半潛式平臺壓載控制系統設計
2021-08-21 20:54:58劉承志徐亞玲石麗杰周迎春薛吉宏
機電工程技術 2021年12期
劉承志 徐亞玲 石麗杰 周迎春 薛吉宏
摘要:壓載控制系統是半潛式平臺的一個重要組成部分,通過控制和監測半潛式平臺在裝載和卸載過程中壓載水量的變化,進而保證半潛式平臺的穩性,對于保障平臺的安全性和提高調載工作效率方面具有重要的作用。介紹了一種以WinCC 組態軟件和PLC 為核心控制器的壓載控制系統,集數據采集、數據處理、設備操作和上位機界面監測于一體,通過上位機與下位機的信號傳輸,實現閥門的自動控制。相比于傳統的人工操作閥門的方法,壓載控制系統的應用可以大節省人力以及時間成本,提高壓載效率。通過相關調載試驗表明,下位機程序運行穩定,上位機呈現的畫面直觀明了,具有良好的人機交互性。
關鍵詞:半潛式平臺;壓載控制系統;WinCC 組態軟件;PLC;人機交互
中圖分類號:TP273文獻標志碼:A文章編號:1009-9492(2021)12-0231-04
Research on Ballast Control System of Semi-submersible Platform
Liu Chengzhi,Xu Yaling,Shi Lijie,Zhou Yingchun,Xue Jihong
( Offshore Oil Engineering Co. ,Ltd. ,Tianjin 300461,China )
Abstract:The ballast control system is an important part of the semi-submersible platform. By controlling and monitoring the change of the ballast water volume of the semi-submersible platform during the loading and unloading process,the stability of the semi-submersible platform can be ensured,which is important for ensuring the safety of the platform. It plays an important role in improving performance and improving theefficiency of load adjustment. A ballast control system with WinCC configuration software and PLC as the core controller was introduced,which integrated dataacquisition,data processing,equipmentoperationandhostcomputerinterfacemonitoring. Throughthesignaltransmissionbetween the host computer and the lower computer,realized the automatic control of the valve. Compared with the traditional method of manuallyoperating the valve,the application of the ballast control system could greatly save manpower and time cost,and improve the ballast efficiency. The related load adjustment test shows that the program of the lower computer runs stably,the picture presented by the upper computer is intuitive and clear,and has good human-computer interaction.
Key words:semi-submersible platform;ballast control system;WinCC configuration software;PLC;human-computer interaction
0 引言
隨著我國海洋石油事業的不斷發展,深海域的石油開發已逐步成為我國現階段的重點研究方向,同時半潛式的采油平臺也逐步在各類采油平臺中脫穎而出[1],半潛式平臺是通過調節其壓載艙中壓載水量的變化進而控制整個平臺的上浮與下沉。在早期的壓載工況下,平臺的穩定狀態大都由操作人員的現場經驗獲得。為了完成配載,需控制壓載水艙的壓載量,這個過程不僅需要大量的人力和時間成本,工作效率低,還無法保證裝載或卸載貨物的安全性,并未實現壓排載的自動控制[2]。為解決這些問題,需要設計一種控制和監測系統,降低人工成本,提高壓排載操作效率。
王嘉宇等[3]依據壓載水調撥智能控制算法,對特定船型在縱傾和橫傾狀態下的穩性進行了分析,并設計了壓載水自動控制系統,對傳統的壓載水控制方式實現了改進。Manzi 等[4]以Pridedo Rio 號石油鉆井平臺為例,在原有壓載系統的基礎上設計了具有人機交互接口的壓載系統,提高壓載效率。
國內外學者針對已有的船舶和海上平臺的壓載系統設計進行了深入研究,本文研究的半潛式平臺具有壓載艙數量多,閥門數量多的特點,同時其還要經歷多種復雜工況,為保證其穩性,需要對半潛式平臺進行精準控制和實時監控。因此介紹了一種以WinCC 組態軟件和PLC 為核心控制器的壓載控制系統,系統的檢測對象包括半潛式平臺的壓載艙液位、平臺吃水、壓載泵進出口壓力等,通過使用PLC 控制器控制壓載艙的閥門開閉、排載水泵的啟停等。上位機監測界面的開發由WinCC 組態軟件完成,主要包括顯示系統的控制界面、生成歷史數據報表等。上位機與下位機相結合,用戶可以實時監測調載過程中半潛式平臺的狀態以及設備的運行情況,并根據不同的狀況做出相應的控制。
1 壓載控制系統概述
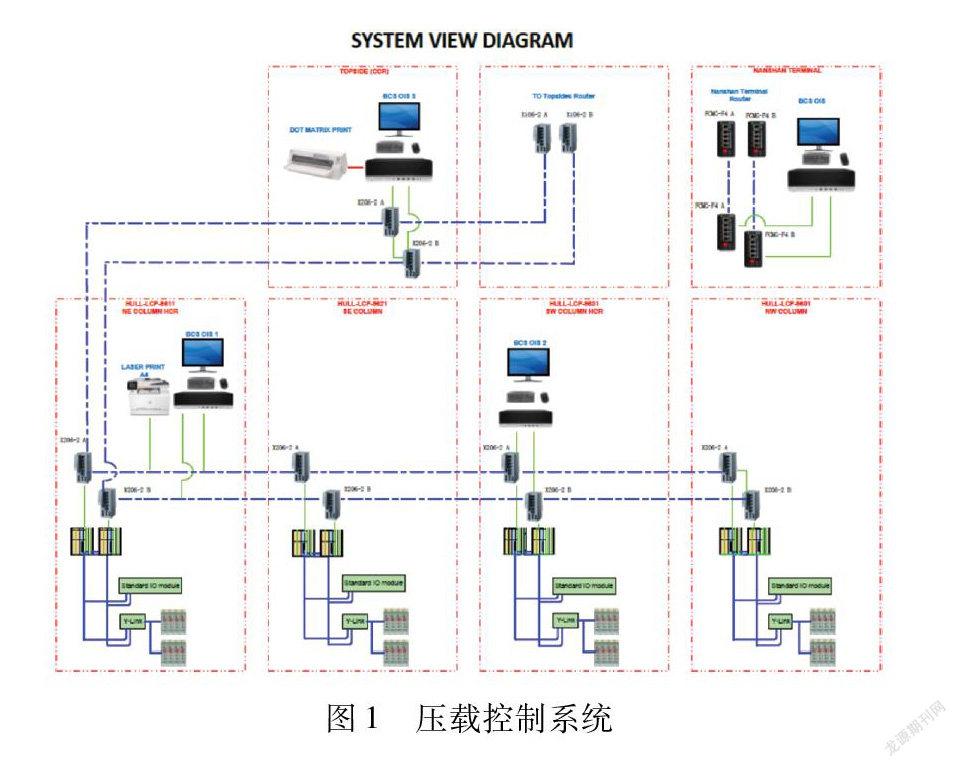
本文介紹的半潛式生產平臺分為上部模塊和船體兩大部分,壓載控制系統的相關設備主要位于船體,船體共有4個立柱,每個立柱的C 層應急控制間均設置有PLC 控制盤柜,4個立柱之間的控制盤柜通過網線進行通信;壓載控制系統位于船體的操作站共有兩臺,分別設置于船體的SW 立柱和NE 立柱,每臺操作站均可以控制和監測整個船體的壓排載狀態;在上部模塊的中控室也設有一臺壓載控制系統操作站,通過串口通信,用戶也可以在上部模塊的中控室中進行相應的控制和監測。壓載控制系統如圖1所示。
2 壓載控制系統硬件設計
2. 1 壓載控制系統整體結構
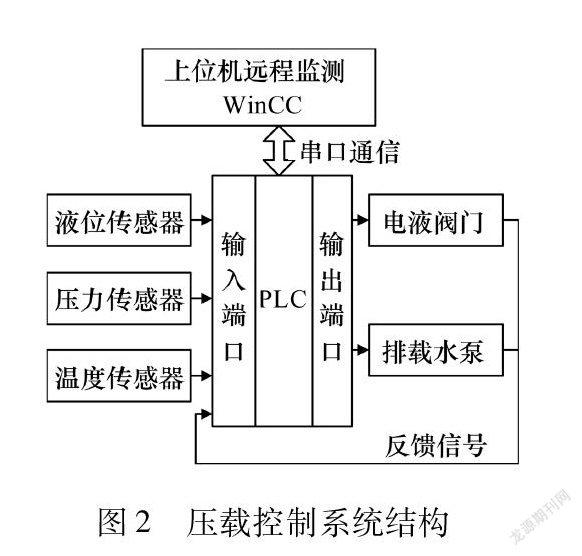
整個壓載控制系統應由數據采集模塊、數據處理模塊、遠程控制模塊和遠程監測模塊等組成。壓載控制系統結構如圖2所示。
壓載控制系統中數據采集模塊由液位傳感器和壓力傳感器對系統中壓載艙液位、各立柱吃水液位、管路壓力、液壓動力系統溫度等數據進行采集;數據處理模塊,即PLC,用于對傳感器采集到的信號進行運算處理,根據不同的輸入數據輸出相應的信號顯示于上位機中,并對遠程控制模塊,即電液閥門和排載水泵,發出控制指令,相應的電液閥門和排載水泵完成指定的動作;遠程監測模塊即WinCC 上位機組態軟件,對整個壓載控制系統進行遠程動態監控。
2. 2 液位測深系統
整個半潛式平臺的控制系統需實時監測各個艙室的液位,如凝析油艙、污油艙、柴油艙、淡水艙、壓載艙等,這些數據對于半潛式平臺的穩態控制至關重要。在整個半潛式平臺的壓載控制系統中,液位測深系統起著監測和報警的作用。液位測深系統包括液位傳感器以及監測軟件等,位于壓載艙中的液位傳感器采集到的數據經過PLC 控制器進行處理以后,顯示于上位機界面中。當液位傳感器測得的數據低于或高于系統原有的設定值時,報警信號會自動輸出,系統發出警報及時提醒現場的工作人員處理相應情況[5],保障了半潛式平臺的安全性。半潛式平臺的液位測深系統的監測界面如圖3所示。
2. 3 閥門遙控系統
相比于傳統的依靠人力手動控制閥門開閉的方式,閥門遙控系統對于節約人力成本、提高工作的安全性起著非常重要的作用[6]。在壓載控制系統中,閥門遙控系統主要用于監測半潛式平臺壓排載系統管路上電液閥門的狀態,接收壓載控制系統的調載指令,控制電液閥門的開閉以及排載水泵的啟停。本文介紹的半潛式平臺的閥門遙控系統由電液閥門、遙控系統和應急閥塊等組成。當需要進行調載作業時,首先明確壓載艙的位置和壓載水量,由壓載控制系統的操作臺控制相應閥門的開啟和關閉,同時在操作界面前監測各個閥門的狀態和壓載艙內水的實時液位,當調載作業完成時,及時關閉相應閥門。半潛式平臺的閥門遙控系統的控制及監測界面如圖4所示。該系統有效解決了遠距離操作閥門工作量大或某些場所操作人員不能隨時進入操作閥門的情況。
3 壓載控制系統軟件設計
半潛式平臺壓載控制系統的軟件設計主要分為下位機PLC 軟件設計和上位機WinCC 組態軟件設計。壓載控制系統軟件結構如圖5所示。PLC 控制軟件[7]主要實現數據采集、數據處理、遠程控制等功能,其中數據采集主要包括壓載艙液位、各立柱吃水、排載系統管路壓力等參數,數據處理主要包括信號轉換、數據存儲、數據顯示等,遠程控制主要包括電液閥門的開閉、排載水泵的啟停等。上位機WinCC 組態軟件[8]的主要功能是實現壓載艙液位、各立柱吃水、排載水泵狀態、閥門開關狀態以及系統管路壓力和溫度等參數在上位機界面中實時顯示,針對系統中的故障及時發出警報,并生成報表進行記錄。
3. 1PLC 軟件設計
壓載控制系統的PLC 軟件設計采用STEP7軟件[9]編寫系統功能塊圖表示控制邏輯,采用多線程的方法來進行模塊化編程,即由主程序調用多個子程序同時實現閥門的開閉、排載水泵的啟停,并在監測的同時進行信號處理。PLC 軟件設計流程如圖6所示。
進入到程序以后,首先完成系統初始化操作,對整個系統的初始值和參數進行相應的設置,然后對整個壓載控制系統進行檢查[10],包括硬件和軟件,硬件主要有排載水泵、各傳感器、閥門的狀態,軟件包括各立柱間 PLC 通信是否正常,上位機界面是否能正確顯示各設備的狀態。若系統通信正常,則按流程進行下一步操作,若通信發生錯誤,則需要立刻中斷程序進行故障檢查。當上位機界面處于正常狀態時,傳感器開始對各壓載艙液位、各立柱吃水和系統管路壓力和溫度進行實時采集,采集到的信號進入PLC 的相應模塊, PLC 調用相應的子程序,實現對排載水泵、電液閥門的遠程控制。同時上位機端對采集到的液位、壓力、溫度以及設備執行情況實時進行顯示。
3. 2 上位機界面設計
半潛式平臺的系統非常龐大,操作人員無法在現場同時監測到多個子系統的狀態,因此將現場的設備形象地顯示在中控的監測畫面中是非常必要的。上位機界面的設計主要是便于操作人員在中控室可以實時查看到各個設備的實時參數,方便操作人員及時做出判斷是否需要進行調載作業,若需進行調載作業,則操作人員通過控制上位機發出指令信息,指令信號傳到下位機PLC 控制器,進而對整個壓排載系統進行圖7上位機軟件系統結構控制。上位機軟件系統功能如圖7所示。
WinCC 是一種模塊化的自動化組件,具有很好的開放性和穩定性[11]。基于WinCC 組態軟件設計的上位機監測系統可以實現的功能有:全面監測系統運行狀態,上位機界面實時監測各壓載艙的液位、各立柱吃水液位以及系統管路壓力或溫度等信息,并實時顯示排載水泵和電液閥門的運行狀態;具備良好的人機交互界面,操作人員可以在中控室實時監測系統狀態并發出控制指令進行遠程遙控,控制設備的運行;數據記錄,上位機軟件會將實時的液位、壓力等數據進行存儲,便于日后查看。
4 海上工況調載
該半潛式生產平臺正常工況下的吃水為35~40 m,圖8所示為平臺上裝載計算機在平臺壓載到35 m 時計算得出的數據,由圖可以看出,平臺在壓載到35 m的位置時已經基本滿艙,所以實際上平臺只要壓載到35 m 左右時即可達到正常海上生產工況。
在進行壓載操作時,進入壓載控制系統的閥門遙控界面,打開相應的閥門即可控制海水進入壓載艙。本文中以NW9艙的壓載操作為例進行介紹,如圖9所示。進行NW9壓載艙進水操作時,需依次打開閥門XV-96010、XV-96013、XV-96014、XV-96006、 XV-96012、XV-96015,
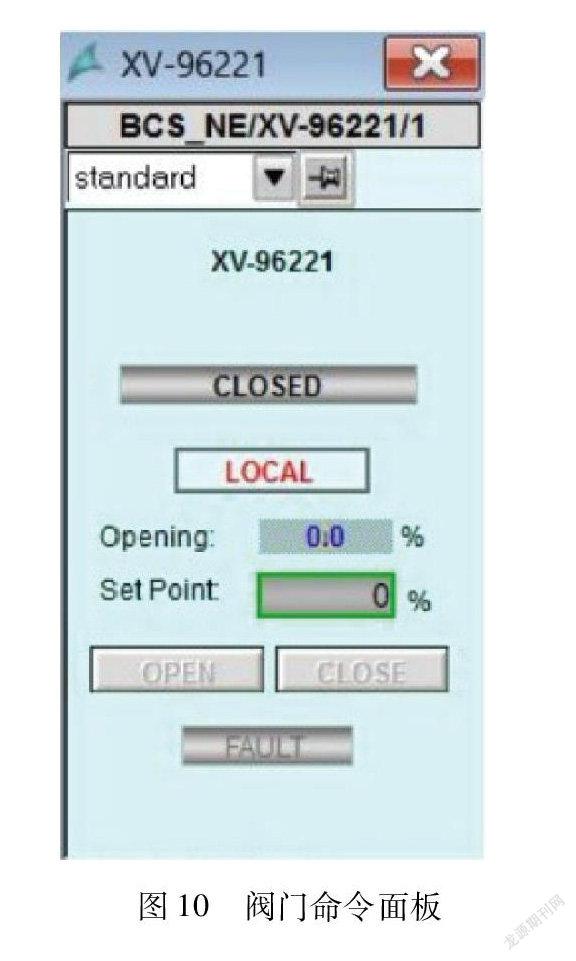
在壓載控制系統中找出相應的閥門打開即可。點擊相應的閥門在界面中會彈出如圖10所示的命令面板,點擊“OPENED”即完成閥門的開操作。需要注意的是,由于壓載艙數量多,進行壓載操作時,需要對側反復壓載,不能單側壓載,避免造成平臺傾斜嚴重,這就需要操作人員在監測界面時刻進行監測,直至各立柱吃水一致。
通過海上壓載試驗,可以得出該半潛式平臺的系統穩定,能很好地控制泵及閥門地動作,同時上位機監測界面清晰,采集到的數據與現場數據在允許誤差的范圍內,具有很好的人機交互性。
5 結束語
本文研究的半潛式平臺的壓載控制系統能夠實現對各壓載艙的液位、各立柱吃水液位等數據的實時采集,采集到的信號傳輸到PLC 控制器進行處理用以對系統的排載水泵和電液閥門的控制。基于WinCC 組態軟件設計的上位機監測界面具有良好的人機交互界面,除了能夠實時監測系統的運行狀態外,通過發送控制指令到PLC 控制進而控制相關設備的運行。該壓載控制系統集自動控制與監測于一體,具有良好的穩定性,大節約了人力成本,提高了整個平臺的自動化水平。
參考文獻:
[1]冷阿偉. 半潛式鉆井平臺新型壓載系統[J]. 中國造船,2009,50( A11):96-101.
[2]潘偉,謝新連,包甜,等. 全回轉起重船作業壓載水調節優化研究[J]. 哈爾濱工程大學報,2019,40(1):193-199.
[3]王嘉宇,王永順,夏大勇. 基于MFC 的船舶壓載水調撥自動控制系統研究[J]. 電腦知識與技術,2014(26):6236-6237.
[4] Manzi M,Soltani B,Guerlain S,et al. Designing a ballast control system operator interface [ C ]//Systems & Information Engineering Design Symposium,IEEE,2005:242-248.
[5]朱兵,白殿芝. 50000 DWT 半潛船自動化監控系統簡介[J]. 船舶設計通訊,2010(增刊):51-54.
[6]包國治,王之民,陳寧,等. 基于Labview 和PLC 的船舶壓載水控制系統[J]. 艦船科學技術,2015,37(3):59-64.
[7]陳雷,李含蘋. 超大型起重船壓載調載系統研究設計[J]. 船舶,2010(1):40-44.
[8]姜健宇. 全回轉起重船泵壓載系統壓載水動態調撥優化及試驗研究[D]. 大連:大連海事大學,2019.
[9]秦軍超. “藍鯨”號起重船調載仿真技術研究[D]. 濟南:山東交通學院,2019.
[10]陳進,施海濤,李橋. 基于PLC 的船舶壓載艙監控系統設計[ J ]. 自動化儀表,2017(3):30-32.
[11]李瑋. 船舶壓載監控系統的設計與應用[J]. 艦船工程研究,2006(4):37-39.
第一作者簡介:劉承志(1986-),男,大學本科,工程師,研究領域為電氣儀表自動化。 (編輯:王智圣)
