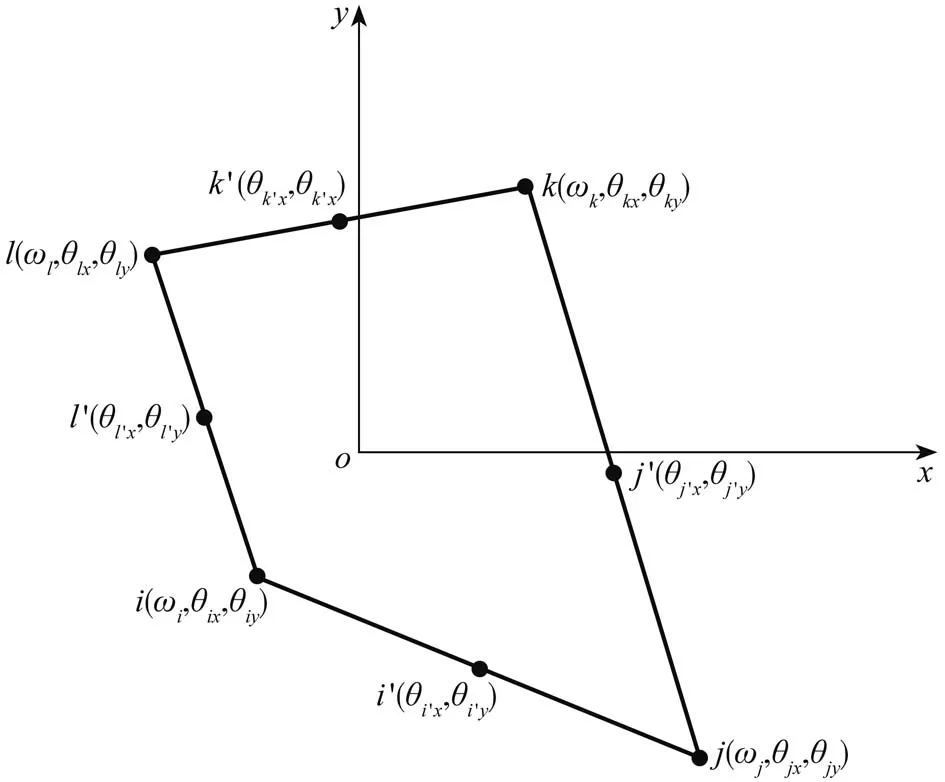
圖3 離散Kirchhoff理論節(jié)點(diǎn)自由度假設(shè)
四節(jié)點(diǎn)DKT薄板單元中性層內(nèi)任意一點(diǎn)轉(zhuǎn)動自由度θx和θy可由單元4個角節(jié)點(diǎn)進(jìn)行插值,即

式中 :{}為單 元各節(jié) 點(diǎn)自由 度{wi,θix,θiy,wj,θjx,θjy,wk,θkx,θky,wl,θlx,θly}T,且有[Hx]=[Hx1Hx2...Hx12],[Hy]=[Hy1Hy2...Hy12]。
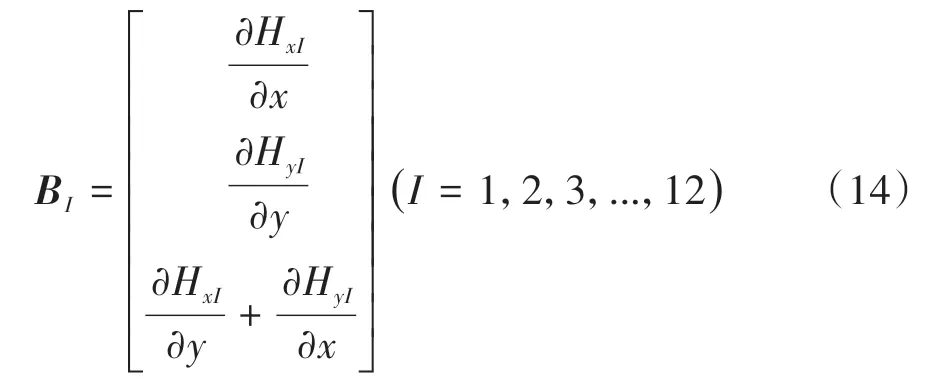
四節(jié)點(diǎn)DKT薄板單元Bb矩陣為

其中
3.2 四節(jié)點(diǎn)等參膜單元
對側(cè)翻碰撞過程中單元拉伸效應(yīng),本文中選擇雙線性四節(jié)點(diǎn)等參膜單元模擬,各節(jié)點(diǎn)自由度向量如圖4所示。
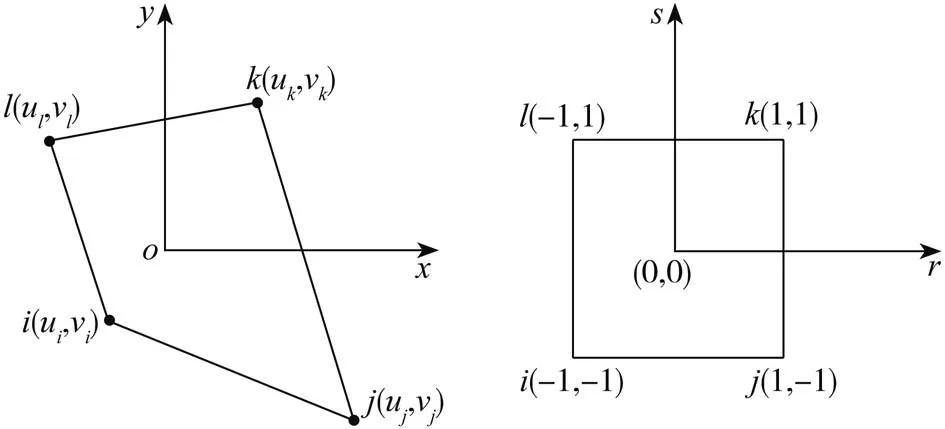
圖4 四節(jié)點(diǎn)等參膜單元示意圖
經(jīng)等參變換后單元形函數(shù)為

式中ri和si(i=1,2,3,4)為經(jīng)過等參變換后各節(jié)點(diǎn)的自然坐標(biāo),其值為±1。
四節(jié)點(diǎn)等參膜單元B m矩陣為
3.3 基于塑性全量理論的節(jié)點(diǎn)廣義內(nèi)力計(jì)算
將上述3.1節(jié)部分所獲四節(jié)點(diǎn)DKT薄板單元和3.2節(jié)部分所獲四節(jié)點(diǎn)等參膜單元B矩陣進(jìn)行組合,得到所需四節(jié)點(diǎn)DKT組合薄殼單元。將其應(yīng)用于基于塑性全量理論的側(cè)翻一步碰撞算法,計(jì)算客車側(cè)翻碰撞過程產(chǎn)生的單元變形及各節(jié)點(diǎn)廣義內(nèi)力。
3.3.1 塑性應(yīng)力計(jì)算
左Cauchy?Green變形矩陣逆陣[G]-1為

其中

對空間四節(jié)點(diǎn)DKT組合薄殼單元內(nèi)部任意一點(diǎn)i,由于受到彎曲變形影響,該點(diǎn)所在橫向上任意一點(diǎn)位移不同。令薄殼厚度為t,為計(jì)算單元應(yīng)變、應(yīng)力及節(jié)點(diǎn)廣義內(nèi)力,經(jīng)對多組方案對比分析,本文在單元厚向選擇5點(diǎn)高斯積分[17],各積分層均采用全積分方式,對板彎曲和膜拉伸兩種變形同時(shí)進(jìn)行考慮,如圖5所示。

圖5 薄殼單元的向量關(guān)系示意圖
四節(jié)點(diǎn)等參膜單元內(nèi)部任意一點(diǎn)位移,可由位移插值函數(shù)計(jì)算:

四節(jié)點(diǎn)DKT薄板單元內(nèi)部任意點(diǎn)轉(zhuǎn)動自由度θx和θy可由單元4個角節(jié)點(diǎn)進(jìn)行插值,由式(12)計(jì)算。在圖5中,L1、L2、L3、L4、L5為5點(diǎn)高斯積分求積位置因 子 ,數(shù) 值 分 別 為0.906 179 85、0.538 469 31、0、-0.906 179 85、-0.538 469 31。
各積分層單元局部坐標(biāo)系下各個方向?qū)?shù)應(yīng)變?yōu)椋?8]
單元各積分層面內(nèi)或彎曲變形產(chǎn)生的塑性應(yīng)力σs1、σs2、σs3、σs4、σs5可由式(21)計(jì)算[19],其中σs3為膜應(yīng)力,σs1、σs2、σs4、σs5為板應(yīng)力。
3.3.2 節(jié)點(diǎn)廣義內(nèi)力計(jì)算
由3.3.1節(jié)部分所獲各積分層塑性應(yīng)力,各積分層廣義內(nèi)力為
單元各節(jié)點(diǎn)廣義內(nèi)力可對各積分層廣義內(nèi)力組合得到,即
應(yīng)用坐標(biāo)轉(zhuǎn)換矩陣[T]-1可將局部坐標(biāo)系下單元各節(jié)點(diǎn)內(nèi)力及內(nèi)力矩轉(zhuǎn)換至空間坐標(biāo)系下,即

其中

車體結(jié)構(gòu)各節(jié)點(diǎn)廣義內(nèi)力向量{F}int可由空間內(nèi)各單元節(jié)點(diǎn)廣義內(nèi)力累加,即

接著可對初始解各節(jié)點(diǎn)廣義失衡力進(jìn)行Newton?Raphson迭代,得到算法所需結(jié)構(gòu)最終變形。
4 應(yīng)用實(shí)例
為檢驗(yàn)本文所提新型DKT組合薄殼單元對客車側(cè)翻一步碰撞初始算法改進(jìn)的有效性,以某企業(yè)實(shí)際開發(fā)的一款12 m公路客車典型車身段作為分析對象,通過對車身段模型適當(dāng)簡化,將側(cè)翻一步碰撞改進(jìn)算法與初始算法、LS?DYNA和實(shí)車試驗(yàn)結(jié)果進(jìn)行對比,檢驗(yàn)所提單元模型實(shí)際效果。
車身段試驗(yàn)?zāi)P腿鐖D6所示,試驗(yàn)?zāi)P突緟?shù)如下:總質(zhì)量2 409 kg,質(zhì)心離地高度1.5 m,X方向距離前端面為0.937 m,Y方向?yàn)?.012 m,如表1所示。
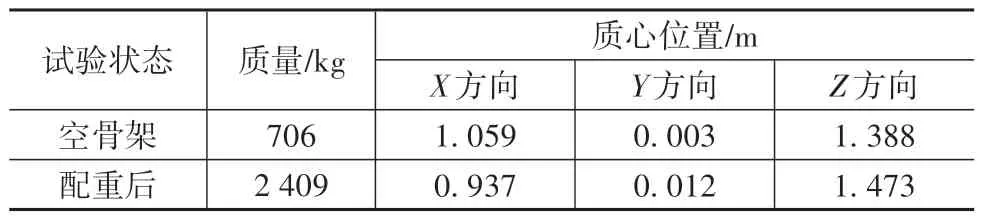
表1 典型車身段基本參數(shù)

圖6 典型車身段模型示意圖
車身段側(cè)翻臨界角為39o。參照典型車身段試驗(yàn)?zāi)P停喕蟮湫蛙嚿矶谓Y(jié)構(gòu)有限元模型如圖7所示。共離散四節(jié)點(diǎn)單元259 976個,節(jié)點(diǎn)258 368個。黃色部分結(jié)構(gòu)為車身骨架結(jié)構(gòu),綠色部分結(jié)構(gòu)為側(cè)翻翻轉(zhuǎn)支架結(jié)構(gòu),紅色部分為乘員生存空間。與側(cè)翻試驗(yàn)?zāi)P拖嗤?jì)算模型骨架及側(cè)翻翻轉(zhuǎn)支架結(jié)構(gòu)材料均選用Q345鋼,材料彈性模量E=2.06×1011Pa,泊松比μ=0.3,密度ρ=7800 kg/m3,屈服強(qiáng)度σs=345MPa;乘員生存空間為剛性材料,密度取值盡量小,ρ=10 kg/m3,以免影響模擬結(jié)果精度[20]。
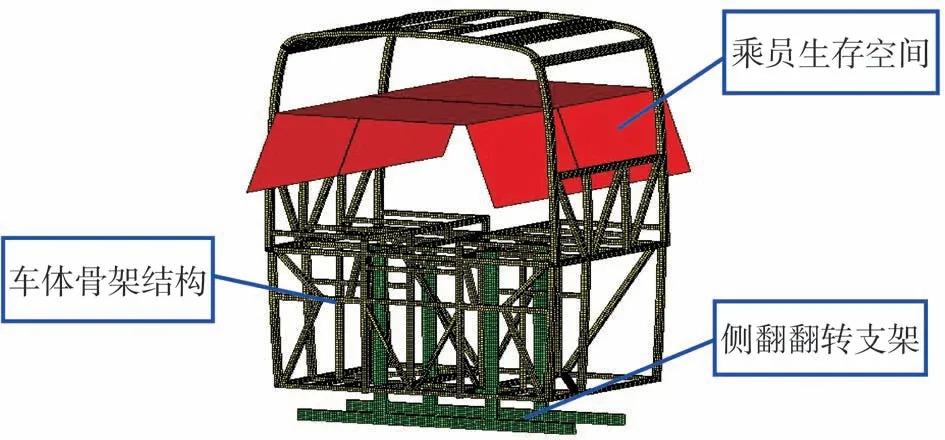
圖7 典型車身段有限元模型
圖8所示為應(yīng)用所提新型DKT組合薄殼單元改進(jìn)的側(cè)翻一步碰撞算法(以下簡稱“改進(jìn)算法”)模擬的結(jié)構(gòu)最終變形云圖。圖9所示為初始算法模擬的結(jié)構(gòu)最終變形云圖。圖10所示為LS?DYNA仿真的結(jié)構(gòu)最終變形云圖。圖11所示為側(cè)翻試驗(yàn)結(jié)構(gòu)變形結(jié)果圖。
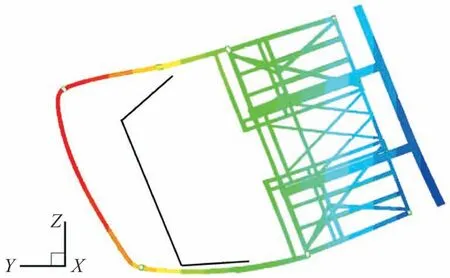
圖8 改進(jìn)算法模擬結(jié)構(gòu)最終變形云圖

圖9 初始算法模擬結(jié)構(gòu)最終變形云圖
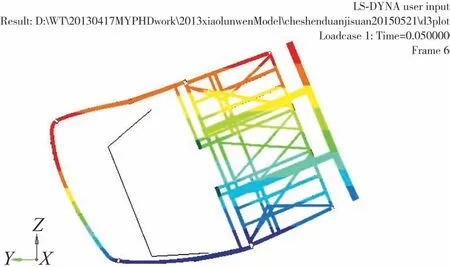
圖10 LS?DYNA仿真結(jié)構(gòu)最終變形云圖

圖11 典型車身段側(cè)翻試驗(yàn)結(jié)構(gòu)最終變形
將圖8~圖11進(jìn)行對比可以看出,4種模擬方式所得結(jié)構(gòu)最終變形形態(tài)趨勢基本吻合,應(yīng)用所提新型DKT組合薄殼單元對側(cè)翻一步碰撞算法進(jìn)行改進(jìn),在實(shí)際工程應(yīng)用中具有一定合理性。
為使上述對比結(jié)論更具說服力,需對4種方式結(jié)構(gòu)最終變形定量對比。車身段側(cè)翻碰撞過程中,底架結(jié)構(gòu)幾乎不產(chǎn)生變形,且與乘員生存空間的侵入量無直接關(guān)聯(lián)。在企業(yè)對該車身段模型側(cè)翻試驗(yàn)中,為獲得結(jié)構(gòu)變形數(shù)據(jù),在典型車身段封閉環(huán)①和②兩側(cè)立柱內(nèi)表面各選取11個測點(diǎn)進(jìn)行數(shù)據(jù)采集。上述4種方式各立柱變形量如表2所示。

表2 各封閉環(huán)兩側(cè)立柱變形量統(tǒng)計(jì) mm
圖12和圖13所示為典型車身段封閉環(huán)①和②兩側(cè)立柱變形量對比柱狀圖。
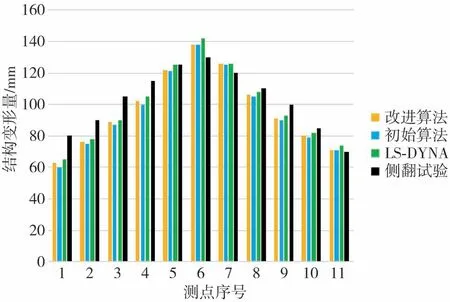
圖12 封閉環(huán)①兩側(cè)立柱變形量對比
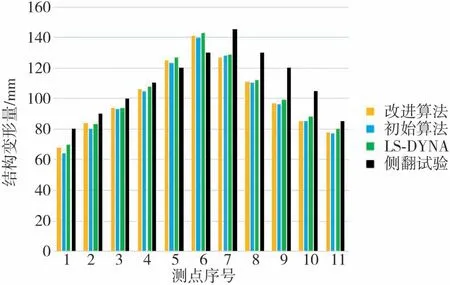
圖13 封閉環(huán)②兩側(cè)立柱變形量對比
從圖12和圖13可看出,受試驗(yàn)制備及實(shí)際測量過程誤差的影響,側(cè)翻試驗(yàn)數(shù)據(jù)在穩(wěn)定性方面波動相對較明顯,但對改進(jìn)算法實(shí)際應(yīng)用有效性檢驗(yàn),具有一定工程參考價(jià)值。通過對比分析發(fā)現(xiàn),4種方式所獲結(jié)構(gòu)各測點(diǎn)數(shù)據(jù)走勢基本一致,驗(yàn)證了結(jié)構(gòu)最終變形趨勢吻合的結(jié)論。改進(jìn)算法與LS?DYNA平均誤差約為1.9%,精度略有犧牲,但比初始算法提高約1.5%;與側(cè)翻試驗(yàn)平均誤差約為7.1%,小于有限元工程計(jì)算誤差經(jīng)驗(yàn)值范圍(即15%),計(jì)算精度在實(shí)際工程接受范圍內(nèi)。
接著對算法模擬效率進(jìn)行對比。將側(cè)翻一步碰撞改進(jìn)算法模擬效率與初始算法及LS?DYNA進(jìn)行對比,對比結(jié)果如表3所示。

表3 模擬效率對比
從表3可看出,改進(jìn)算法模擬時(shí)間比初始算法稍快4 min,改進(jìn)算法模擬時(shí)間約為LS?DYNA的1/10,初始算法約為LS?DYNA的1/9,改進(jìn)算法模擬效率有一定提升。結(jié)合立柱變形量對比結(jié)論,改進(jìn)算法在模擬效率些許提升的同時(shí),計(jì)算精度也有一定程度的提高,可在客車結(jié)構(gòu)設(shè)計(jì)初期,更快更準(zhǔn)確獲得側(cè)翻碰撞結(jié)構(gòu)最終變形,對結(jié)構(gòu)側(cè)翻碰撞安全性進(jìn)行快速評價(jià),縮短產(chǎn)品開發(fā)周期。同時(shí),可為后續(xù)針對客車側(cè)翻安全性的靈敏度分析、參數(shù)優(yōu)化及拓?fù)鋬?yōu)化算法研究提供必要支撐條件,檢驗(yàn)了本文所提新型單元實(shí)際效果和工程應(yīng)用價(jià)值。
5 結(jié)論
針對客車側(cè)翻碰撞結(jié)構(gòu)變形模擬過程中,因部分結(jié)構(gòu)變形過大導(dǎo)致的單元翹曲問題,先對四節(jié)點(diǎn)薄殼單元進(jìn)行了翹曲修正。接著,在翹曲修正后薄殼單元中性層基礎(chǔ)上,基于塑性全量理論,將四節(jié)點(diǎn)DKT薄板單元和四節(jié)點(diǎn)等參膜單元進(jìn)行組合,獲得新型四節(jié)點(diǎn)DKT組合薄殼單元,替代側(cè)翻一步碰撞初始算法中四節(jié)點(diǎn)Mindlin組合殼單元,對側(cè)翻一步碰撞算法進(jìn)行改進(jìn)。以某12 m公路客車典型車身段作為研究對象,將改進(jìn)算法模擬結(jié)果與初始算法、LS?DYNA及側(cè)翻試驗(yàn)結(jié)果進(jìn)行對比,檢驗(yàn)了本文所提新型單元的實(shí)際中的有效性。
所提新型DKT組合薄殼單元,在厚向及各積分層積分方式和積分點(diǎn)數(shù)量對側(cè)翻一步碰撞算法模擬精度及效率的影響尚未考慮,可能會對模擬結(jié)果有較大影響,在后續(xù)對此做進(jìn)一步深入探討研究,使側(cè)翻一步碰撞算法性能得到進(jìn)一步提升。
猜你喜歡
哲學(xué)評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2020年1期)2020-09-21 09:24:52
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
小學(xué)生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
數(shù)學(xué)小靈通·3-4年級(2017年10期)2017-11-08 08:42:59
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2017年11期)2017-04-23 07:18:00
數(shù)學(xué)大王·中高年級(2016年12期)2016-12-26 21:37:36
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
現(xiàn)代企業(yè)(2015年9期)2015-02-28 18:56:50