基于CPU+FPGA的羅蘭C導航系統模擬器
2021-08-17 06:02:56李嘉穎
宇航計測技術 2021年1期
崔 科 李嘉穎 路 輝
(1.中國人民解放軍91395部隊,北京 102443;2.中國人民解放軍軍事科學院系統工程研究院,北京 100141;3.北京航空航天大學電子信息工程學院,北京 100191)
1 引 言
羅蘭C導航系統是美國在20世紀50年代末期為滿足軍事需要而研制的陸基遠程無線電導航系統,是衛星導航系統出現前全球最主要的遠程高精度導航系統。該系統具有抗干擾能力強、重復定位精度高、可靠性高、建造維護成本低等優點,在航海、航空導航定位及長波授時等方面有著廣泛的應用。同時,羅蘭C導航系統還具有數據通信能力,具有很大的應用潛力。
羅蘭C導航系統接收機或監測設備的研制、維修、測試等工作需要穩定可靠、參數可調的羅蘭C信號源產生信號,以檢測接收機或監測設備的捕獲和跟蹤性能。羅蘭C系統的技術開發和功能拓展也需要可定制化的信號源。固定場所的羅蘭C信號環境基本穩定不變,無法滿足實際工作需要。工程中,通常采用信號模擬器來解決信號源問題。現有羅蘭C導航信號模擬器的信號質量和系統功能存在一些不足,如信號包周差不穩定、不能準確模擬運動目標的定位信號等。針對這些問題,本文設計了一種基于通用計算機平臺,采用軟硬件融合的上位機、下位機架構的羅蘭C信號模擬器,實現了多類型、高質量的信號模擬。
2 羅蘭C系統信號簡介
羅蘭C系統各地面臺發射的信號都遵守規定的格式,即各臺發射的脈沖組中單個脈沖的標準特性、脈沖個數、脈沖時間間隔、脈沖載頻的相位編碼、脈沖組重復周期及臺鏈中各副臺發射信號的編碼延時等都有固定格式。
2.1 單脈沖信號
羅蘭C系統單個脈沖信號是由一個鐘形脈沖對100kHz的正弦信號進行調制形成,脈沖寬度為200μs左右,脈沖峰值點大約在65μs。單個脈沖信號的波形如圖1所示。
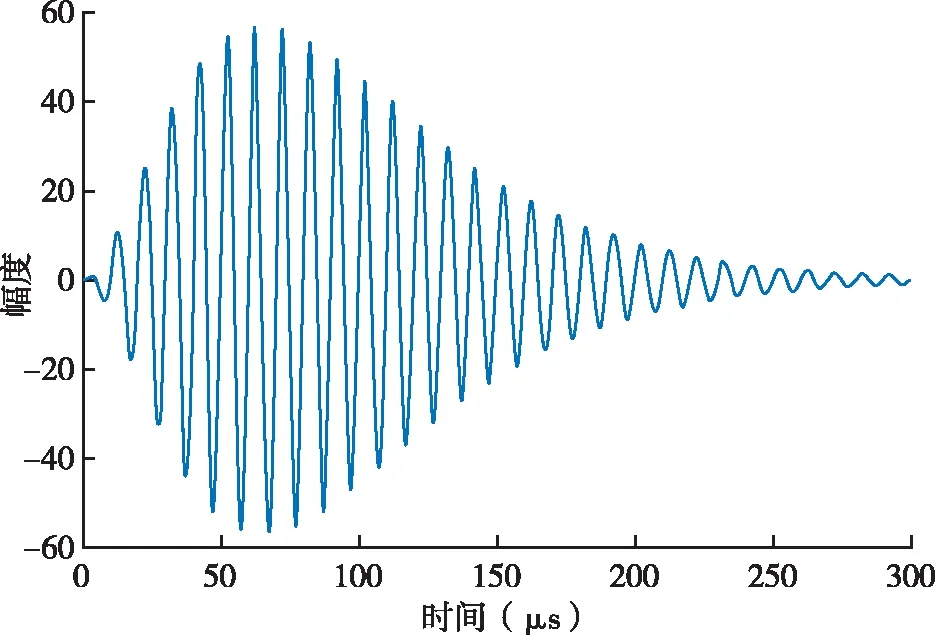
圖1 羅蘭C單脈沖信號波形圖Fig.1 Loran-C monopulse signal waveform
羅蘭C系統信號脈沖波形以發射天線底部的電流波形定義,天線底部電流脈沖波形的時域數學表達式為
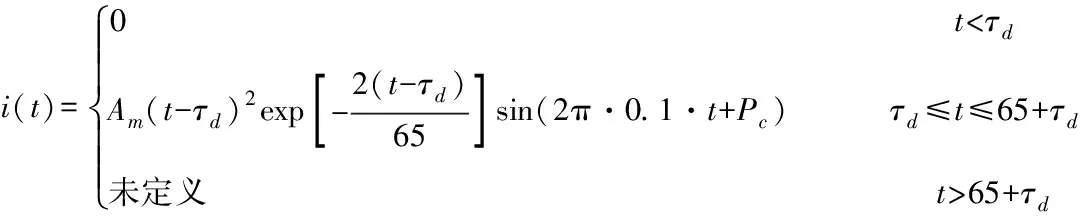
(1)
式中:A
——電流峰值幅度的歸一化值,單位A;t
——工作時間,單位μs;τ
——信號的包周差,單位μs;P
——脈沖相位編碼參數,單位弧度,正相位編碼時取值為0,負相位編碼時取值為π。2.2 脈沖組信號
羅蘭C系統以脈沖組的形式發射信號,主臺每個脈沖組有9個脈沖,前8個脈沖相互間隔1 000μs,第9個脈沖與第8個間隔為2 000μs;副臺每個脈沖組有8個脈沖,各脈沖間隔均為1 000μs。脈沖組與脈沖組的時間間隔稱為脈沖組重復周期(Group Repetition Interval,GRI),羅蘭C系統通過不同GRI來標識臺鏈,同一臺鏈內所有發射臺的GRI相同。羅蘭C系統允許的GRI范圍是(40 000~99 990)μs,以10μs的整數倍做臺鏈間隔,最多可建6 000個臺鏈。通常GRI用其數值相對10μs的整數倍來表示。1個主臺和若干個副臺(至少2個)共同組成1個臺鏈。臺鏈內各發射臺按規定順序發射信號,順序如圖2所示:主臺信號最先發射,經時差1延遲后,第一副臺X開始發射信號,經時差2延遲后,第二副臺Y開始發射信號,其他副臺發射信號順序以此類推。羅蘭C系統利用接收設備測得的主、副臺信號到達時間差(等效為距離差)根據雙曲線定位原理實現定位。
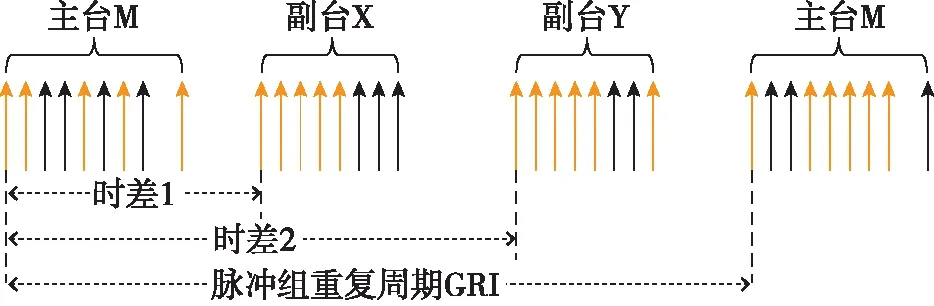
圖2 脈沖組重復周期及臺鏈工作時差圖Fig.2 Schematic diagram of pulse group repetition period and time difference of station chain operation
脈沖組內各脈沖用載頻相位編碼進行排序,兩個GRI形成一個相位編碼重復周期(Pulse Code Interval,PCI),這兩個GRI分別稱為AGRI和BGRI。羅蘭C信號相位編碼見表1。
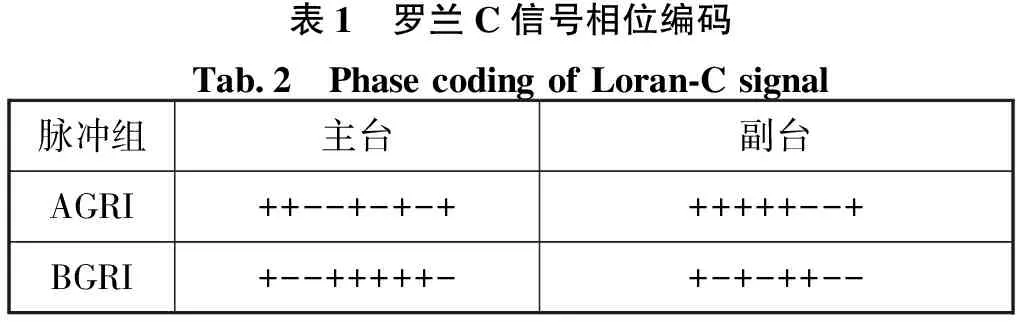
表1 羅蘭C信號相位編碼Tab.2 Phase coding of Loran-C signal脈沖組主臺副臺AGRI++--+-+-++++++--+BGRI+--+++++-+-+-++--
3 模擬器系統設計與實現
3.1 設計要求
作為檢測和測試用的信號源,羅蘭C系統信號模擬器需滿足如下要求。
1)能模擬產生波形連續、幅度可調的羅蘭C系統任意臺鏈導航信號;
2)能產生相互獨立、可任意組合的天波、單頻及噪聲干擾信號;
3)臺鏈GRI和臺鏈內主、副臺時差在規定范圍內可調,天波延時量可調;
4)模擬真實臺鏈內運動目標定位信號時,能提供實時參考坐標。
根據設計需求,設定模擬器參數指標如下。
1)系統輸出信號中心頻率100kHz,幅度可調;
2)設計時差工作模式。該模式下,模擬器能模擬產生1個主臺、2個副臺組成的臺鏈信號,臺鏈GRI值可在4 000~9 999之間任意設定,主、副臺信號時差可在(11~70)ms范圍內調節;
3)設計定位工作模式。該模式下,模擬器能模擬我國“長河二號”系統各臺鏈覆蓋范圍內簡單運動目標的定位信號,并給出實時參考坐標;
4)定位工作模式下,設計目標的運動速度在(0~340)m/s范圍內,速度分辨率為1m/s;
5)定位工作模式下,模擬器信號能模擬各地面臺信號功率因傳輸距離形成的差異;
6)天波干擾信號幅度、延時量可調,最小延時38μs,且天、地波信號可分離。
3.2 功能設計及實現
根據設計需求和參數指標,設計的羅蘭C導航系統模擬器系統工作原理如圖3所示。

圖3 系統工作原理圖Fig.3 Schematic diagram of the simulator system
3.2.1
各模塊的功能1)參數設置模塊是模擬器的用戶交互界面,負責模擬器工作模式選擇、參數設置及輸出顯示;
2)臺鏈時差模塊負責根據設置的GRI和主副臺信號時差計算產生下位機信號控制參數;
3)導航定位模塊負責根據設置的目標初始狀態、運動模式及所選臺鏈計算下位機的信號控制參數,并在用戶交互界面上顯示目標的實時坐標;
4)信號環境模塊負責根據設置的天波、單頻干擾和噪聲信號參數計算產生下位機信號的控制參數;
5)數據傳輸模塊負責將上位機計算的各信號控制參數進行數據傳輸,同時接收下位機中斷信號;
6)數據解算模塊負責將上位機下發的數據按照通信協議進行解析,并傳輸給下位機各功能模塊;
7)時鐘和同步復位管理模塊負責下位機FPGA和D/A板卡的時鐘同步、定時響應及信號復位;
8)發射臺信號處理模塊負責根據上位機下發的GRI、主副臺時差等參數,在系統時鐘控制下,依次周期產生主臺、副臺1、副臺2的脈沖組信號,并進行相位編碼;
9)環境信號處理模塊負責根據控制參數產生相應的天波、單頻或噪聲干擾信號;
10)定位數據反饋模塊負責定時向上位機反饋中斷信號,實現控制參數更新;
11)信號合成輸出模塊負責將下位機各模塊產生的數據進行合路,并完成D/A轉換和信號輸出。
3.2.2
實現方法1)上位機信號控制參數的計算
時差模式下,臺鏈、主副臺時差及環境參數由用戶自主設置,按照下位機系統時鐘進行相應參數轉換。
導航模式下,信號控制參數計算主要涉及目標與臺鏈內各發射臺距離的計算、坐標更新計算和目標運動狀態下信號控制參數的計算,即需要解決地球表面任意兩點的最短距離問題、運動目標坐標更新問題和信號頻率生成問題。
本設計采用了導航領域廣泛應用的Andoyer-Lambert公式解決地球表面任意兩點的最短距離問題。Andoyer-Lambert公式計算速度快,精度高,能夠滿足羅蘭C系統導航定位的要求。
本設計通過建立站心坐標系,在下位機中斷信號周期控制下,根據目標運動速度、運動方向、目標位置對應的子午線弧曲率半徑、平行圈半徑等參數進行目標坐標位置的更新計算。
本設計采用直接數字頻率合成(Direct Digital Frequency Synthesis,DDS)技術解決信號頻率生成問題。DDS技術工作原理如圖4所示。在參考時鐘控制下,通過相位累加器累加頻率控制字K
得到信號相位值,然后利用信號波形查找表得到信號波形幅度的數字量信號,通過D/A轉換、濾波后產生要求的波形信號。DDS技術的輸出信號公式為f
=K
×f
/
2(2)
式中:f
——輸出信號頻率;K
——頻率控制字;2——查找表中信號波形相位值的個數(與速度分辨率指標有關);f
——參考時鐘頻率。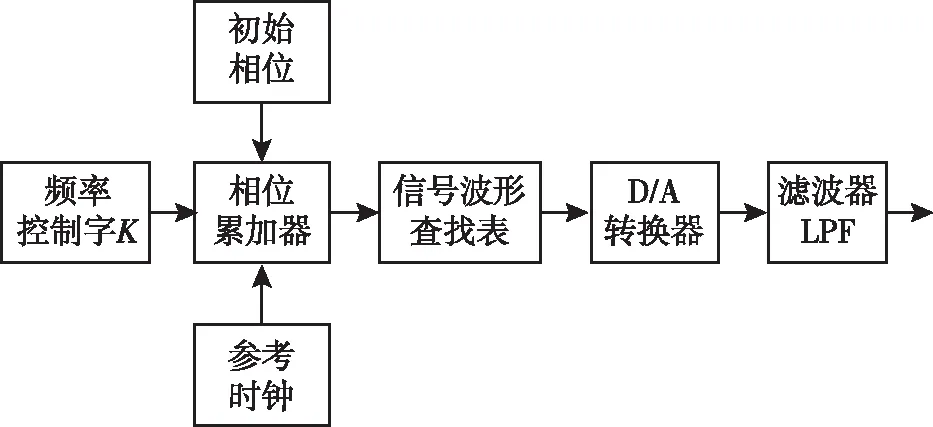
圖4 DDS技術工作原理框圖Fig.4 Working principle diagram of DDS Technology
在輸出信號頻率和目標運動速度已知的情況下,根據多普勒頻移公式和DDS輸出信號公式,上位機計算得到目標運動時接收信號對應的頻率控制字,進而由下位機產生相應信號;
2)產生羅蘭C系統信號波形。根據羅蘭C單個脈沖波形數學表達式,利用Matlab工具軟件,分別生成1/4正弦波和單脈沖包絡的采樣數據,存入FPGA內部的ROM中,通過FPGA編程產生各發射臺的羅蘭C導航信號;
3)產生環境信號波形,利用Matlab工具軟件產生數字白噪聲采樣數據,存入FPGA內部的ROM中,可產生噪聲信號;天波干擾信號由各地面臺信號延時產生;單頻干擾信號由存入FPGA內部的ROM中的1/4正弦波采樣數據產生。
3.3 硬件平臺
羅蘭C系統模擬器硬件平臺采用上位機、下位機的系統架構,以一臺通用計算機為上位機,以一塊FPGA板卡和一塊D/A板卡為下位機,上、下位機通過PCIE總線進行數據通信,由濾波放大器對輸出信號進行整體濾波放大處理。系統的硬件框圖如圖5所示。

圖5 羅蘭C導航系統模擬器硬件框圖Fig.5 Hardware diagram of Loran-C navigation system simulator
通用計算機在Windows操作系統下工作,人機交互方便、軟件開發靈活,且計算機系統外設及接口豐富,能夠滿足不同數據傳輸方式的需求。FPGA作為可編程的硬件開發平臺,具有開發周期短、算法更新快的特點。采用通用計算機和FPGA板卡這種上、下位機系統架構的模擬器具有功能豐富、信號實時、開發靈活、升級方便等優點,且其研發成本也相對較低。
4 模擬信號驗證
模擬器上位機在通用計算機上采用VS2008平臺開發,下位機FPGA芯片采用Xilinx XC7K410T,基于ISE14.7平臺設計。模擬器系統用戶界面如圖6所示。

圖6 模擬器用戶交互界面圖Fig.6 User interface of the simulator
將模擬器輸出的模擬信號接入Tektronix TDS5054B示波器,捕捉的單脈沖信號波形如圖7所示,脈沖寬度200μs。模擬器設計時設定用戶運動速度不超過340m/s,相對系統100kHz的載頻和特殊的脈沖信號格式,用戶運動產生的多普勒頻移極小(不超過0.1Hz),在示波器上看不出明顯差異。
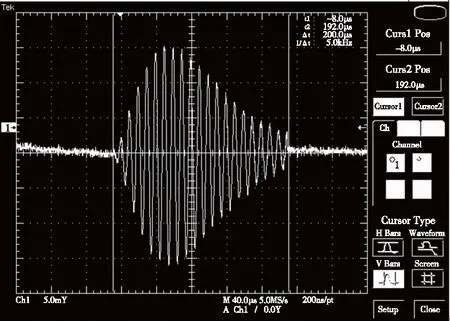
圖7 單脈沖信號波形圖Fig.7 Monopulse signal waveform
時差模式下,設置GRI為6000,主、副臺信號時差分別為15ms和35ms,模擬器輸出信號波形如圖8所示。

圖8 時差模式脈沖組波形圖Fig.8 The pulse group waveform of time difference mode
定位模式下,接收設備在北緯10°、東經110°處接收南海鏈信號,信號波形如圖9所示。左側脈沖組依次為賀縣、饒平、崇左三個信號臺發射的信號,由于接收設備距三個地面臺的距離不同,各脈沖組信號幅度有相應差異。

圖9 定位模式脈沖組信號波形圖Fig.9 The pulse group waveform of positioning mode
疊加天波信號的羅蘭C單脈沖信號在波形和持續時長上會發生變化,圖10、圖11分別是模擬疊加了39μs和45μs天波信號延時的單脈沖信號波形。
在示波器上,羅蘭C信號受環境噪聲(白噪聲)影響和受單頻干擾影響的信號波形基本相同,波形如圖12所示。
將經D/A轉換后的羅蘭C模擬器信號接入頻譜分析儀,設置頻譜分析儀中心頻率為100kHz,頻寬為40kHz時的信號頻譜如圖13所示,疊加單頻98kHz干擾時的信號頻譜如圖14所示。
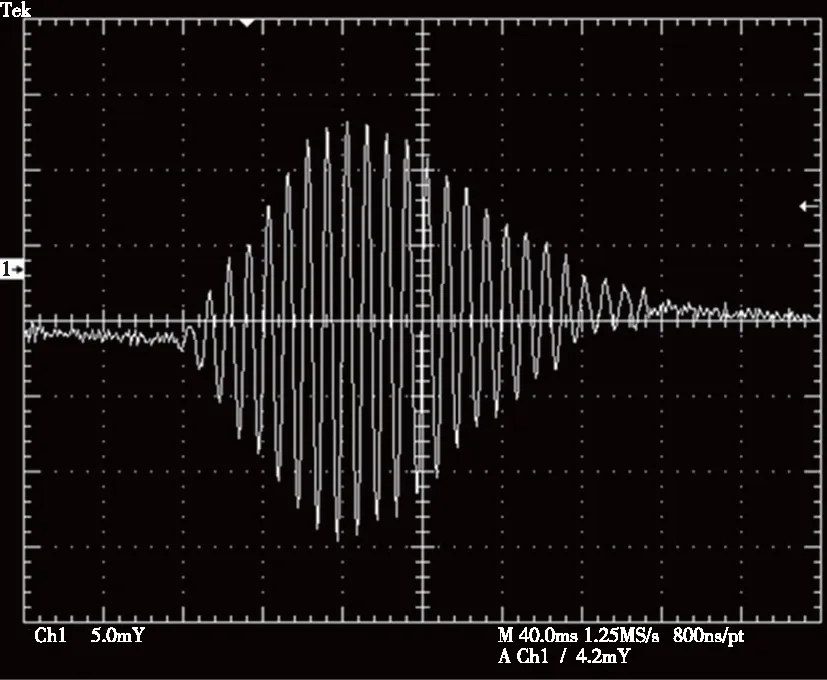
圖10 天波延時39μs的單脈沖信號波形圖Fig.10 Monopulse signal waveform with skywave delay 39μs
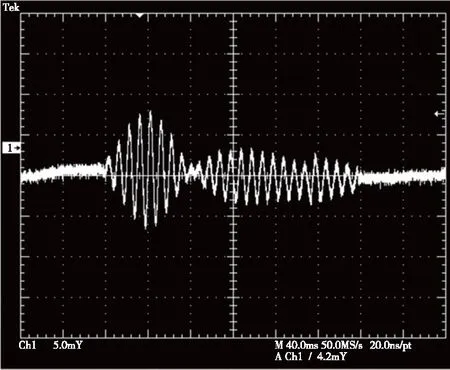
圖11 天波延時45μs的單脈沖信號波形圖Fig.11 Monopulse signal waveform with skywave delay 45μs
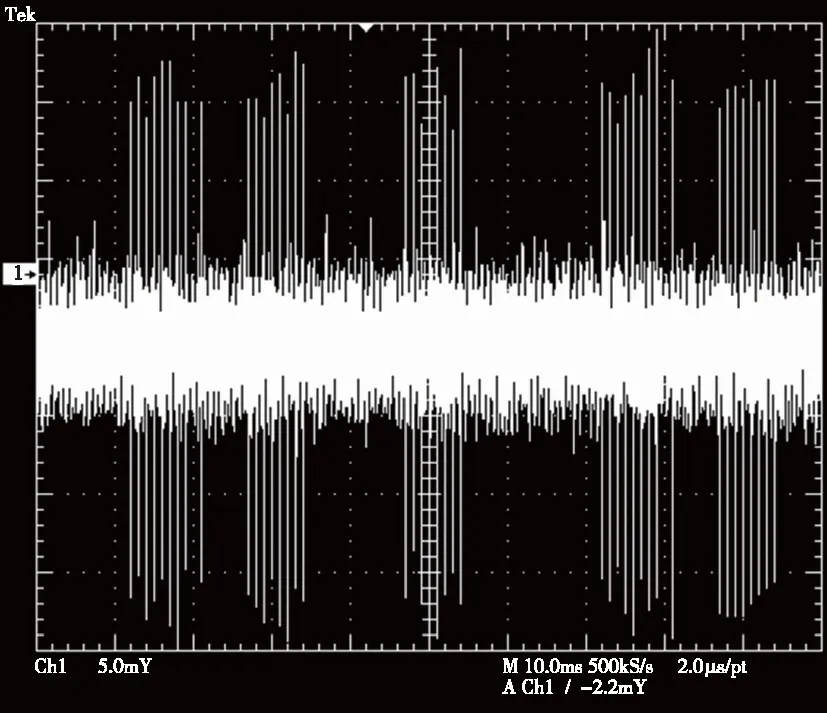
圖12 疊加噪聲干擾的脈沖組信號波形圖Fig.12 Pulse group signal waveform with noise interference

圖13 羅蘭C脈沖組信號頻譜圖Fig.13 Spectrum of Loran-C pulse group signal
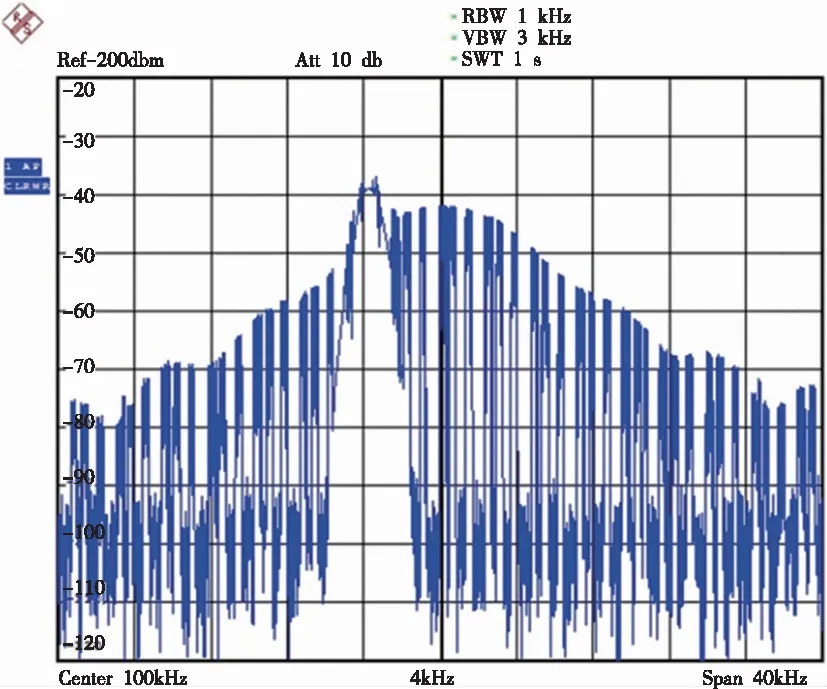
圖14 疊加98kHz單頻干擾的信號頻譜圖Fig.14 Spectrum of Loran-C pulse group signal with 98kHz interference
5 定位效果驗證
為檢測模擬器信號定位效果,實驗模擬產生了我國“長河二號”系統15個坐標點的定位信號,利用北京航空航天大學自研接收設備進行信號的接收和處理,定位結果見表2。實驗表明,模擬信號坐標與接收機定位坐標距離偏差平均為69.82m,標準差為70.25m,模擬信號符合羅蘭C導航系統定位精準度的要求。
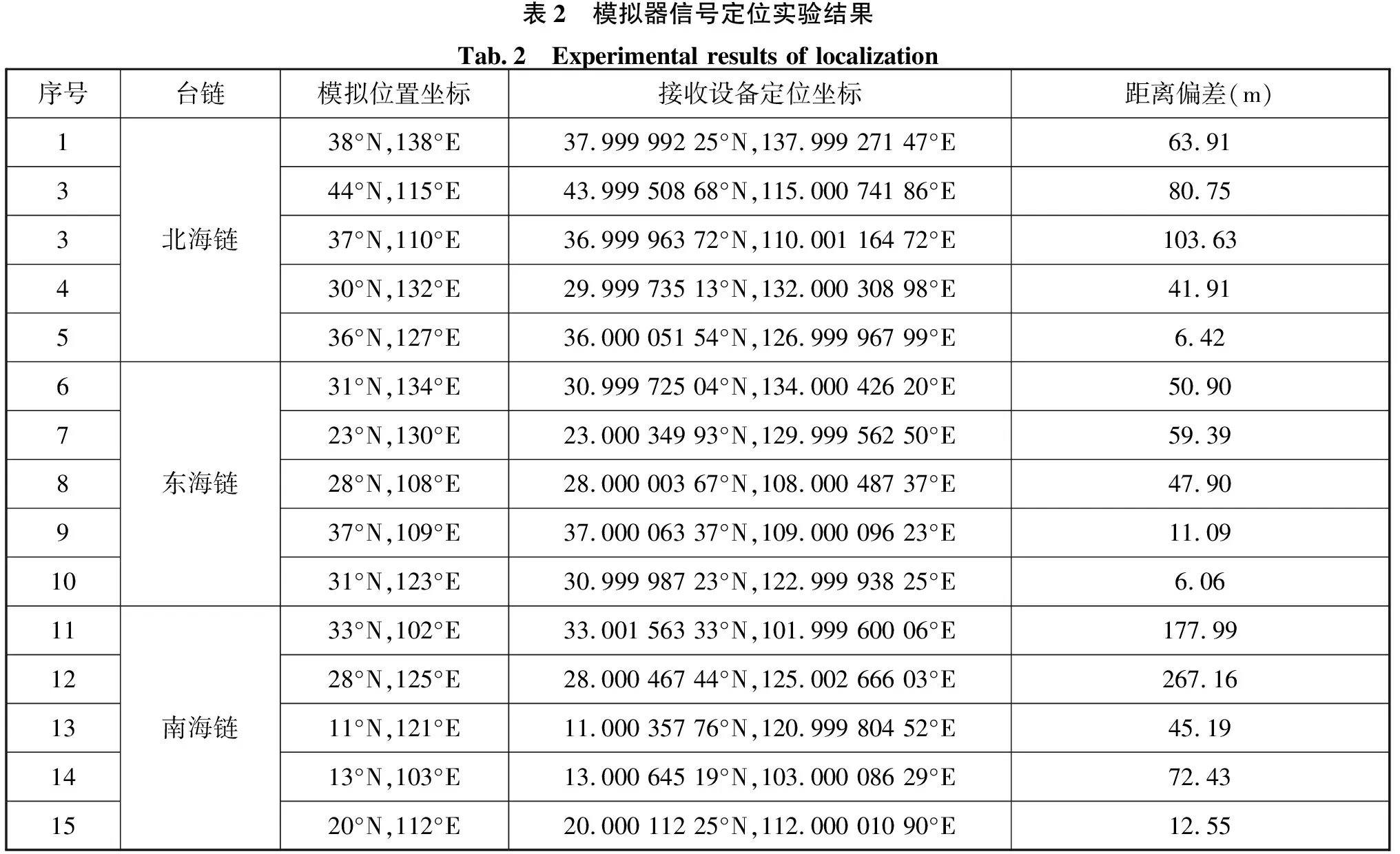
表2 模擬器信號定位實驗結果Tab.2 Experimental results of localization序號臺鏈模擬位置坐標接收設備定位坐標距離偏差(m)13345北海鏈38°N,138°E37.999 992 25°N,137.999 271 47°E63.9144°N,115°E43.999 508 68°N,115.000 741 86°E80.7537°N,110°E36.999 963 72°N,110.001 164 72°E103.6330°N,132°E29.999 735 13°N,132.000 308 98°E41.9136°N,127°E36.000 051 54°N,126.999 967 99°E6.426789101112131415東海鏈南海鏈31°N,134°E30.999 725 04°N,134.000 426 20°E50.9023°N,130°E23.000 349 93°N,129.999 562 50°E59.3928°N,108°E28.000 003 67°N,108.000 487 37°E47.9037°N,109°E37.000 063 37°N,109.000 096 23°E11.0931°N,123°E30.999 987 23°N,122.999 938 25°E6.0633°N,102°E33.001 563 33°N,101.999 600 06°E177.9928°N,125°E28.000 467 44°N,125.002 666 03°E267.1611°N,121°E11.000 357 76°N,120.999 804 52°E45.1913°N,103°E13.000 645 19°N,103.000 086 29°E72.4320°N,112°E20.000 112 25°N,112.000 010 90°E12.55
6 結束語
本文根據羅蘭C系統信號的特點,利用軟件無線電思想,設計實現了一種羅蘭C導航信號模擬器。該模擬器具有定位和時差工作模式,能夠較好模擬我國“長河二號”系統覆蓋范圍內的動目標定位信號、任意臺鏈信號及干擾環境信號。模擬器具有較強的通用性、可靠性和升級擴展能力。實驗表明模擬器產生的信號能夠被接收機識別并實現定位,各功能參數達到設計要求,滿足實際應用需要。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25