基于混合網絡拓撲架構的船舶智能集成平臺網絡架構研究
2021-08-23 07:14:58孫劍峰
科學技術創新 2021年23期
陳 力 孫劍峰
(上海船用柴油機研究所,上海 201108)
近年來,船舶智能化快速發展。在船端,現有最典型的對數據進行采集的系統綜合船橋系統(IBS),該系統采用的是令牌環形局域網,將有關導航、駕控、避碰和監視等傳感信息進行融合,并從人機工程的角度進行集成,以提高系統的自動化程度。[1]在這種傳統的數據采集方式中,平臺各系統設備之間采用點對點的方式進行通訊,耦合大,可擴展性不強,而且作為數據源的各系統之間缺乏聯系,數據封閉無法共享,難以建立統一的數據平臺。
中國船級社提出的《智能船舶規范》中,智能集成平臺作為規范中規定的智能船舶七個重要組成部分之一,能夠集成智能航行、智能船體、智能機艙、智能能效管理以及智能貨物管理等系統的數據,可實現數據的采集和統一存儲,被整合的數據可有效解決數據孤島的問題,為智能船舶的發展提供數據基礎。其總體結構分為七大部分:數據采集、數據存儲、數據整合、信息應用、信息展現、標準規范體系、信息安全體系。[2]
1 傳統船舶信息平臺網絡
目前,船舶系統普遍采用的是控制層、信息層分離的雙網結構,由于控制層對響應時間、同步時間要求較高,普遍采用現場CAN 總線,而信息層對響應時間、同步時間要求不高,普遍采用兼容性更好的以太網。
CAN 協議本身在OSI 七層協議中只包含物理層和鏈路層,這使協議本身具備較強的靈活性,但是CAN 總線的兩層協議自身也存在一些瓶頸:
(1)物理層阻抗匹配設計復雜;
(2)鏈路層仲裁機制的局限;
(3)鏈路層位定時要求嚴格;
(4)鏈路層傳輸速率較低。
針對傳統動力推進與信息平臺網絡的不足,本文結合智能船舶規范的要求,提出了一種基于混合網絡拓撲架構的智能集成平臺網絡架構,其中,控制層采用基于分布式網絡拓撲架構的EPA 實時工業以太網絡,信息層采用基于星型網絡拓撲架構的光纖以太網,通過軟硬件的模塊化、結構化和服務化,解決了各分系統獨立運行、互操作困難、資源無法共享等問題,提高船舶的智能化和自動化,最終達到跨平臺、跨領域的協同作戰能力。
2 船舶智能集成平臺網絡協議
本文控制層采用的是EPA 實時工業以太網,EPA 是基于UDP/IP 協議通信調度策略的確定性,以及以太網高效、穩定、標準的特點,構建一種適應現場設備實時工作狀態的全新標準。目前,國內浙大中控等公司已經開發出了基于EPA 的多種產品,包括基于EPA 的執行器、變送器、遠程分散控制站、數據采集器、現場控制器、無紙記錄儀等。[3]基于EPA 的分布式網絡控制系統在工業化生產中已有實際運用案例。
參考OSI 通信模型,EPA 通信模包含了物理層、數據鏈路層、網絡層、傳輸層和應用層,其模型如圖1 所示。
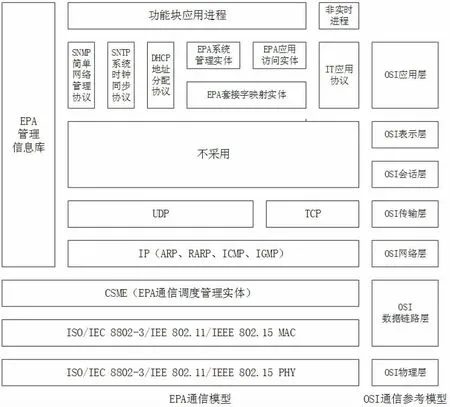
圖1 EPA 通信模型
其特點在于,通過在數據鏈路層上添加了一個EPA CSME(EPA 通信調度管理實體),采用分時調度與優先級調度相結合的方式控制EPA 報文的發送;在應用層添加了EPA 系統管理實體(作為EPA 管理設備)、EPA 應用訪問實體(作為EPA 應用訪問服務)和EPA 應用套接字映射實體(作為系統管理實體、應用訪問實體與UDP/IP 之間的映射)。EPA 管理信息庫則包含了通信調度管理實體、系統管理實體和應用訪問實體操作所需的信息。除此之外,它還在應用層中增添了一個用戶層,包括EPA 功能塊應用進程和其他非實時應用進程兩部分。[4]
3 船舶智能集成平臺網絡架構
3.1 控制層-分布式網絡拓撲架構
控制層打破以往各系統獨自實現數據采集與控制的方式,基于分布式網絡拓撲架構,采用通用化統一化的控制單元模塊對船舶智能集成平臺各艙室進行數據采集與控制。其網絡架構如圖2 所示。

圖2 底層控制層結構圖
控制層采用分布式的采集控制方式,每個艙室配置兩個控制單元,兩者之間互為冗余,通過艙室內冗余配置的網關接到雙冗余光纖以太網,實現底層控制層與上層信息層的互聯。
3.2 信息層-星型網絡拓撲架構
信息層是對數據信息進行傳輸與服務的部分,是以雙冗余光纖以太網的骨架,是構成船舶智能集成平臺網絡的主要組成部分。各艙室經控制單元匯聚控制層信息,經網關、交換機傳輸到服務器進行處理與儲存。其網絡架構如圖3 所示。
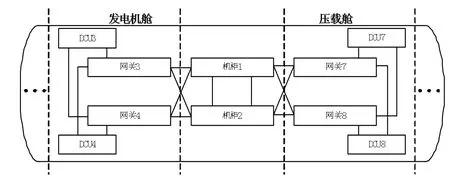
圖3 信息層結構圖
系統信息傳輸層采用星型網絡拓撲結構,各個層面采用冗余鏈路或設備備份,充分考慮了鏈路中斷、設備故障等可能性的意外情況,有效提高網絡的可靠性。
基于上,本文提出一種基于混合式網絡拓撲架構的船舶智能集成平臺網絡,其基本結構如圖4 所示。

圖4 智能集成平臺硬件公共服務架構
其中,在控制層某些特殊位置,傳統傳感器布線難度大、功耗高、數據采集處理成本高,加裝無線傳感網絡設備,比較成熟的像WIA-PA 網絡,可以提供無線傳感器(無線轉速采集傳感器、無線壓力采集傳感器、無線PT100 溫度傳感器、無線PT1000溫度傳感器、無線熱電偶溫度傳感器)、無線適配器(無線模擬量輸入適配器、無線模擬量輸出適配器、無線模擬量輸入輸出適配器)和無線網關,這樣可以增強平臺感知能力,提高船舶的智能性。
4 結論
本文提出的基于混合式網絡拓撲架構的智能集成平臺網絡架構,是智能船舶發展的一個重要方向,下層采控層面劃分為實時域可以直接通過實時網交互數據,上層信息層劃分為非實時域交互非實時的數據,并通過網關隔離實時域與非實時域,使全艦網絡扁平化的同時,使得各個分系統之間的數據進行了最大限度的共享,提高船舶的智能化和自動化,最終達到跨平臺、跨領域的協同作戰能力。
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
航海(2005年4期)2005-04-29 00:00:00