一種教學用采摘競賽機器人
2021-08-21 19:03:47羅家寧賀泉張思豪史穎剛劉利王轉衛
機電工程技術 2021年12期
羅家寧 賀泉 張思豪 史穎剛 劉利 王轉衛

摘要:針對中國機器人大賽采摘機器人子項目,設計了一種教學用采摘競賽機器人。首先,根據競賽要求,設計教學用采摘機器人的機械系統,確定了四輪獨立驅動的電機布局及差速轉向的輪式結構;設計了四自由度串聯機械臂,二指回轉型機械爪和自動卸載的儲物筐。以 STM32F103ZET6單片機為核心,搭載底盤控制模塊、顏色識別模塊和采摘機械臂模塊,構建了采摘機器人的控制系統。根據比賽要求和流程,編寫了機器人基本運動子程序、顏色識別子程序、機械臂控制子程序以及系統整體流程。并搭建實物進行測試,結果顯示該設計滿足競賽基本要求,能夠為學生參加競賽提供一定的參考。
關鍵詞:教學機器人;機械系統;控制系統;程序設計;視覺識別
中圖分類號:TP242???????????? 文獻標志碼:A??????? 文章編號:1009-9492(2021)12-0131-04
A Picking Competition Robot for Teaching
Luo Jianing ,He Quan ,Zhang Sihao ,Shi Yinggang ※, Liu Li ,Wang Zhuanwei
(College of Mechanical and Electronic Engineering, Northwest A&F University, Xianyang, Shaanxi 712100, China)
Abstract: Aiming at the picking robot sub project of China robot competition, a picking competition robot for teaching was designed. Firstly, according to the competition requirements, the mechanical system of the picking robot for teaching was designed, and the motor layout of four-wheel independent drive and the wheel structure of differential steering were determined. Four degree of freedom series manipulator, two finger rotary mechanical claw and automatic unloading storage basket were designed. Taking STM32F103ZET6 single chip microcomputer as the core, equipped with chassis control module, color recognition module and picking manipulator module, the control system of picking robot was constructed. According to the competition requirements and process, the robot basic motion subroutine, color recognition subroutine, manipulator control? subroutine? and the overall process of the? system were written. The results? show that the? design meets the basic requirements of the competition and can provide some reference for students to participate in the competition.
Key words: teaching robot; mechanical system; control system; program design; visual identity
0 引言
機器人競賽是培養學生創新思維和能力的重要途徑,設計一款面向教學的采摘競賽機器人,可以為各高校學生提供機器人課程系統學習與實訓的機會,從而更好地理解采摘競賽機器人,在實踐中掌握基本專業技能[1]。
果園采摘機器人競賽是中國機器人大賽的子項目,比賽場地如圖1所示。起點區、終止區和儲存區均為矩形區域,可用于儲存收集果實[2]。本競賽場地設有機器人行走引導線,機器人沿引導線從起點區出發,按采摘的難易度,依次經過 A區、B區、和 C區,最后到達終止區,完成自主循跡、語音播報、目標識別、果實采摘、收集和運輸等功能。所要采摘的果實使用仿真模型,其中 A 區模擬基礎設備完備的場景,有6個成熟果實,在收獲地點有提示線;B 區模擬基礎設施不夠齊全或發生故障的場景,有4個成熟果實,2個未成熟果實,其中果實位置不確定,有行走引導線;C區模擬開放的果園,在果樹的6個不同位置隨機分布3個成熟果實與3個未成熟果實,無行走引導線,作業點 C2、C3、C4、 C6有提示線。
分析采摘機器人的功能需求,機器人需要完成的任務有語音播報參賽隊伍信息以及采摘作業點的基本情況、沿導航線行走、識別果實成熟度、采摘并存儲成熟的果實等。因此,本設計中的采摘機器人需要包括底盤、機械臂、機械爪、儲物筐、語音模塊、平面定位系統和視覺識別系統。本文從機械系統、控制系統和子程序設計3個方面對采摘競賽機器人進行搭建。
1 機械系統設計
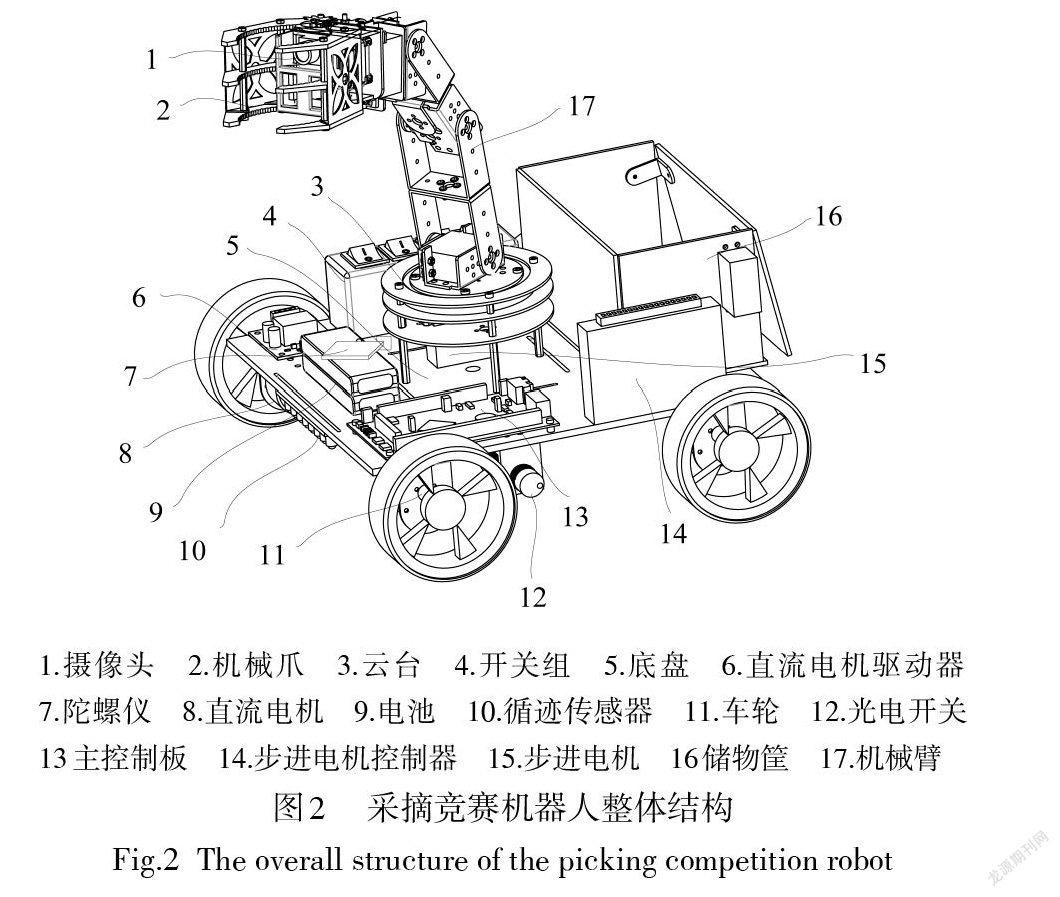
本文設計的采摘競賽機器人整體結構如圖2所示。教學機器人要求開放兼容,易于學習、創新,方便課程與競賽,因此對整體的機械結構、電氣系統、控制算法都采用模塊化設計,保證機械結構牢固連接,硬件模塊易于插拔,性能穩定可靠同時也便于裝卸維護。輪式結構簡單易控,能量利用效率高,因此機器人的移動形式選用輪式結構轉向方式選用差速轉向式[3]。機器人底板為長300 mm、寬290 mm、厚3 mm的鋁板,鋁板下側固定車輪、驅動電機、各種控制元件和傳感器等;上側固定機械臂、機械爪、儲物筐、攝像頭、電機驅動器、鋰電池和開關組等。車輪選用承重能力較好且抓地能力較強的海綿橡膠輪,直流電機采用 PID 調速,可獨立精準地驅動四個主動輪;考慮到小車受力和工作情況,車輪電機選用霍爾編碼器直流減速電機 GM37-520。
機械臂[4]采用四自由度關節型機械臂,臂長分別為110 mm、90 mm、50 mm ,采用 U型、L 型等舵機金屬配件進行連接。為減少旋轉次數且提高導航精度,機械臂底端設置有云臺[5],考慮到機械臂的自重及受力情況,云臺驅動電機選用扭矩和轉動角度都較大的42步進電機;機械臂末端裝有二指回轉型機械爪,機械爪動作時,右側手指由舵機帶動轉動,左側手指通過輪齒嚙合進行傳動;攝像頭裝在機械爪掌心位置;儲物筐采用6片輕質亞克力板制成,用 L 型支架連接,上方保持開口狀態,前側設為檔物板,舵機轉動時檔物板可以抬起,果實從筐中滑出,實現果實自動傾倒;其余控制部件均通過泡棉膠帶黏在底盤空隙處。
2 控制系統設計
采摘競賽機器人的控制系統以 STM32F103ZET6芯片為主控制核心,控制系統如圖3所示。本設計中循跡傳感器采用 SEN1595,通過 AD 轉換與主控器進行通訊,利用循跡預估算法,保證機器人沿引導線行走;采用增量式磁編碼器通過 AD 轉換,記錄車輪轉動圈數和轉動瞬時位置,利用 PID 算法,實現機器人穩定行走;采用電子羅盤,通過 IIC總線通訊,利用平面定位算法,實現采摘機器人慣性導航控制;采用 OpenMV 攝像頭模塊,通過串口通訊,利用閾值分割算法,實現采摘機械人視覺顏色識別。
比賽開始時,按下啟動開關,機器人開始工作。主控制器向語音模塊發送低電平信號,開始播報參賽隊伍信息;播報結束后,機器人從起始區出發,開始沿導航線行走,行走過程中依靠增量式磁編碼器檢測機器人的行走姿態和速度信息,并時刻反饋至主控制器,計算當前角度和速度偏差,對機器人進行調整,實現對機器人的行走姿態檢測;循跡傳感器通過光敏電阻對不同顏色的反射光的強弱進行對比,從而判斷車體和導航線的位置關系,實現機器人的循跡任務;到達采摘位置時,光電開關檢測到植株信息并向主控制器發送低電平信號,機器人停止運動;機械臂開始采摘工作,機械臂的控制采用固定地點預設動作組的方法進行,通過上位機軟件在線編輯舵機動作組,然后把編輯好的動作組下載至舵機控制板中,便可實現脫機運行,最后由主控制器控制動作組的調用,實現果實采摘;機械臂到達指定位置后,機械爪掌心位置的攝像頭開始識別果實信息,視覺模塊[6]采用可編程攝像頭模塊 OpenMV ,其控制核心為 STM32F427,使用 Python編寫尋找色塊、邊緣檢測、模板匹配等核心算法,實現對果實顏色、輪廓的識別,然后將識別結果通過串口發送給主控制器,若為紅色則控制機械爪抓取果實并放入儲物筐,若為綠色則向下一個采摘位置行進,繼續后續的采摘工作;完成所有任務后,機器人到達終止區,播報比賽結束,然后停止工作。
3 程序設計
按照競賽規則,面向教學的采摘機器人控制系統需完成機器人的行走控制、機械臂動作控制和視覺識別3個子程序的流程規劃及程序編寫。
3.1 機器人行走子程序設計
底盤電機選用直流減速電動機 GM37-520,使用 TB6612FNG芯片將控制信號進行功率放大,以實現電機調速和換向功能。為優化電機轉速控制效果,降低重心偏移或摩擦力差異等造成的速度誤差,基于帶有編碼器反饋的閉環電機系統,采用比例積分微分的 PID 控制算法[7]。本設計選擇位置閉環控制,如圖4所示,通過編碼器脈沖累加,求得電機位置信息,將其與預先設定值進行比較得到控制偏差,控制偏差的比例、積分、微分使其趨于0[8]。
其數學模型為:
式中:KP、KI、KD 分別為比例常數、積分常數、微分常數, EK 表示本次偏差,EK-1表示上一次偏差,SK 表示前 K 次偏差累積和,OUT表示輸出。SL,PL分別為目標值和測量值。
在使用時,定時器1設置為 PWM 輸出模式控制電機轉速,定時器2~5設置為編碼器輸入模式,測量電機位置值,定時器6用于定時采樣,在中斷服務函數中實現位置式 PID 控制,程序控制流程如圖5所示。
經過多次調試,最終確定在面向教學的采摘機器人的實際應用中,KP=60,KI=0.5,KD=0,即可滿足穩定行走要求。
有循跡線時,利用前側兩路循跡傳感器進行導航,如圖6所示。正常行走時,兩個傳感器值均為1,檢測到白色循跡線時變為低電平0,若左側傳感器為0,代表車體右偏,機器人應向左調整,反之亦然。當光電開關檢測到果樹時,將停止信號發送給主控制板,進行制動。
無循跡線時,利用平面定位系統進行導航。慣性導航模塊檢測機器人運動參數,經過數據融合算法、卡爾曼濾波算法,獲得機器人角度姿態;編碼器測量車輪轉動圈數和轉動瞬時位置,利用外部中斷記錄脈沖數,便可結合車輪直徑,推算機器人位置變化。因此,已知車輪直徑及目標點位置坐標,便可實現自主導航移動。
3.2 機械臂動作控制子程序設計
機械臂的控制采用固定地點預設動作組的方法進行。通過上位機軟件在線編輯舵機動作組,使機械臂完成競賽要求的動作;然后將編輯好的動作組下載入舵機控制板中,實現脫機運行;最后通過串口進行舵機控制板與主控制器的通信,進行動作組的調用。
機械臂底端的步進電機通過步進電機驅動器,將電脈沖轉換為角位移,一個脈沖信號驅動步進電機按設定方向轉動一個歩距角。本設計采用共陰極接法,DIR+輸入電機轉向設置信號,PUL+輸入脈沖信號,改變脈沖信號頻率,可調節轉速,預設步數決定轉動角度,流程如圖7所示。
3.3 顏色識別子程序設計
根據比賽規則,采摘機器人需辨別果實成熟度,本設計選擇 OpenMV攝像頭組,采用 LAB 閾值分割法進行顏色識別,在其自帶的基于 Python語言的開發環境中完成編寫程序,視覺識別流程如圖8所示。
系統完成初始化及圖像預處理后,通過 thresholds函數設置目標顏色閾值,利用 find_max函數框選并標記最大目標色塊,將其閾值與目標值進行比較,完成判斷,
將判斷結果通過串口發送給 STM32主控板,以便其控制后續采摘動作。
3.4 整體流程設計
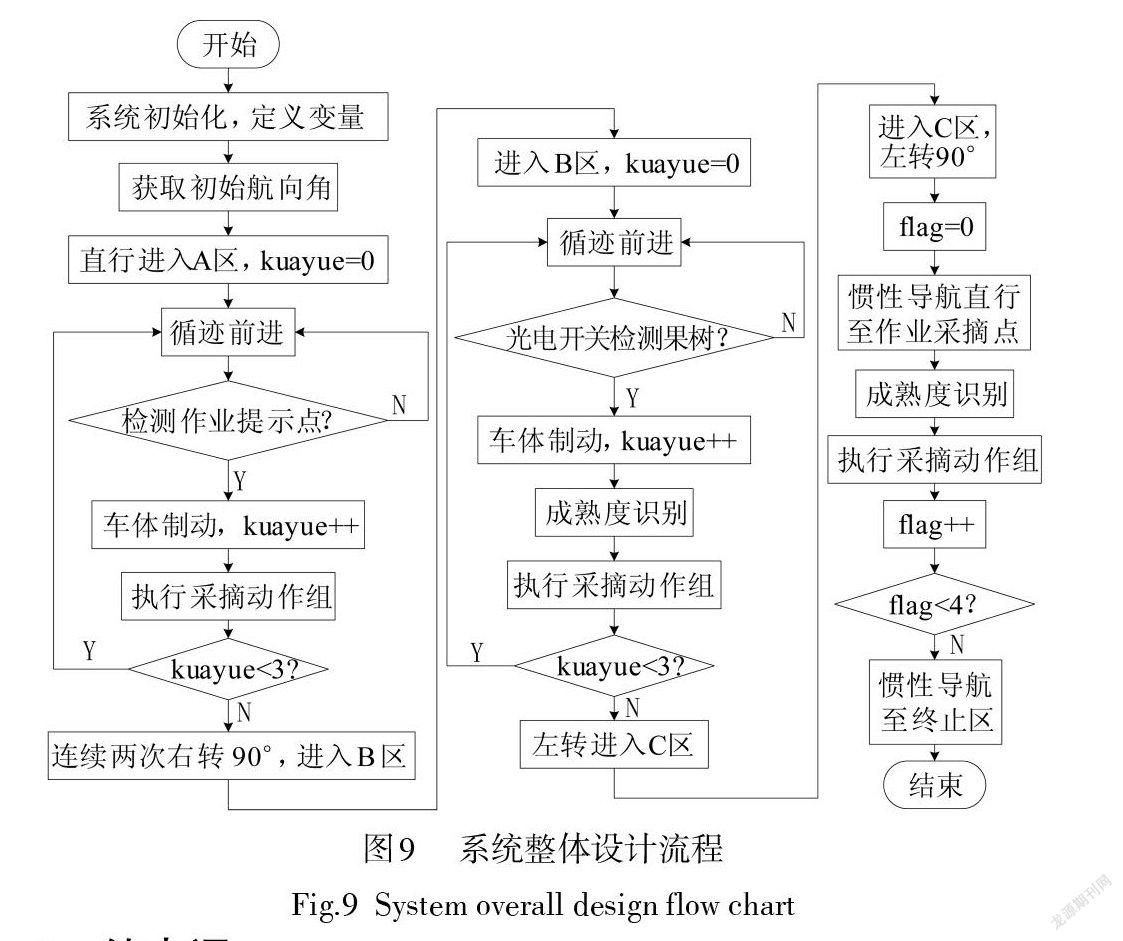
A 、B 、C三個區難度依次增加:A 區利用灰度傳感器循線直行,根據作業提示線確定停車位置,調試動作組進行采摘;B 區循線直行,利用光電開關判斷果樹位置,識別果實成熟度,完成采摘;C區完成自主導航,利用融合編碼器與陀螺儀的定位系統,達到目標作業位置,完成識別與采摘。系統的整體設計流程如圖9所示。
4 結束語
根據競賽要求,本文以 STM32單片機為主控制核心,設計了采摘機器人的機械結構和控制系統以及機器人行走程序、機械臂動作控制程序和視覺識別3個子程序的流程規劃及程序編寫。采用語音模塊,實現機器人播報比賽隊伍及果實情況信息;采用OpenMV視覺識別模塊,實現機器人對果實成熟度的確認;采用循跡傳感器、平面定位系統及慣性導航模塊,實現機器人準確抵達采摘位置。通過多次試驗,本設計中的機器人可順利完成智能語音播報、自主循跡導航、采摘和存儲果實、檢測果實成熟度等功能。基于本科生參與度較高的果園采摘機器人競賽,通過參考國內外多種教學機器人及競賽機器人研究現狀,完成了面向教學的采摘機器人的設計,機械系統搭建簡便,對本科生參加競賽具有一定的參考價值。在對各個環節的調試和整體運行過程中能極大的提高學生綜合素質。
參考文獻:
[1]皆彥吉.果蔬采摘機器人的研究現狀、問題及對策[J].2018,45(9):1.
[2]劉家春, 劉利.基于競賽的醫療服務機器人控制系統設計[J].2018,32(2):6-11.
[3]徐濤, 申焱華.分布驅動輪式車輛差動轉向動力學特性研究[J].2018,40(7):812-819.
[4]孫龍,李長勇.六自由度機械臂的運動學分析和軌跡規劃研究[J].2021,42(3):41-44.
[5] Wang G, Yu Y. Design of End-effector for Tomato Robotic Har? vesting[J].2016,49(6):190-193.
[6]程祥云, 宋欣.果蔬采摘機器人視覺系統研究綜述[J].2019,60(3):409-493.
[7]高妍,李昕宇.果園噴藥競賽機器人設計[J].2019, 16(16):55-57.
[8]劉旭東.PID 控制策略在輪式機器人電子競賽中的應用[J].2014(9):131-132.
第一作者簡介:羅家寧(2000-),女,山西忻州人,大學本科,研究領域為專用機械與設備、農業機械化。
※通訊作者簡介:史穎剛(1976-),男,山西隰縣人,副教授,研究領域為機器人技術、農業電氣化。?? (編輯:刁少華)
