基于數字孿生的重型車輛行駛狀態預測研究
2021-08-19 03:52:12劉建敏董意張少亮劉艷斌
機械工程師 2021年8期
關鍵詞:模型
劉建敏,董意,張少亮,劉艷斌
(陸軍裝甲兵學院 車輛工程系,北京 100072)
0 引言
隨著化石能源的枯竭和排放法規的逐漸嚴苛,人們對于重型車輛油耗及尾氣排放的研究越來越深入。而行駛狀態直接決定著車輛的燃油經濟性和污染物排放特性,因此詳細研究車輛的行駛狀態對于節能減排及車輛性能的提升具有十分重要的意義。近年來,數字孿生技術的概念逐漸被大眾所熟知,該技術被洛克希德·馬丁公司視為國防工業6大頂尖技術之首,除了軍事領域,該技術還被廣泛應用于機械制造、智慧城市、能源材料等社會生產生活的各個方面。包括重型車輛在內的車輛行駛狀態與數字孿生技術的結合不僅可以大幅降低車輛的運行維護成本,還可以實現對車輛全壽命的控制和管理,應用前景非常廣闊,市場效益也尤為可觀。
郭具濤等[1]基于數字孿生技術建立了生產車間的整體架構及分層管理模式,提升了生產的效率和管理的精細化水平。Zheng Xu等[2]基于數字孿生技術建立了航空發動機的進排氣系統仿真優化模型,通過與實際的發動機進行數據交換,該孿生模型可以為制造過程中的關鍵部件參數優化提供指導,實際的運行數據證實了該優化的良好效果。Oleksiy Bondarenko等[3]建立了船舶柴油機的數字孿生模型并對其推進系統的性能進行了預測研究,該模型可以對柴油機的燃燒過程進行快速計算,從而實現了對整個船舶推進系統的精確控制和模擬。
本文基于高斯過程及深度卷積神經網絡建立了車輛行駛狀態的數字孿生模型,并對其狀態參數進行了預測研究,各部分的主要內容為:1)對數字孿生技術進行梳理總結;2)對測量車輛相關參數及行駛狀態的實驗進行介紹;3)利用高斯過程及深度卷積神經方法建立了車輛行駛狀態的數字孿生模型;4)對計算結果進行分析,最后對全文工作進行總結并對下一步的工作進行展望。
1 數字孿生技術
近年來,基于物理實體、虛擬模型及兩者之間耦合的數字孿生技術[4]得到了廣泛的關注。數字孿生的概念最初由Michael Grieves等提出,隨后被應用于交通運輸、能源電力、設計制造等工業領域,前景不可限量。本文利用實車獲取的數據及機器學習算法建立了車輛的行駛狀態數字孿生模型,對車輛的行駛速度和轉矩進行預測和分析。
數字孿生的關鍵技術主要分為三部分,分別是數據獲取與傳輸、孿生模型的建立及數字模型與實體之間的交互[5]。三者之間的關系如圖1所示。
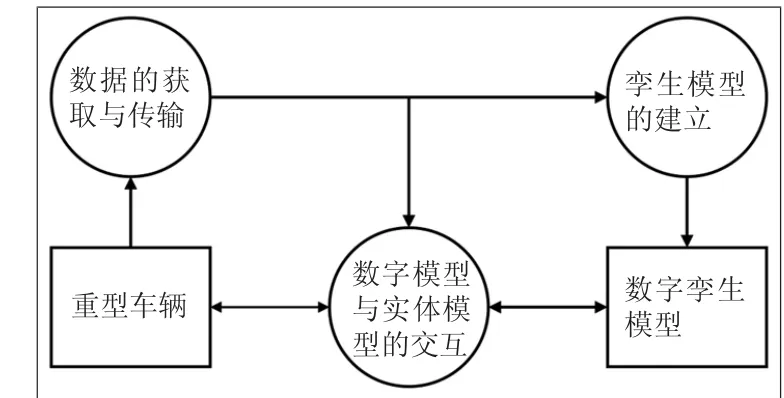
圖1 數字孿生及其關鍵技術示意圖
數據是構建孿生模型的基礎,是連接實體和孿生模型之間的橋梁,因此數據的獲取與傳輸至關重要。一般而言,獲取的數據越多,傳輸間隔越短,則數字孿生模型的精度越高。本文主要研究重型車輛的行駛狀態,孿生模型的建立和交互過程中涉及到的數據包括車輛的行駛數據、傳動系統及動力系統數據、天氣狀況等,其中數據的獲取需要通過相關傳感器實現。
孿生模型一般分為兩類,一種是抽象意義上的模型,另外一種是具有實際物理意義的模型。對于前者來說,不需要涉及實體的相關知識和概念,僅僅借助于人工智能等技術和算法即可建立。對于后者,則需要在深入了解實體工作原理和工作過程的基礎上建立孿生模型。由于在實際工作過程中影響實體的因素和參數較多,因此在建立具有實際物理意義的模型時必然伴隨著對參數的取舍及簡化,這就需要對重要參數和關鍵條件進行確定,從而平衡模型的復雜度和精確度之間的關系。
孿生體與實體之間的交互是數字孿生技術區別于普通仿真模型的重要特點之一,這種交互可以分為實時交互和非實時交互。實時交互對于數據的傳輸速度、模型的計算速度等軟硬件條件要求較高,隨著5G通信及云計算等技術的推廣和普及,基于實時交互的數字孿生技術的應用范圍會越來越廣。受限于數據傳輸的速度和計算機的計算能力,本文所研究的孿生模型是基于非實時交互技術進行的。
2 車輛行駛狀態實驗研究
本文主要研究車輛的行駛狀態,因此主要對車輛的行駛參數、傳動系統及動力系統的相關參數進行測量研究。車輛行駛的參數主要包括行駛速度、主動輪傳動軸的轉矩(下文簡稱轉矩)及天氣狀況等,傳動系統的主要參數包括變速箱的擋位、離合器的狀態等,動力系統的主要參數包括柴油機的轉速、加油齒桿位置、進排氣門的開度、冷卻水泵的流量、缸體冷卻液出口溫度等。
2.1 參數的測量
對行駛參數進行測量的過程中,車輛的行駛速度可通過隨車安裝的北斗導航模塊測量得到,天氣狀況可通過實驗的過程中隨車觀察并記錄得到。天氣狀況分為車輛行駛方向的風速及溫度,兩個參數均可以通過隨車安裝的傳感器測試得到。下面對轉矩的測試方法進行簡要介紹。
工作過程中主動輪的傳動軸一直在高速轉動,為了實時準確測量此處的轉矩數據,設計開發了一套轉矩測量裝置,該裝置通過固定在傳動軸上的應變片與無線傳輸裝置,可以將測量得到的轉矩數據實時傳輸到車輛外部的接收單元中,從而實現轉矩的實時測量與傳輸,具體裝置如圖2所示。傳動系統及動力系統的主要參數可以通過車上安裝的行車記錄儀及傳感器測量得到。
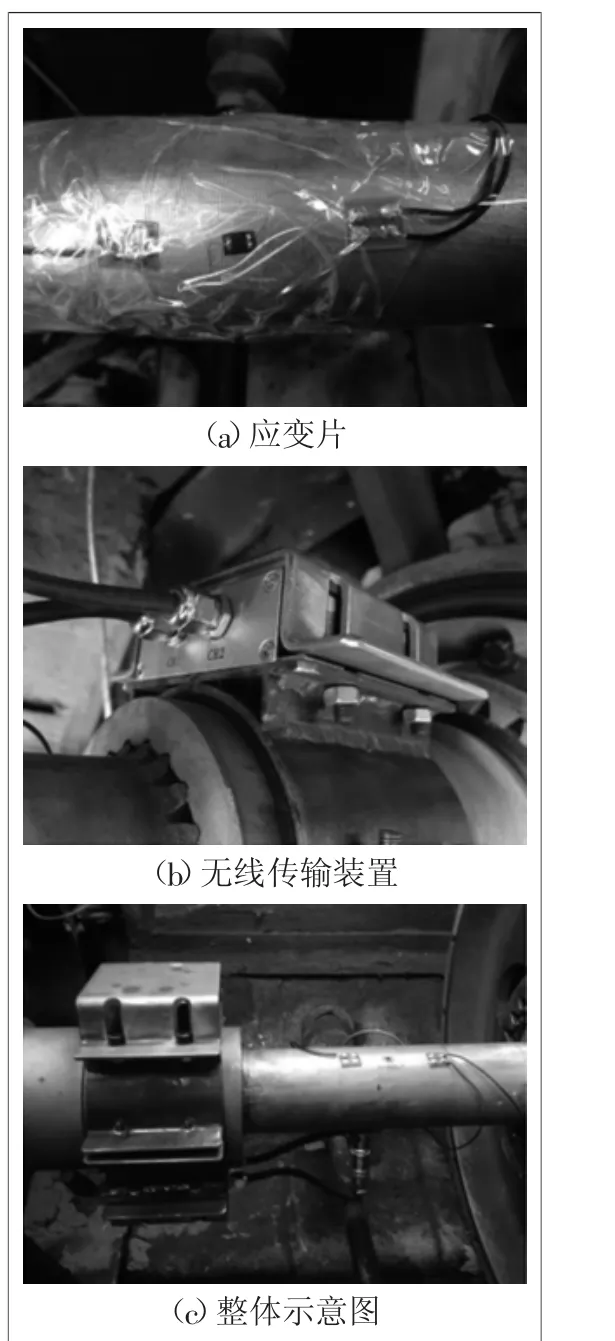
圖2 轉矩測量裝置
2.2 測量結果
本文主要基于所建立的數字孿生模型對車輛行駛過程中的速度和轉矩進行分析。下面對測量得到的與兩個參數直接相關的部分數據進行展示,測量得到的柴油機轉速隨時間的變化規律如圖3所示,車輛行駛速度隨時間的變化規律如圖4所示,轉矩隨轉速的變化規律如圖5所示。
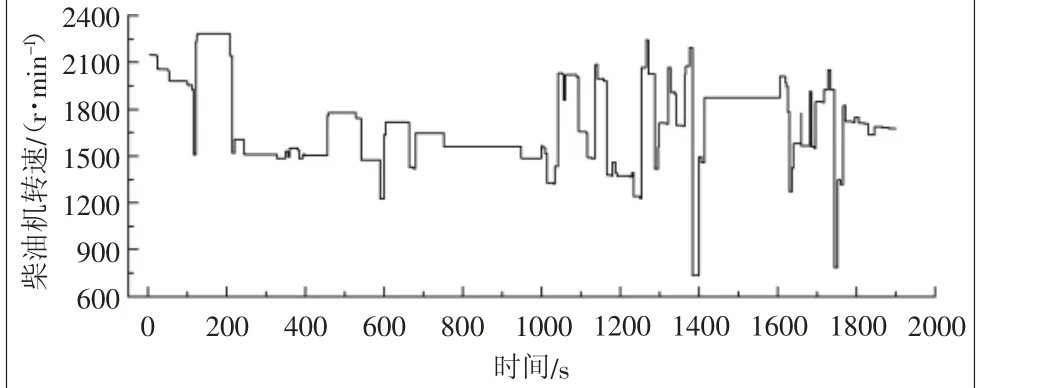
圖3 測量得到的柴油機轉速隨時間的變化規律
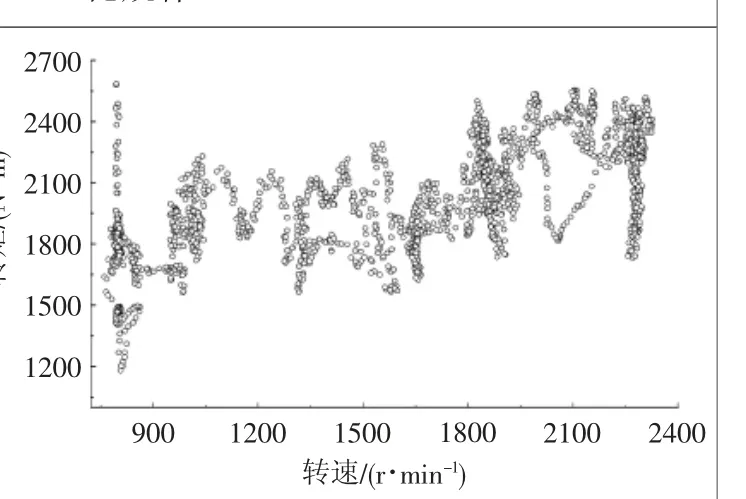
圖4 測量得到的車輛行駛速度隨時間的變化規律
3 車輛性能的數字孿生模型
3.1 各個參數之間的物理關系
本文主要基于車輛行駛狀態的相關參數建立孿生模型來對車輛的行駛速度及轉矩進行預測分析。各個參數之間的物理關系[6]如下:
式中:Tv為車輛主動輪連接軸的轉矩;V為車輛的行駛速度;nd為柴油機的轉速;Ev為車輛行駛的環境條件,如環境溫度、車輛行駛方向的風速等;OS為車輛的運行參數,如加油齒桿位置、傳動箱的擋位等;pe為柴油機功率;Te為柴油機的轉矩;R為車輛的行駛阻力。
3.2 基于高斯過程的數字孿生模型
3.2.1 貝葉斯模型
式(1)~式(5)說明了車輛及柴油機相關參數之間的物理關系,利用上述關系可以得到:nd和pe共同決定了當前時刻的Te,Te和Tv共同決定了下一時刻的nd;Tv及R共同決定了當前時刻車輛的加速度ae,進而決定了V和下一時刻的Tv。
因此建立車輛轉矩和速度的條件概率函數如下:
利用上述公式可以將計算p(Tv,V│nd,Ev,OS)的工作分解為對p(Tv│V,Ev,OS)及p(V│nd,Ev,OS)的計算。
3.2.2 高斯過程
高斯過程[7](Gaussian Process)是一種基于貝葉斯定理的機器學習方法,該方法的優點在于其模型靈活性很高,可以得到計算結果的后驗概率表達式,可以有效抑制輸入噪聲等。
高斯過程的基本原理為:對于數據集S={(Xi,yi)│i=1,2,…,N},X=[x1,x2,…,xN]為輸入向量,y=[y1,y2,…,yN]為輸出向量,基于貝葉斯定理,可以通過函數f來建立X與y之間的關系y=f(X,w)+ε。其中:w為系數向量,ε為噪聲信號。其中包含f參數的后驗概率密度函數為:
式中:p(S│w)為似然函數;p(w)為先驗概率密度函數;p(S)為與輸入輸出有關的常量。
高斯過程中樣本函數的聯合分布由其均值和方差來確定:
式中:μ為均值向量;∑(N×N)為對應于所選取核函數的協方差矩陣。
對于高斯回歸過程f(x),其均值函數和核函數的定義分別為:
因此高斯過程可以記為

對于已知的訓練樣本數據,均值函數用來表示數據中的確定性成分,核函數用來表示非確定性成分。本文在計算過程中選取0均值函數來代表經過處理的訓練樣本數據。
高斯過程中的概率分布取決于核函數的形式,而核函數代表的是輸入與輸出數據之間的關系。本文選取神經網絡核函數進行計算:
式中,l代表輸入數據之間的尺度因子。
3.3 基于DCNN的數字孿生模型
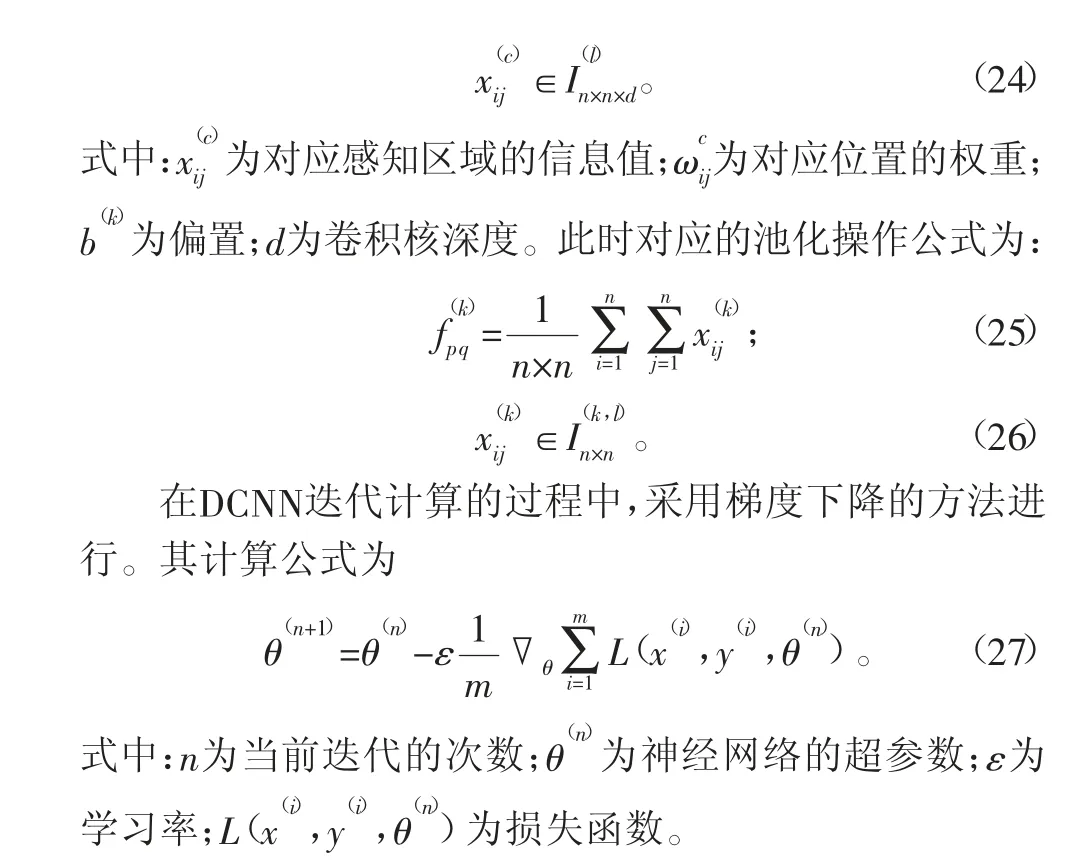
深度卷積神經網絡[8](Deep Convolutional Neural Network,下文簡稱DCNN)是一種被廣泛應用于語音和圖像識別領域的深度學習算法。本文利用DCNN建立車輛行駛狀態的數字孿生模型,其輸入參數為環境參數(溫度和風速)、傳動系統參數(變速箱擋位、離合器狀態)和動力系統參數(柴油機轉速、加油尺桿位置、進排氣門開度、冷卻水泵流量和缸體冷卻液出口溫度等),輸出參數為車輛的行駛速度和轉矩。輸入參數和對應的特征值都是隨時間變化的數值序列,因此利用訓練后的DCNN孿生模型進行預測的時候,輸入參數和輸出的特征值仍然為隨時間變化的數值。
輸入數據進行訓練和預測之前,通過下式將數據進行歸一化處理:

式中:x*為經過歸一化處理后的數據;xi為原始數據;xmin為數據的最小值;xmax為數據的最大值。經過上式處理后,所有的輸入參數均為介于[0.3,0.7]之間的數據。
在DCNN的訓練和預測過程中,輸入參數為m×n的矩陣,這種輸入參考了圖像識別中圖像的輸入方法。計算中的卷積運算公式為:

3.4 損失函數
根據相關先驗知識,車輛的行駛速度與柴油機的轉速大致呈現正相關的關系,即柴油機轉速越高則車輛的行駛速度越大。為了保證利用高斯過程及DCNN預測得到結果的準確性和合理性,將上述關系引入到損失函數中。其定義如下:
4 數字孿生模型的驗證與評估
分別利用高斯過程模型和DCNN模型對數據進行訓練,而后對車輛的行駛狀態數據進行預測。利用Rm(Root Mean Square Error)和Nr(Normalized Root Mean Square Error)兩個指標對訓練結果進行評價。其計算公式為:
式中:Yi為預測值;Yi為實驗值;N為數據的總個數;Y為Yi的平均值。
4.1 孿生模型的驗證
4.1.1 車輛的行駛速度
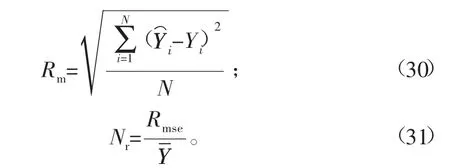
表1所示為兩種數字孿生模型預測結果的Rm和Nr值分析。從表中可以看出:基于高斯過程的數字孿生模型預測精度較高,相比于驗證數據,訓練數據的Rm和Nr值更小,說明預測誤差更低。
表1 車輛行駛速度預測評價指的標對比
圖6所示為1600~1700 s時間段內車輛行駛速度實驗值與預測值的比較,從圖中可以看出,兩者的預測值與實驗值均差別不大。在1600~1630 s時間段內,基于DCNN的數字孿生模型預測精度較高,在1630~1690 s時間段內,基于高斯過程的數字孿生模型預測精度較高。綜合表1和圖6的結果可以看出,基于高斯過程的數字孿生模型對于車輛行駛速度的預測精度較高。
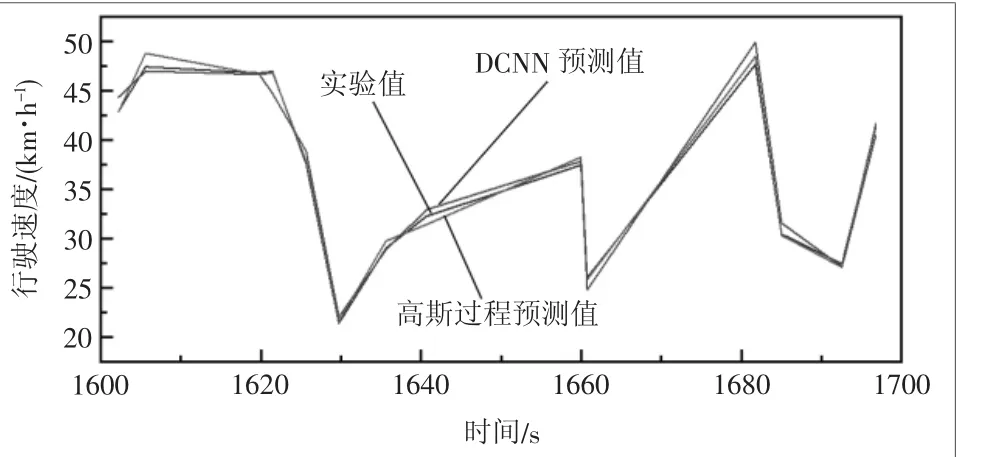
圖6 車輛行駛速度實驗值與預測值的比較
4.1.2 車輛的轉矩
表2所示為兩種數字孿生模型對轉矩預測結果Rm和Nr值的對比分析。從表中可以看出,與對車輛的行駛速度預測結果類似,高斯過程對于車輛轉矩的預測結果要優于DCNN方法的預測結果。從表2中還可以看出,不論是高斯過程還是DCNN方法,其訓練數據的評價指標均優于驗證數據的指標。
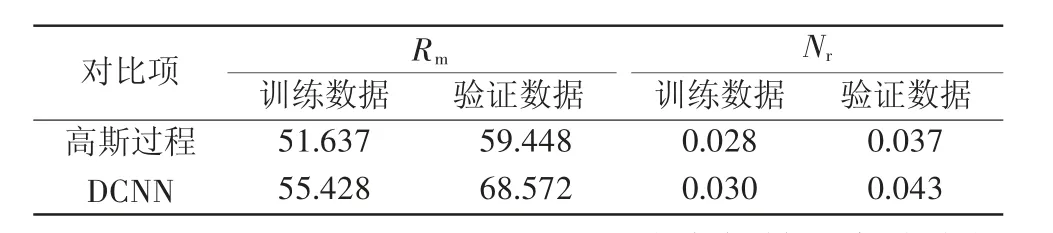
表2 車輛轉矩預測評價指標對比
圖7所示為1000~1400 s時間段內車輛轉矩實驗值與預測值之間的對比。從圖中可以看出,不論是高斯過程還是DCNN方法,其預測結果與實驗值的吻合均較好,但是在一些短時間內轉矩波動較為劇烈的情況下,基于DCNN方法的數字孿生模型對于轉矩的預測效果要差于高斯過程。
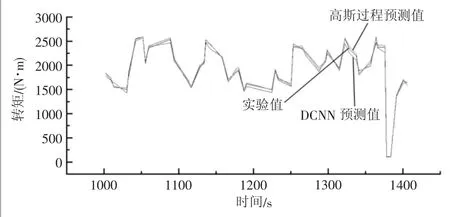
圖7 車輛轉矩的實驗值與預測值對比
綜合表2和圖7的結果,可以發現基于高斯過程的數字孿生模型對于車輛轉矩的預測結果較好。
4.2 孿生模型的評估
圖8所示為利用高斯過程和DCNN兩種不同的方法對車輛行駛狀態孿生模型進行訓練時得到的殘差曲線。
從圖8中可以看出,除了初始訓練的前50步,在迭代次數小于200 時,基于DCNN方法的孿生模型計算殘差較小,當迭代次數大于200時,基于高斯過程的孿生模型殘差較小。
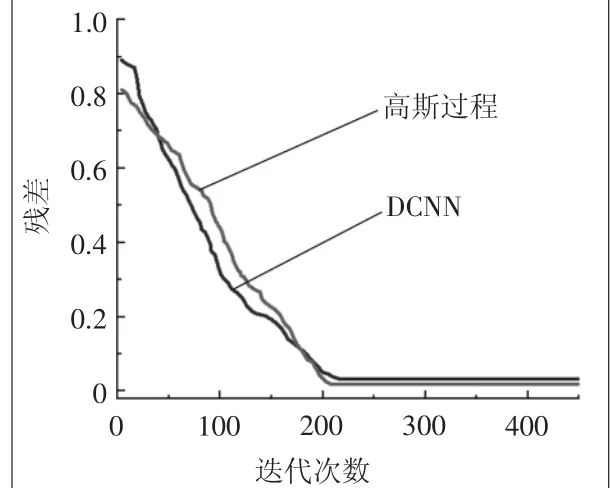
圖8 模型訓練過程中的殘差曲線
通過上述計算結果可以看出,當將孿生體用于對物理實體的控制和優化時,由于允許的計算時間較短,可以選用殘差值較小的DCNN方法所建立的孿生體進行;而當應用場景為利用孿生體對物理實體的工作狀態進行預測等時間要求不嚴格的場合時,利用高斯過程所建立的孿生體模型更為適合。
5 結語
為了詳細研究車輛的行駛狀態,利用相關機器學習算法建立了車輛工作過程的數字孿生模型,并基于實驗數據對其行駛速度和轉矩進行了預測分析,完成的主要工作包括:1)對車輛的相關參數進行了實驗測量,主要包括車輛的行駛狀態(車輛的行駛速度和轉矩),傳動系統參數(變速箱的擋位和離合器的狀態),動力系統參數(柴油機轉速,加油齒桿位置,進排氣門的開度,冷卻水泵的流量,缸體冷卻液出口溫度),以及環境條件(環境溫度,車輛行駛)等。2)基于高斯過程及車輛傳動的物理模型建立了車輛行駛狀態的數字孿生模型,該模型利用實驗得到數據對參數進行訓練和調整,并利用條件概率密度函數求取車輛行駛的速度和轉矩數據。3)基于深度卷積神經網絡建立了基于車輛相關參數對行駛狀態進行預測的數字孿生模型,該模型將輸入參數轉化為矩陣的形式,利用實驗得到的數據對神經網絡中的參數進行訓練,并輸出預測得到的車輛行駛速度和轉矩數據。4)預測結果顯示,迭代次數足夠大時基于高斯過程的數字孿生模型對于車輛的實際行駛狀態預測較準。當計算時間較短時,基于深度卷積神經網絡的數字孿生模型殘差較小、預測精度較高。
本文利用所建立的孿生模型對車輛的行駛狀態進行了預測分析,但是所建立的數字孿生模型只實現了孿生體對物理實體的映射,而沒有體現兩者之間交互的功能,在下一步的計算中,會著重對以下問題進行分析:1)利用實驗測量得到的車輛行駛狀態相關參數對孿生模型進行更新,使之對于車輛實際工作狀態的預測更加精準,同時利用5G網絡、云計算等技術實現物理實體與孿生模型之間數據的實時傳輸與控制;2)利用相關控制技術和優化算法實現數字孿生體對物理實體的控制,主要通過孿生體計算得到的結果來控制車輛的動力和傳動系統,以提高其動力性和經濟性;3)充分考慮高斯過程和DCNN方法的計算精確度與迭代收斂時間之間的平衡,在不同的場景下應用不同算法所建立的數字孿生模型,從而體現數字孿生技術的優勢。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
