工業廢水處理的模糊控制器設計與仿真
2021-08-23 07:14:58李炫南
科學技術創新 2021年23期
關鍵詞:規則
李炫南
(中國電子科技集團公司第二十研究所 軟件產品部,陜西 西安 710000)
1 工業廢水pH 值中和處理控制策略
工業廢水處理的主要方法是,控制堿液或酸液輸入的閥門流量,使廢液進行充分的中和反應,通過檢測廢水的PH 值,使其不斷趨于中和點,最后在進行有害物質分解,達到廢水排放標準。
廢水處理的化學反應過程是一個存在嚴重非線性的動態過程,難以建立精確的數學模型。常規PID 控制控制簡單、精確度高。模糊控制實時性好,魯棒性強。這兩者結合用于工業廢水處理,可以獲得更好的控制性能。
2 模糊PID 控制器設計
模糊PID 控制是基于常規PID 控制算法與模糊邏輯推理相結合的控制方法,其控制結構圖如圖1 所示。圖中模糊控制器部分采用了雙輸入三輸出的二維模糊控制器,輸入變量為偏差e 和偏差變化ec,輸出變量為KP、KI、KD。
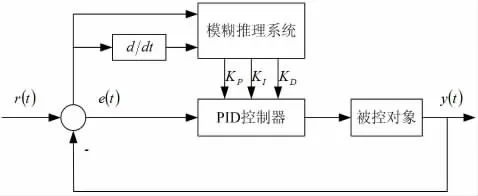
圖1 模糊PID 控制結構圖
模糊PID 控制器自整定控制方案流程圖如圖2 所示。需要經過輸入模糊化、建立模糊控制規則、模糊推理、反模糊化等步驟。
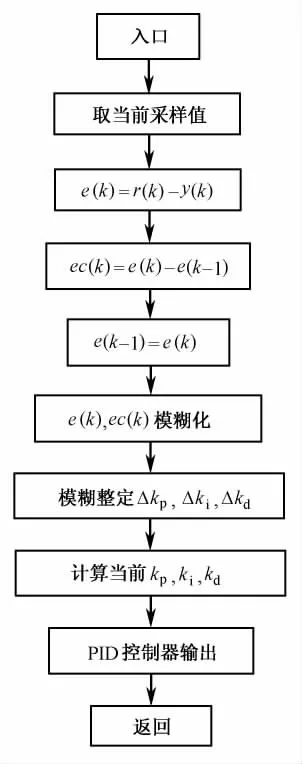
圖2 PID 參數校正流程圖
2.1 輸入模糊化
系統偏差e 和偏差變化ec 變化范圍定義為模糊集上的論域。

輸入變量e、ec 采用三角形隸屬度函數如圖3-4。

圖3 e 的隸屬函數圖
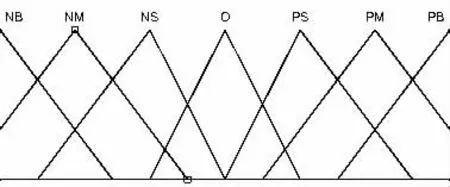
圖4 ec 的隸屬函數圖
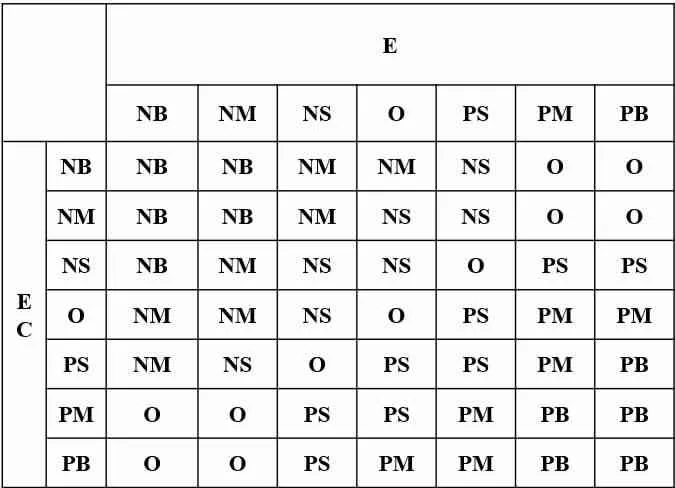
表2 ΔKi 模糊控制規則表
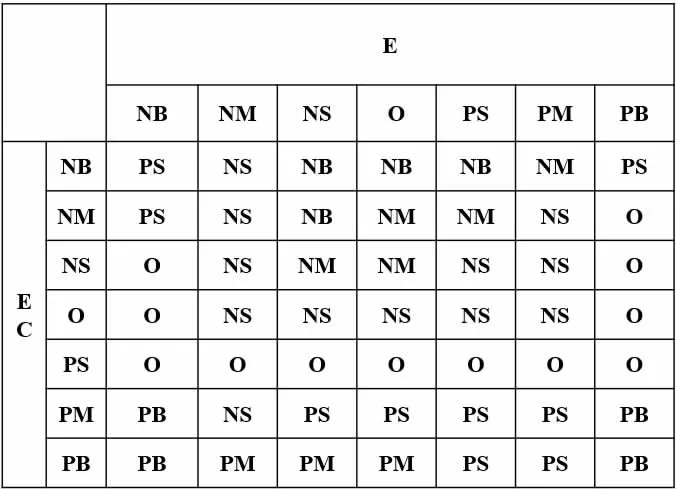
表3 ΔKd 模糊控制規則表
2.2 模糊控制規則
模糊控制設計的核心是總結工程設計人員的技術知識和實際操作經驗,建立合適的模糊規則表,得到針對KP,KI,KD三個參數分別整定的模糊控制表,見表1-3。
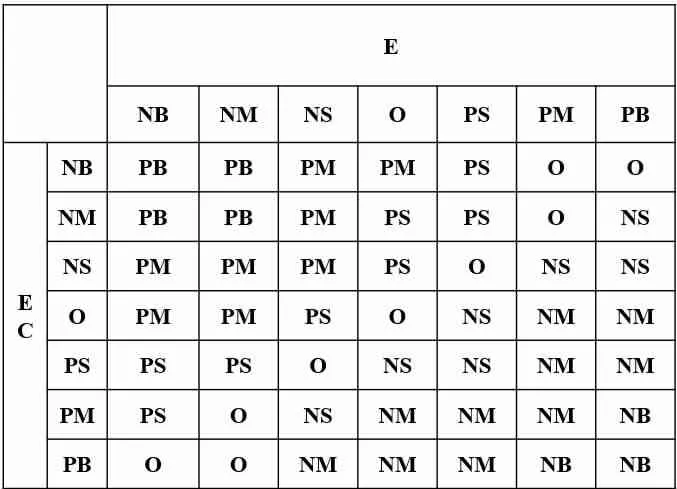
表1 ΔKp 模糊控制規則表
根據上訴模糊規則表,通過模糊推理得到PID 參數的模糊矩陣表,查出PID 參數修正參數代入下列公式計算:
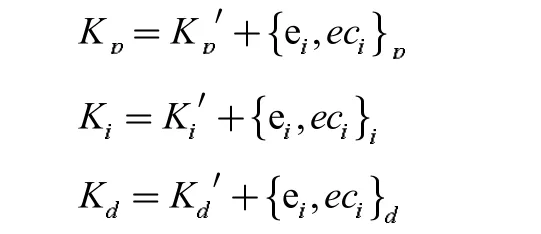
式中,K'p、K'i、K'd是常規PID 參數。
2.3 輸出反模糊化
通過模糊推理得到的結果是一個模糊集合,不能直接用來作為控制量,需要通過解模糊轉化為精確數,才可以作為PID參數的校正值,實現模糊自整定功能。常用的PID 反模糊化方法有最大隸屬度法、重心法、加權平均法。
3 仿真與分析
本文利用MATLAB 軟件設計了模糊PID 控制系統的仿真模型如圖5 所示,其中模糊控制器模塊如圖6 所示。
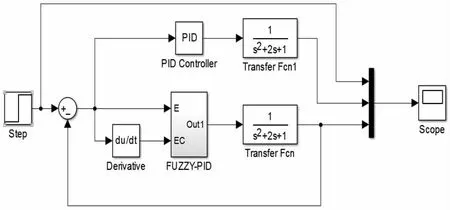
圖5 模糊PID 控制系統仿真模型
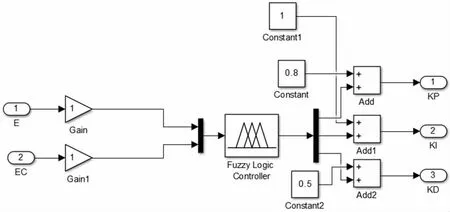
圖6 模糊控制器摸塊
被控對象等效為:G(s)=l/(s2+2s+1)。
采用階躍信號作為輸入,得到常規PID 控制器和模糊PID控制器的輸出響應曲線如圖7 所示。通過對比可知,模糊PID控制超調量更小,響應時間更短、反應速度更快。這表明對于工業廢水PH 值處理,采用模糊PID 控制效果更好,性能更佳。
猜你喜歡
作文周刊·小學一年級版(2022年28期)2022-05-30 10:48:04
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
法律方法(2019年3期)2019-09-11 06:26:16
中國外匯(2019年7期)2019-07-13 05:44:52
幸福(2018年33期)2018-12-05 05:22:42
環球飛行(2018年7期)2018-06-27 07:26:14
Coco薇(2017年11期)2018-01-03 20:59:57
暨南學報(哲學社會科學版)(2016年9期)2017-01-15 13:52:02
運動(2016年6期)2016-12-01 06:33:42