基于UG 的自走式大白菜收獲裝置關鍵部件的研究與設計
2021-08-20 00:47:06朱容芳
現代農機 2021年4期
關鍵詞:設計
朱容芳
(廣西大學 機械工程學院,530004,廣西南寧)
隨著種植規模化、集約化,傳統的人工收獲方式已經無法滿足大白菜大面積生產的需要[1]。Kanam M等[2]人研制出了一種大白菜收獲機,主要對大白菜收獲機的拔取裝置和切割裝置進行了研究設計,采用旋轉的圓盤切刀切掉包葉,不利于大白菜的保存。Hachiya M 等[3]人研發一種甘藍收獲機械,通過雙圓盤拔取裝置將甘藍從土壤里拔出后,向后續工作裝置傳輸,先經過割刀進行切根處理,不適用于中小型規模種植的收獲。因此,針對小型農戶、小型農場的白菜收割需求,基于三維建模軟件UG 設計出一種自走式大白菜收獲裝置,以減輕勞動強度,節省人工,對提高丘陵地區的小規模種植的白菜收獲效率具有重要意義。
1 設計要求及性能指標
1.1 設計要求
所設計的大白菜收獲裝置要求針對小田地、丘陵地區的中小型農場、中小型農戶、小型種植基地等,故其體積、質量不能太大,成本不能太高,需要盡量降低成本,以免增加農戶的經濟負擔。所設計的大白菜收獲裝置在技術上需要滿足以下要求:①能夠安全有序地收獲大白菜;②能夠精確切割大白菜并分別計數;③不應造成白菜的大面積損傷;④能夠快速準確地切割下大白菜并進行收集;⑤結構可靠、安全,易于操作與維修。
1.2 性能指標
達到以下要求:切割準確率100%;收獲準確率>99%;收獲速度>45 棵/min。
2 結構與原理
利用三維建模軟件UG 所設計的大白菜收獲裝置結構簡圖如圖1 所示,其原理是:裝置以一定速度前進,單行收獲白菜,壓頂輪1 壓緊白菜頂部,圓盤切刀3 從莖上部直接將白菜從土地里切割下來,脫離了土壤的白菜在撥葉輪的作用下傾倒在水平傳送帶6 上,由機構的兩側傳送帶4 和5 扶正傳輸,而后傳送到后面的收集裝置中,如此循環工作。為了檢測白菜收獲效率,在傳送帶末端添加計數傳感器。
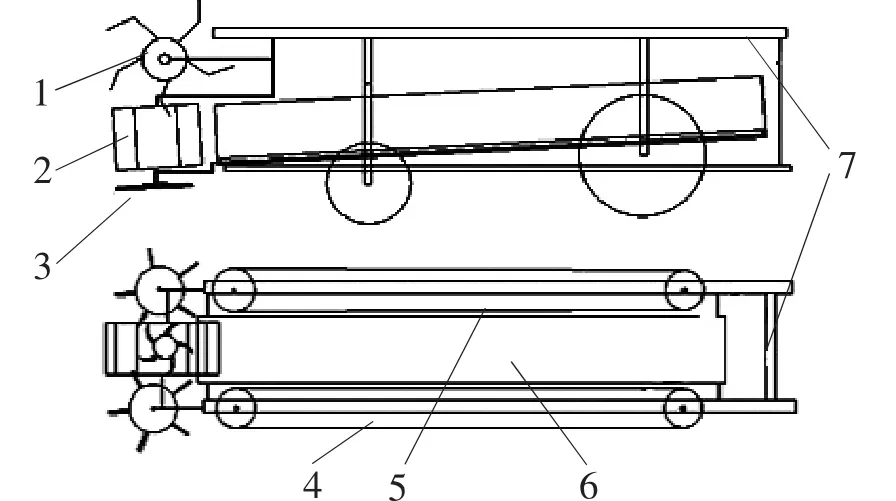
圖1 大白菜收獲裝置結構簡圖
3 關鍵部件的設計
3.1 切割裝置
根據對大白菜特性的研究,本設計采用圓盤回轉式的割刀。圓盤回轉式切刀繞其軸線在水平面內作旋轉運動,割茬較為齊整,同時工作平穩,震動較小。考慮到圓盤切割器的結構組成和功率消耗分布,為了減少損耗,結合本設計技術要求和收獲切割效率,根據裝置行走速度為0.5 m/s,故將切割器轉速設計為n=100 r/min,刀片數量設計為m=5。
(1)刀片結構如圖2 所示。
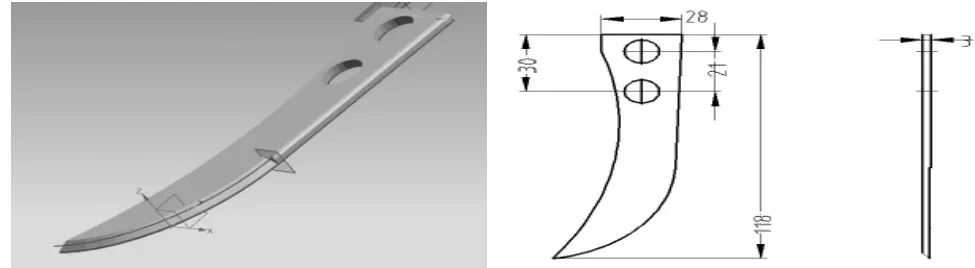
圖2 刀片結構圖
(2)為了滿足設計需求,合理配置刀具,安全安裝刀具,刀盤設計如圖3 所示。
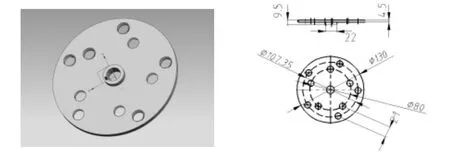
圖3 刀盤結構圖
(3)將5 把刀片用10 個M12 螺栓安裝固定在刀盤上,并配置墊片,如圖4 所示。
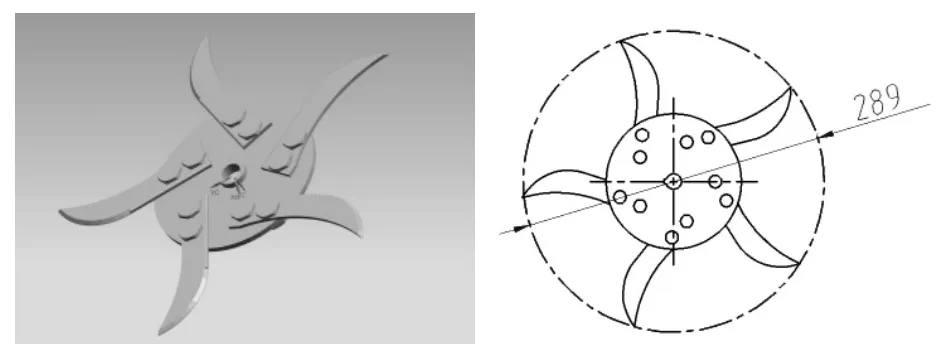
圖4 圓盤和刀片裝配結構圖
3.2 壓頂輪
壓頂輪的作用在于在切割時給予白菜一個壓頂支撐保護作用,并且壓頂輪在旋轉前進的過程中能夠對白菜的向后傳輸運動起到一個輔助作用。壓頂輪位于割刀的正上方,軸線平行于地面,能夠協助割刀切割白菜,其材料選用橡膠,由于橡膠與鋼摩擦系數較大,故每片輪葉上使用兩顆M8 的螺釘將其固定在輪轂上,實現輪葉與輪轂的連接。裝置前進速度0.5 m/s,白菜間隔為420 mm,即切割白菜的速度為1.19 棵/s,即71.4 棵/min,壓頂輪的工作要求是每轉一圈需要壓頂5棵白菜,切割5 棵白菜所需時間為4.2 s,即壓頂輪旋轉一周所需時間4.2 s,即轉速為14.3 r/min。壓頂輪的結構如圖5 所示。
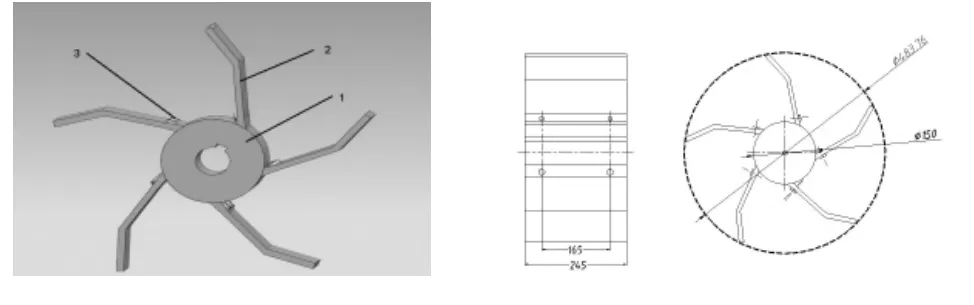
圖5 壓頂輪結構圖
3.3 撥葉輪
撥葉輪的作用在于將切割下的白菜傳送到傳輸裝置中,其結構和材料與壓頂輪相似,在此不作贅述。撥葉輪位于圓盤割臺的兩側,為了達到最好的工作狀態以及不影響割刀的正常工作,撥葉輪的安裝位置應位于割刀上方30 mm 處。根據撥葉輪的結構特征,計算出撥葉輪的速度應與壓頂輪的速度保持一致,轉速均為14.3 r/min,保證白菜均勻受力。撥葉輪的結構如圖6 所示。
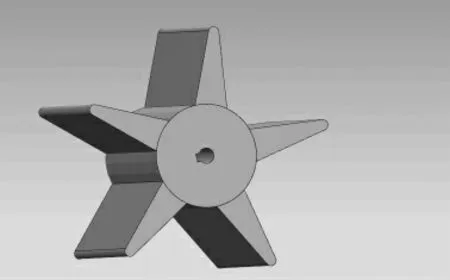
圖6 壓頂輪結構圖
3.4 傳輸裝置
白菜被切割以后,由撥葉輪和壓頂輪共同作用將其向后傳送至傳輸裝置。傳輸裝置主要由兩部分組成。第一部分是水平傳送帶,其處于未工作狀態時平行于地面,采用寬度220 mm 的普通平帶,如圖7 所示;帶輪直徑為63 mm,轉速為303 r/min 。第二部分是位于割刀兩側的傳送帶,為了減少對白菜的損傷以及能夠更快速簡便地傳送白菜至收集機構,將兩側的傳送帶面設計為間隔帶橢圓形凹面,根據白菜的形態特征,凹面橢圓的長軸近似為白菜的高度即500 mm,短軸近似為白菜的直徑即200 mm,凹面深度20 mm,如圖8 所示;兩條皮帶的內側帶面的距離略小于白菜的直徑,以便能夾緊白菜;帶輪直徑為140 mm,轉速為136 r/min。
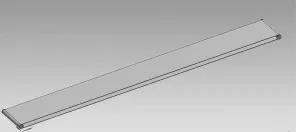
圖7 水平傳送帶

圖8 割刀兩側傳送帶
整個傳輸裝置的工作原理是:當白菜被切割后由撥葉輪和壓頂輪傳送至水平傳送帶端部處時,由于撥葉輪和壓頂輪的持續作用,白菜將傾倒在水平傳送帶上,由于水平傳送帶具有1 m/s 的初速度,兩側帶凹面的傳送帶與水平傳送帶具有相同的速度為1 m/s,所以白菜能夠在傳送帶上快速完成傳輸過程。在傳送帶末端與收集裝置的中間區域連接有計數器,以便檢測白菜的收獲效率。
4 整機裝配
根據前面的研究設計結果,得到了各關鍵部位以及割臺的設計圖,使用三維建模軟件UG 軟件進行虛擬設計,得到的裝配圖如圖9 所示。
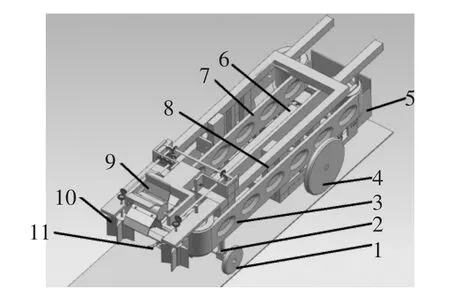
圖9 大白收獲切割裝置裝配圖
為了方便運輸和便于管理,將大白菜收獲機設置為兩個狀態——工作狀態和非工作狀態,兩者的轉換依靠固定在機架上的液壓千斤頂手動操作。處于工作狀態時,前輪行進方向與割刀工作平臺不平行,如圖10 所示;處于非工作狀態時,前輪行進方向與割刀工作平臺平行,如圖11 所示。

圖10 工作狀態下的裝置圖
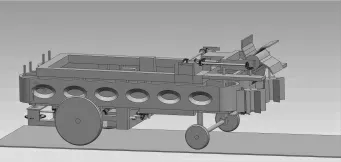
圖11 非工作狀態下的裝置圖
通過壓頂輪、撥葉輪和圓盤割刀的共同作用,將白菜從土地里面切割下來并進行傳送。確定壓頂輪、撥葉輪的轉速為14.3 r/min,整機前進速度為0.5 m/s,割刀轉速為100 r/min,通過計算,切割白菜的速度為1.19棵/s,傳輸速度為1.19 棵/s,滿足設計要求中的效率要求;帶凹面的具有彈性的皮帶,在傳輸過程中既保護了白菜不受損傷,又能夠增加傳輸過程中摩擦力,降低功率,最大限度保持白菜的完整性;計數器能夠為檢測準確性和效率提供數據來源。整個設計滿足技術要求。
5 結語
以白菜收獲為研究對象,根據白菜的收獲效率及損耗要求,確定大白菜收獲裝置的技術指標,據此確定收獲裝置的工作原理和技術方案,利用三維建模軟件UG 設計了自走式大白菜收獲裝置的關鍵部件——切割裝置、壓頂輪,撥葉輪、傳輸裝置的結構、尺寸及工作速度,通過計算,結果表明整個設計滿足技術要求。此設計對針對小型農戶、小型農場的白菜收割機械的研究具有借鑒意義。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
