上下料機械手的設計及關鍵零件的動靜特性分析
2021-08-19 03:52:04陳凱劉巍巍
機械工程師 2021年8期
陳凱,劉巍巍
(沈陽工業大學 機械工程學院,沈陽 110870)
0 引言
隨著社會的進步,越來越多的生產企業采用機器人或者機械手來代替人工進行作業。機械手大部分情況都是出現在生產線中,用來代替人工完成待加工零件或者物料的空間轉移。由于其效率高、安全性高、生產質量好等優點受到企業青睞。本文設計了一款三自由度桁架式機械手,其可以完成加工設備所需的上下料作業,可以承載較重的物料,并且其安全性可以得到保證[1-4]。
1 桁架機械手的主要結構
本文設計的機械手主要結構包括立柱、X軸、Z軸、末端執行器等,如圖1所示。機械手的立柱主要起到支撐和固定的作用,在地面固定時使用地腳板組合增加抓地力,在頂端、側面連接位置添加加強筋防止立柱的變形。選用1060鋁合金作為主要的材料,立柱截面尺寸為250 mm×250 mm,厚度為10 mm,高度為3250 mm。在機械手的頂部有過渡件實現立柱與X軸的連接。
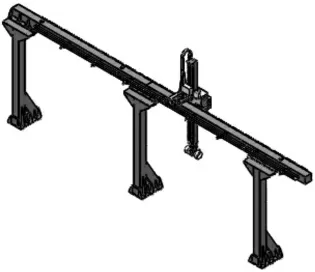
圖1 三自由度桁架式機械手
X軸主要起到支撐機械手末端執行器和Z軸左右運動的作用。由于X軸水平方向上整體跨距較大,負載的重力大,因此選用截面為180 mm×240 mm、厚度為10 mm的1060鋁合金,X軸側面安裝有兩條起導向和支撐作用的導軌和傳動齒條,并且在鏈條的末端安裝防撞塊,在X軸的頂面安裝感應開關。在X軸的后側面通過過渡裝置,連接走線槽,走線槽內主要放置的是電動機線和信號線。為了提高X軸的承載能力,X軸的內部安裝加強筋。
機械手在X軸上通過傳送機構進行反復的直線運動,在X軸的水平傳送機構中其有齒條、齒輪、導軌、滾輪、過渡鏈接板等組成,其中齒條是通過內六角螺栓拔合到桁架的T形鍵槽上,利用電動機作為驅動的動力源,通過減速器減速增扭,驅動齒輪轉動,從而帶動Z軸實現整個手臂和抓取的物料沿水平方向進行直線運動。圓柱滾輪與過渡連接掛板之間通過內六角螺栓連接,滾柱和導軌除具有導向作用外還承受整個Z軸和工件的重力,電動機提供驅動力克服導軌和滑塊之間由重力產生的摩擦力。
Z軸的主要作用是完成機械手的上升和下降運動。用電動機作為驅動,通過減速器減速增扭,驅動齒輪轉動帶動Z軸手臂實現豎直方向的上下運動。材料選用1060鋁合金,橫截面規格為100 mm×150 mm,厚度為5 mm,高度為2900 mm。Z軸上安裝光電開關、導軌、齒條、防撞塊、線槽、固定板、掛板。
機械手的末端執行器如圖2所示,整個機械手末端執行器通過過渡件完成與Z軸的連接,并且末端執行器可以實現繞Z軸轉動。末端執行器通過電動機作為驅動,經過減速器傳遞轉矩,通過滾珠絲杠將圓周運動轉換成直線運動,以完成其對物料的抓放。

圖2 末端執行器
2 桁架機械手支撐件的動靜特性分析
2.1 靜態分析
桁架機械手的立柱及Z軸是整個結構的主要承重件,其承載能力是整個機械手能否正常工作的基礎。因此,分析機械手在工作的過程中承重件的應力及位移是十分必要的。根據力學基礎可知當機械手的X軸及末端執行器位于Z軸的正中位置進行運動的時候,Z軸的承受最大力。由于該機械手由4根立柱支撐,跨度越大,Z軸的變形越大,為確保機械手的承載能力,因此選用跨度最大的2根立柱之間的架體進行分析。
將SolidWorks創建的機械手模型,導入到ANSYS Workbench中。為降低仿真計算的復雜性,將模型中的倒角、螺紋孔等特征刪除。簡化模型如圖3所示。
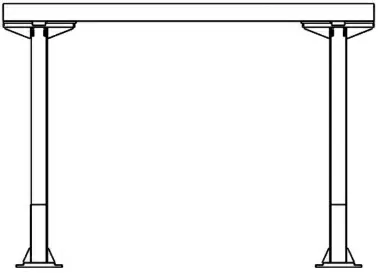
圖3 簡化模型圖
機械手的Z軸主要經過焊接而成,其材料選用1060鋁合金,其密度為2700 kg/m3,屈服強度為90 MPa(0℃),簡化模型劃分的網格,選用六面體網格,立柱采用固定約束。
位移云圖如圖4所示,根據位移云圖分析結果可知X軸在整個機械手工作的過程中中心位置變形量最大,最大變形為0.234 13 mm。兩根立柱之間的距離是3100 mm,變形量相比兩根立柱之間跨度較小,不會對機械手的運轉產生影響。
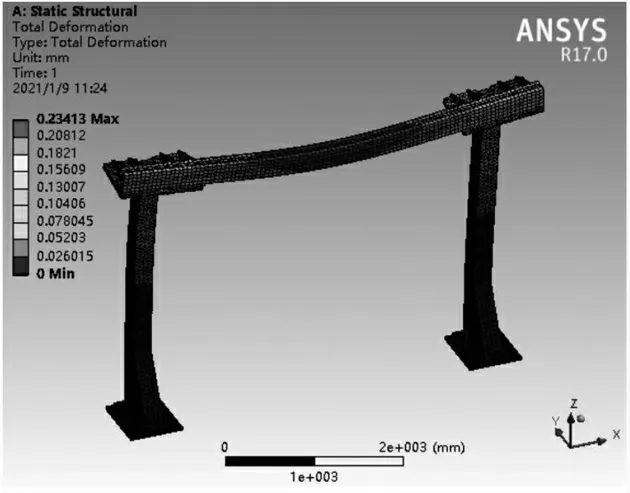
圖4 位移云圖
應力云圖如圖5所示,由應力云圖分析結果可知在機械手工作的過程中,X軸最大承受17.489 MPa的力,最大承受力遠低于材料的屈服極限,所以該設計滿足強度需求。安全系數如圖6 所示,X軸的變形屬于彈 性 變形,最小安全系數大于1,因此機械手在該工況下滿足使用需求。
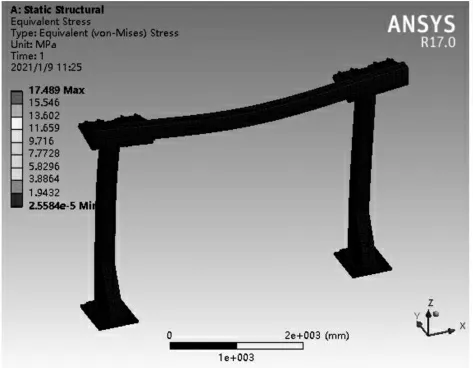
圖5 應力云圖
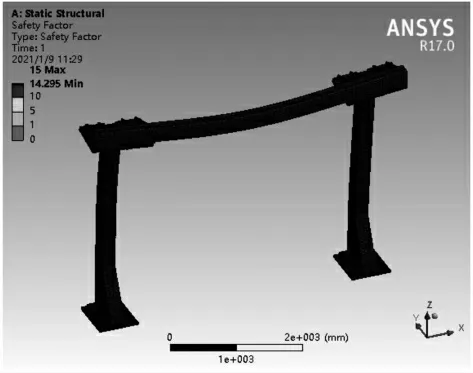
圖6 安全系數
2.2 模態分析
模態分析是一種反映機械系統性能的指標,主要用來確定整個機械系統的固有頻率和相應的振型,也可以用來確定機械系統的損傷。由于機械手工作的驅動力頻率不高,只需要考慮前幾階模態是否有發生共振的情況,所以只取前六階模態進行分析,驗證機械手結構的合理性。
根據圖8所示,機械手一階到六階的振動頻率主要分布在11~37 Hz范圍內。振動幅度最大為1.4 mm,最小約為0.6 mm,其第一階的模態振型表現為X軸向下傾斜,其第二階的模態振型表現為第一根立柱向右傾斜和第三根立柱向左傾斜,其第三階的模態振型表現為整體向左傾斜,其第四階的模態振型表現為第二根立柱向左傾斜X軸向下傾斜,其第五階的模態振型表現為第四根立柱向右傾斜,其第六階的模態振型表現為X軸向下傾斜。根據分析結果可以適當提高變形較大零部件的材料規格。
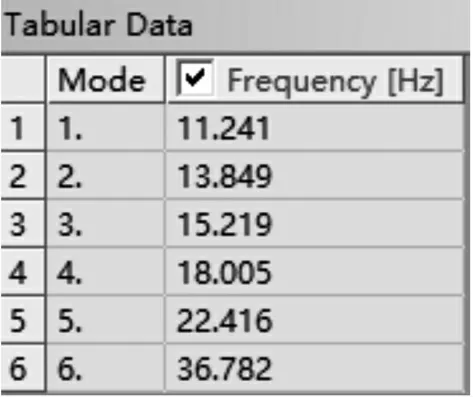
圖7 前六階模態值
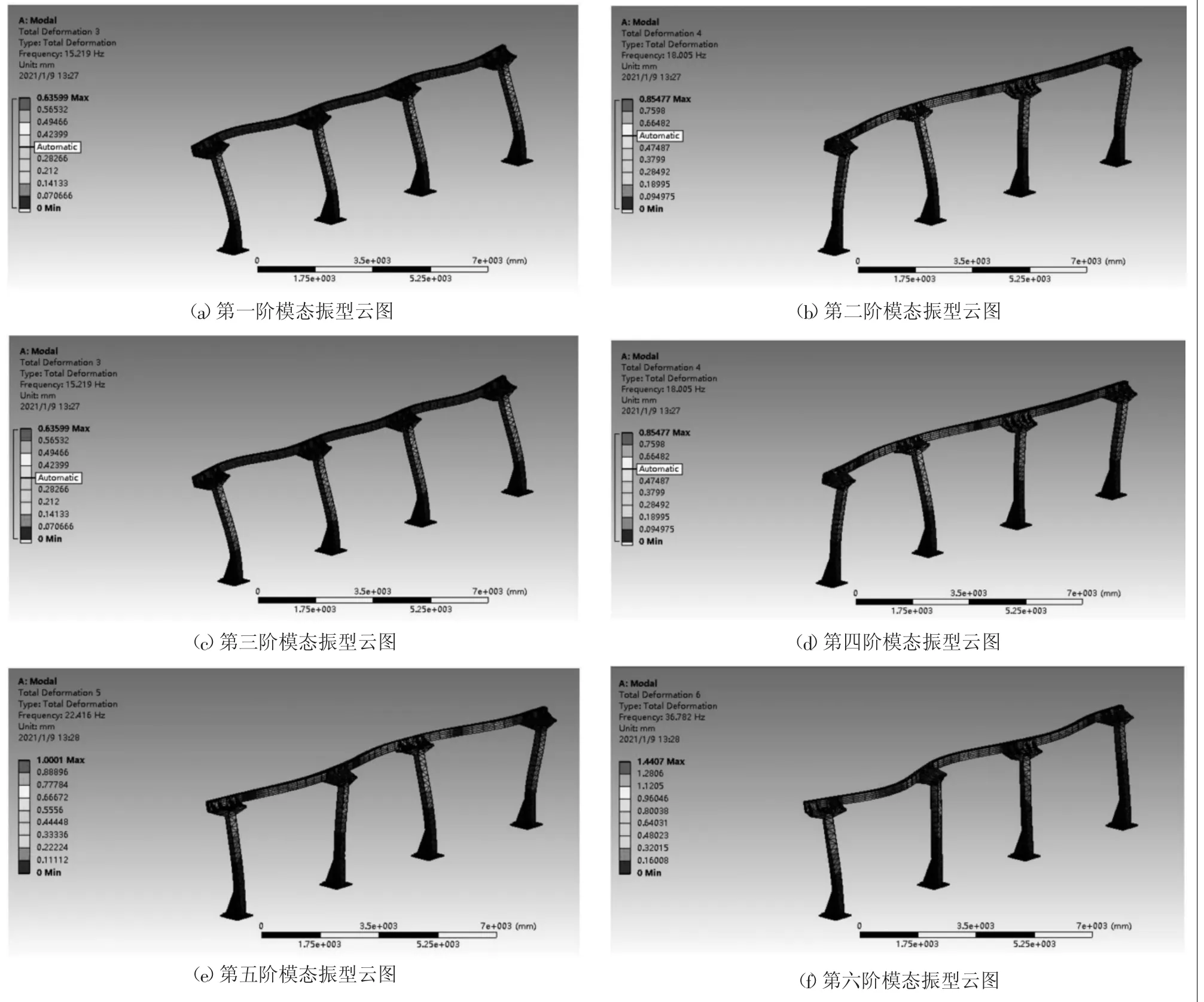
圖8 機械手前六階振型云圖
3 結論
桁架式機械手在工廠應用較廣,其可以使勞動量較大上下料工作變得簡單迅速。本文主要介紹了桁架機械手的主要結構,另外對機械手的主要支撐件進行了動、靜態分析,驗證了設計的合理性和安全性。
猜你喜歡
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
中華詩詞(2020年1期)2020-09-21 09:24:52
電子制作(2018年18期)2018-11-14 01:48:24
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
山東工業技術(2016年15期)2016-12-01 05:31:22
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:39
