基于Robotics Toolbox的打磨軌跡擬合與仿真研究
2021-08-19 03:51:48鄭博濤
機械工程師 2021年8期
鄭博濤
(遼寧楓泰實業有限公司,遼寧 營口 115004)
0 引言
壓力容器縱、環焊縫的打磨通常都是工人手持工具完成,由于工作環境惡劣,往往對工人的健康帶來了傷害,因此研究工業機器人代替工人完成壓力容器的縱、環焊縫打磨是必要的。為使工業機器人能夠較為精準地完成打磨任務,對機器人的打磨軌跡規劃是必不可少的。所謂軌跡規劃,就是根據工業機器人具體的約束條件和實際所要經過的路線,人為地設計一條最大程度上接近目標曲線的軌跡。壓力容器的縱焊縫是一條空間直線,環焊縫是一個平面圓弧,所以,只需研究工業機器人的空間直線與圓弧軌跡即可。通過建立FANUC公司的R-2000iB/165型號工業機器人的運動學方程,使用Robotics Toolbox建立了機器人三維模型,并在機器人工作空間內分別對直線和圓弧軌跡進行了軌跡擬合,為工業機器人打磨壓力容器縱、環焊接的研究提供了算法依據和理論基礎。
1 機器人D-H參數及運動學方程
R-2000iB/165型號工業機器人如圖1所示,通過D-H法則建立機器人連桿坐標系如圖2所示。
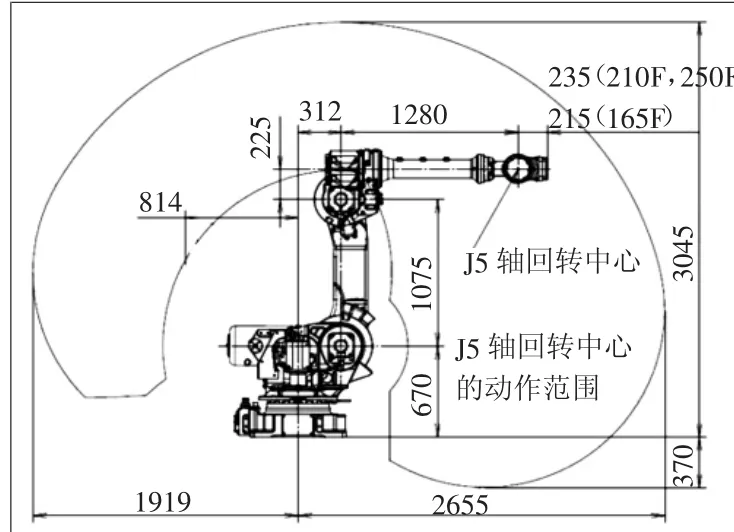
圖1 R-2000iB/165工業機器人
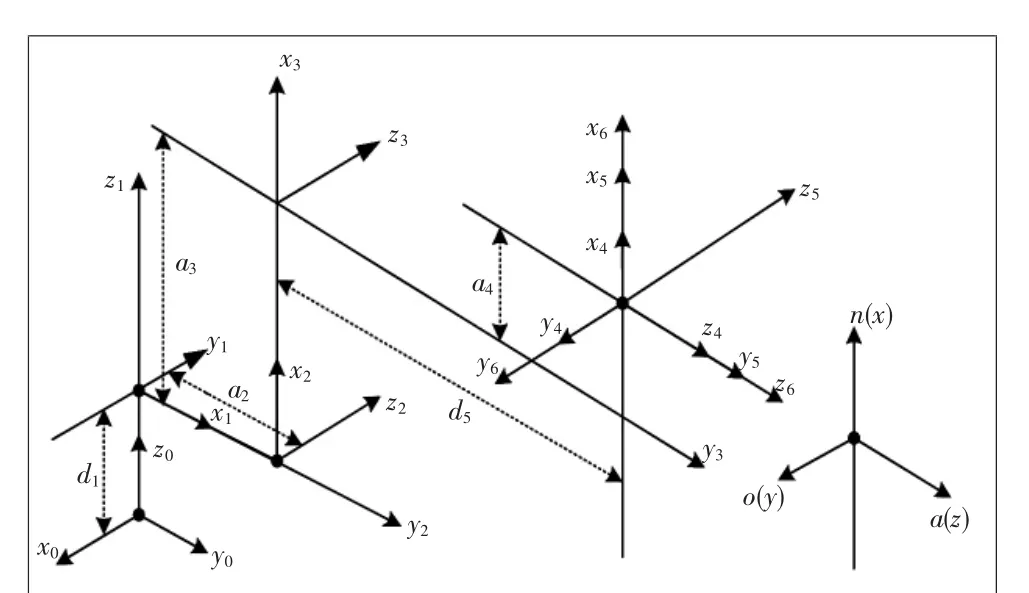
圖2 機器人連桿坐標系
使用參考文獻中的方法確定D-H參數:關節轉角θi、連桿扭角αi-1、連桿長度ai-1和連桿偏距di[1-2],如表1所示。
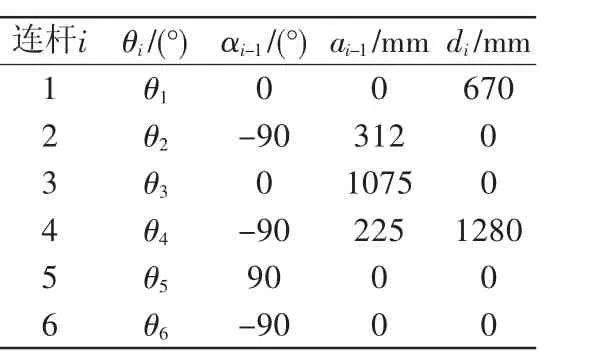
表1 機器人D-H參數
由上述所得的D-H參數可建立如下的運動學方程[3-5]:

2 MATLAB下機器人三維建模
通過調用Robotics工具箱下的函數語句(如圖3),建立機器人三維運動模型(如圖4),然后便可對軌跡規劃進行仿真[6-10]。
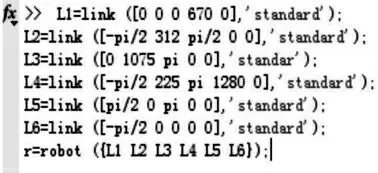
圖3 機器人三維建模
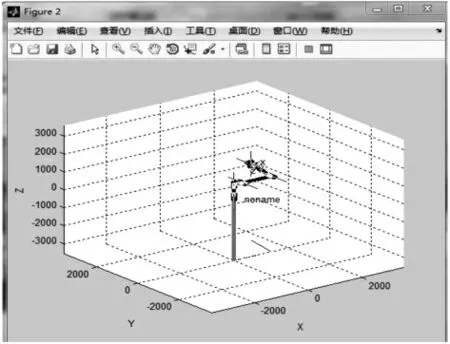
圖4 機器人三維模型
3 基于Robotics Toolbox的直線、圓弧軌跡仿真
3.1 直線規劃
設直線在空間中的起始點為T1=transl(764,1315,1463),終止點為T2=transl(746,1455,1463)。使用機器人工具箱對兩點間進行直線擬合,具體程序如圖5所示,擬合出的直線如圖6所示。
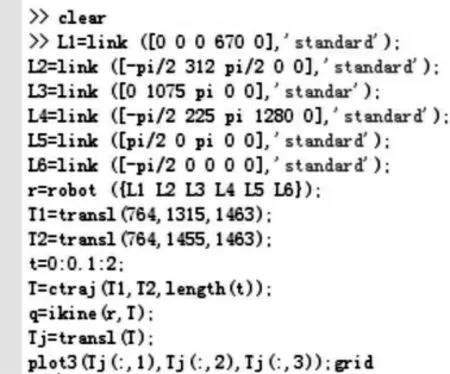
圖5 直線擬合程序
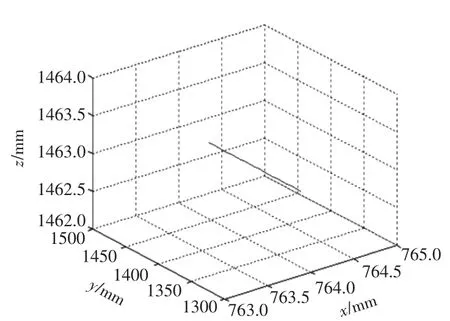
圖6 擬合空間直線
通過調用圖7程序可觀察在擬合過程中各個關節角的變化情況(如圖8)。
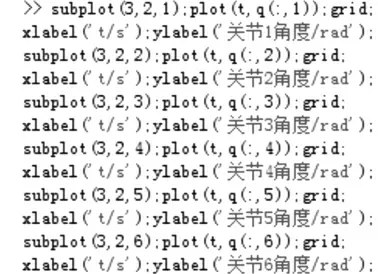
圖7 求各個關節角的MATLAB程序
通過觀察圖8不難發現其各個關節的角度變化都是光滑連續的,其各個關節角的具體變化數值如圖9所示。
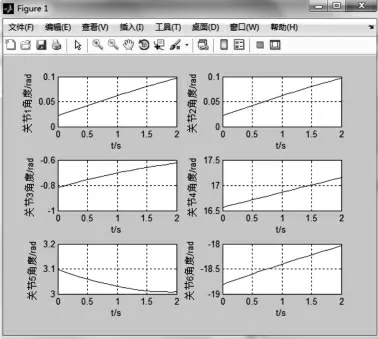
圖8 關節角度變化曲線
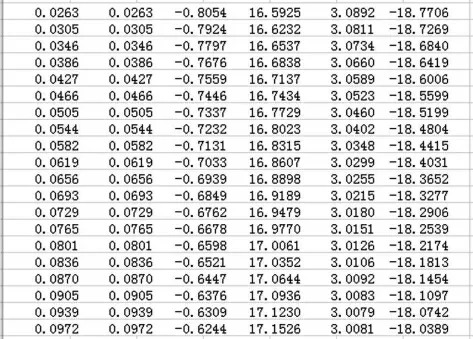
圖9 關節角度數值
3.2 圓弧規劃
設圓心坐標為(764,1415,-230),半徑R=200 mm,使用機器人工具箱進行圓弧擬合,具體程序如圖10所示,擬合出的圓弧如圖11所示。

圖10 圓弧擬合程序
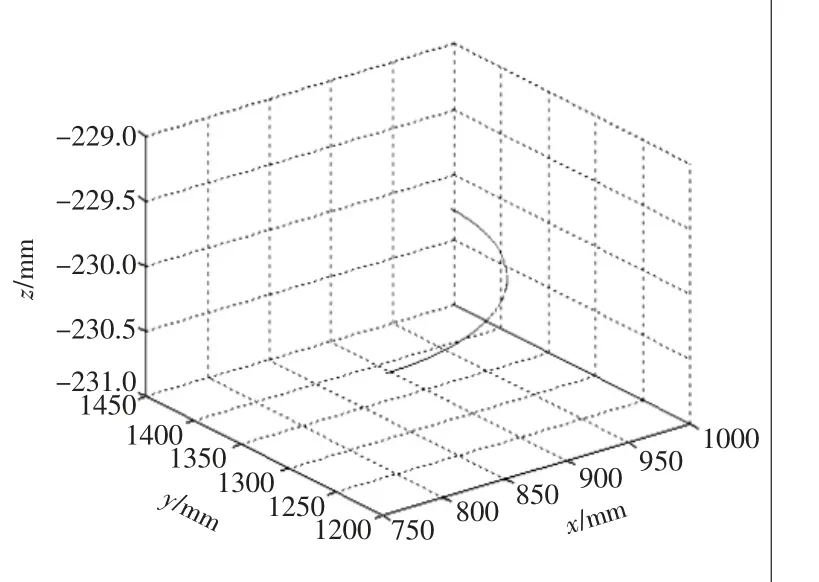
圖11 擬合空間圓弧
通過調用圖12程序可觀察在擬合過程中各個關節角的變化情況(如圖13)。
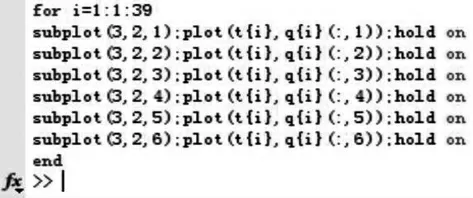
圖12 求各個關節角度的MATLAB程序
通過觀察圖13不難發現其各個關節的角度變化都是光滑連續的,輸入函數語句q{i}可得其各個關節角的具體變化數值,部分關節數值如圖14所示。
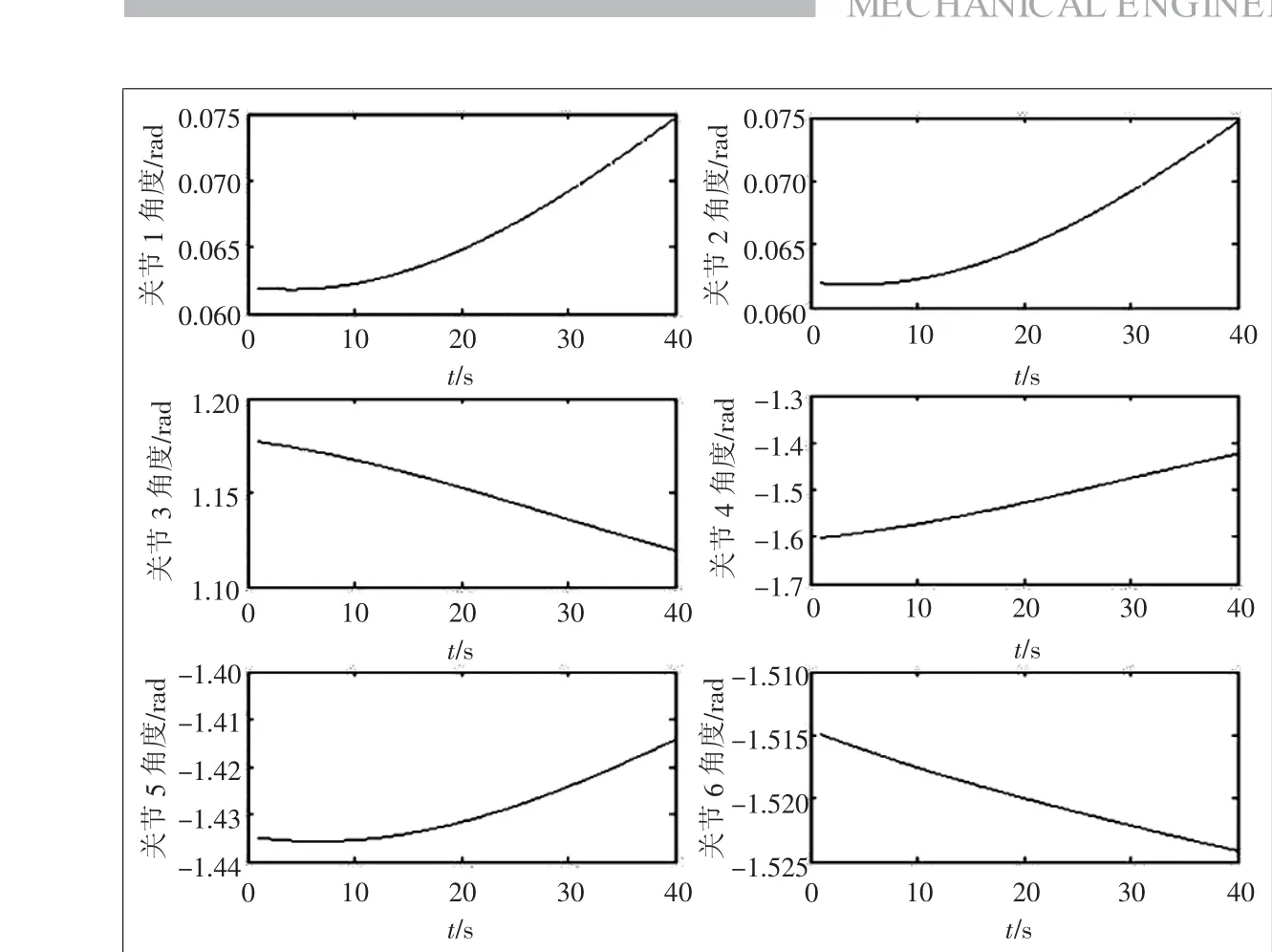
圖13 各個關節角度變化曲線

圖14 具體關節角度數值
4 結論
通過使用Robotics Toolbox 建立了機器人三維模型,并在機器人工作空間內分別對直線和圓弧軌跡進行了軌跡擬合。結果表明,在軌跡擬合過程中工業機器人的各個關節角度的變化是光滑連續的,說明使用工業機器人可以較好地完成壓力容器縱、環焊縫的軌跡打磨,并在擬合過程中求解出各個關節角隨時間變化的數值解,為工業機器人在工作空間內沿著焊縫軌跡運動提供了編程算法與理論基礎。
猜你喜歡
建材發展導向(2021年6期)2021-06-09 05:57:08
裝備制造技術(2021年1期)2021-05-21 07:55:04
金屬加工(熱加工)(2020年12期)2020-02-06 05:59:00
人大建設(2019年12期)2019-05-21 02:55:44
制造技術與機床(2018年12期)2018-12-23 02:40:58
中山大學法律評論(2018年1期)2018-03-30 01:21:00
瞭望東方周刊(2017年42期)2017-12-05 18:49:38
環球時報(2017-03-30)2017-03-30 06:44:45
制造業自動化(2017年2期)2017-03-20 14:26:13
中國衛生(2015年3期)2015-11-19 02:53:32
