一種應用于自動駕駛車輛的冗余低壓電網系統
2021-08-24 09:00:34顧強源張鐵欣呂洪智耿偉峰
汽車電器 2021年8期
顧強源,張鐵欣,呂洪智,耿偉峰
(長城汽車股份有限公司 河北省汽車技術創新中心,河北 保定071000)
隨著全球化市場整車自動化駕駛的應用,各主機廠都在投入大量研發資源,致力于開發具有自動駕駛功能的車輛。自動駕駛車輛旨在解放駕駛員的雙手和雙眼,提高駕駛舒適性及安全性,在系統出現失效情況時,提醒駕駛員及時接管車輛,同時,冗余系統能夠自主控制車輛在出現故障后實現本車道停車或靠邊停車。
1 現狀
12V低壓電網作為整車電器功能部件的基礎供電保障,現有的電源系統架構中(圖1),當低壓電網供給系統出現短路、斷路等失效時,車輛的電源供給被切斷,自主行車控制部件將無法正常工作,存在車輛失控風險,危害司乘人身安全。
2 冗余低壓電網系統
本文意在介紹一種具有冗余功能的低壓供電系統方案,以解決在當前傳統電網架構下,通過較低的成本、較短研發周期、較小更改量,滿足具有自動駕駛功能對低壓電網系統的需求。
2.1 冗余電網架構

圖1 現有低壓電網系統
針對車輛低壓供電系統,采用雙電池+雙隔離部件的冗余低壓電網系統框圖(圖2)方案,通過使用備份的低壓電源供給系統為車輛自動駕駛控制系統、冗余轉向系統、冗余制動系統等提供電源供給,滿足自動駕駛車輛控制、轉向、制動、燈光功能的電源冗余需求。當車輛任意一路主干電源出現故障時,電源隔離部件能夠快速響應,斷開故障回路,保證系統回路中有一路正常電源供給,實現車輛自動靠邊停車或本車道緊急停車。
2.2 冗余低壓電網系統組成說明
1)發電裝置:在車輛啟動后為整車用電設備供電,同時可以為主電池、副電池充電。
2)主電池:向起動機提供瞬時大電流,保證發動機在各種情況下能夠可靠起動;在車輛不啟動時,為整車負載供電;在發動機怠速或停機時能在一定時間內保證用于其他重要系統所需的部分或全部電能。
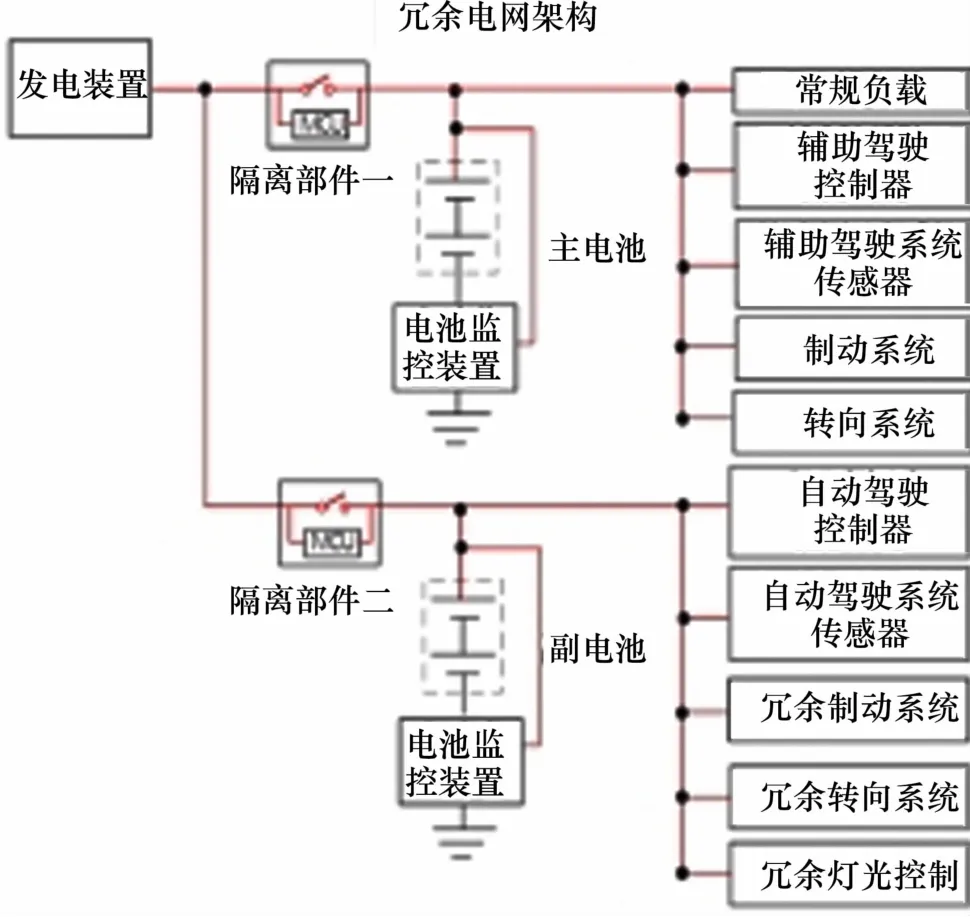
圖2 冗余低壓電網系統框圖
3)副電池:為副電池側的用電設備供電。
4)隔離部件:連接發電裝置、主電池、副電池主回路,實現電源主回路的導通與隔斷。自身具備邏輯診斷及運算能力,在電網系統中出現過壓、欠壓故障時,開關斷開,保證主電池、副電池兩側的電網系統相對獨立,互不影響;在主電池側與副電池側各安裝有一個隔離部件。
5)電池監控裝置:用于檢測蓄電池的電壓值、健康狀態,及蓄電池連接的回路是否導通,在主電池側與副電池側各安裝有一個電池監控裝置。
6)自動駕駛控制器:作為自動駕駛的主控制器,通過采集傳感器信號與整車其他控制器模塊交互,進行自動駕駛的邏輯判斷,實現車輛的自動駕駛控制;當檢測到影響自動駕駛功能實現的故障時,提示顧客接管,若駕駛員未接管,則自動控制車輛實現靠邊停車或本車道緊急制動。
7)自動駕駛系統傳感器:為自動駕駛控制器提供準確的車輛及路況信息的傳感器、攝像頭等。
8)輔助駕駛控制器:作為自動駕駛的輔助控制器,通過采集傳感器信號,與整車其他控制器模塊交互,當自動駕駛控制器出現異常時,車輛的輔助駕駛控制器自動控制車輛實現靠邊停車或本車道緊急制動。
9)輔助駕駛系統傳感器:為輔助駕駛控制器提供準確的車輛及路況信息的傳感器及攝像頭等。
10)制動系統:為主制動系統,包含制動系統傳感器、控制器及執行器,在自動駕駛功能場景下,接收自動駕駛控制器或輔助駕駛控制器的工作指令,實現自動制動及駐車功能。
11)冗余制動系統:為輔助制動系統,包含輔助制動系統傳感器、控制器及執行器,在自動駕駛功能場景下,當制動系統出現故障時,冗余制動系統接收自動駕駛控制器或輔助駕駛控制器的工作指令,實現自動制動及駐車功能。
12)轉向系統:為主要轉向控制系統,包含轉向系統傳感器、控制器及執行器。在自動駕駛功能場景下,自動駕駛控制器或輔助駕駛控制器發出轉向工作指令到轉向系統,實現車輛自動轉向功能。
13)冗余轉向系統:為輔助轉向控制系統,包含備份的轉向系統傳感器、控制器及執行器;使用帶雙繞組的轉向電機,連接到副電池。在自動駕駛功能場景下,自動駕駛控制器或輔助駕駛控制器發出轉向工作指令時,雙繞組電機參與工作實現車輛轉向,當其中任意一路轉向電機故障時,另一路轉向控制器控制轉向電機降級工作,實現車輛自動轉向功能。
14)常規負載:為車輛正常工作所連接的電氣負載,包括動力系統、燈光系統、舒適娛樂系統等車用電器件。
15)冗余燈光控制:為自動駕駛下的后部告警燈冗余控制系統,在自動駕駛功能場景,常規燈光系統故障后,冗余燈光控制系統接收到自動駕駛控制器的燈光工作指令,驅動告警燈點亮,提示其它交通參與者,避免危害事件的發生。
3 系統工作狀態轉化
1)當車輛電源模式為OFF時(圖3),隔離部件一、隔離部件二都處于斷開狀態(圖2),由主電池為輔助駕駛控制器、輔助駕駛系統傳感器、制動系統、轉向系統、常規負載供電;副電池為自動駕駛控制器、自動駕駛系統傳感器、冗余制動系統、冗余轉向系統、冗余燈光控制系統供電。

圖3 電源模式OFF時,隔離部件工作流程

圖4 電源模式ON時,隔離部件斷開工作流程
2)當車輛電源模式為ON,且發電裝置端電路故障時,見圖4,隔離部件一、隔離部件二處于斷開狀態見圖2,由主電池為輔助駕駛控制器、輔助駕駛系統傳感器、制動系統、轉向系統、常規負載供電;副電池為自動駕駛控制器、自動駕駛系統傳感器、冗余制動系統、冗余轉向系統、冗余燈光控制系統供電。
3)當電源模式為ON,車輛處于工作狀態時(圖5),隔離部件一的開關與隔離部件二的開關均處于閉合狀態(圖6),發電裝置為輔助駕駛控制器、輔助駕駛系統傳感器、制動系統、轉向系統、常規負載、自動駕駛控制器、自動駕駛系統傳感器、冗余制動系統、冗余轉向系統、冗余燈光控制系統供電,主電池及副電池為發電裝置。

圖5 兩隔離部件均導通工作流程
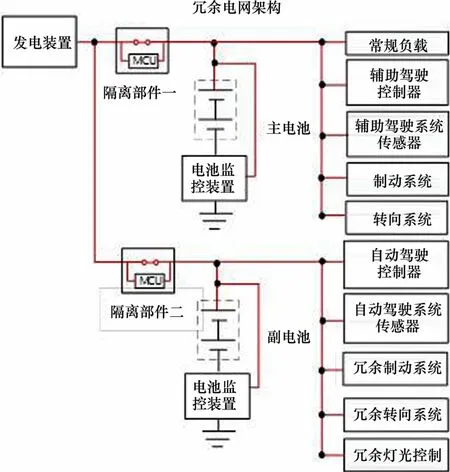
圖6 電源模式ON時,隔離部件斷開工作流程
4)當電源模式為ON,如隔離部件一檢測到主電池側出現超過其限值的參數(圖7),則隔離部件一的開關斷開,隔離部件二的開關導通,發電裝置為隔離部件二連接的自動駕駛控制器、自動駕駛系統傳感器、冗余制動系統、冗余轉向系統、冗余燈光控制系統供電(圖8)。

圖7 隔離部件一開關斷開,隔離部件二開關閉合工作流程

圖8 隔離部件一開關斷開,隔離部件二開關閉合狀態

圖9 隔離部件一開關閉合,隔離部件二開關斷開工作流程
5)當電源模式為ON,如隔離部件二檢測到副電池側出現超過其限值的參數,流程見圖9,則隔離部件二的開關斷開,隔離部件一的開關導通,發電裝置為隔離部件一連接的主電池、輔助駕駛控制器、輔助駕駛系統傳感器、制動系統、轉向系統、常規負載供電,見圖10。
4 方案亮點及效果
1)此方案在現有的架構平臺上增加了一個蓄電池,使用兩個隔離部件,實現低壓電源供給的冗余,通過兩路獨立的電源供給,滿足自動駕駛車輛的控制、轉向、制動、燈光功能的電源冗余需求。
2)本方案新增電源電路部分,可以與現有的架構共同存在,不會對現有架構造成沖突,以較低的成本、較短周期、較小更改量,應用于現有架構平臺。
3)本方案新增電源電路部分,可以實現車輛冗余轉向、制動、燈光的單獨供電。
4)本方案中隔離部件具有電源回路的電壓、電流異常檢測功能,在超出其限定值后能夠快速切斷故障回路,保證低壓電源系統的正常供給。
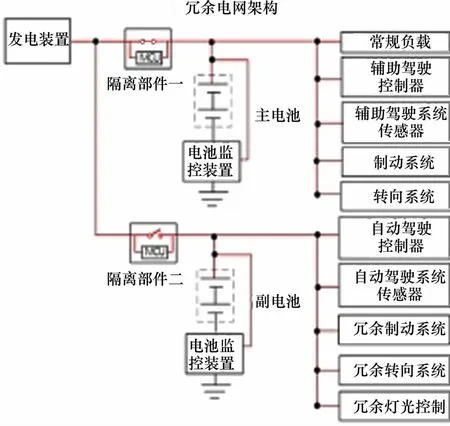
圖10 隔離部件一開關閉合,隔離部件二開關斷開
5)本方案中隔離器可以替代充電熔斷絲使用,其響應時間為ms級,實現快速響應,避免控制器因電壓異常波動而出現重新啟動造成功能失效。
5 結束語
為了滿足車輛自動駕駛功能的需求,提升車輛出現單點故障后的功能可用性,需要對車輛低壓電網系統增加冗余的設計,本方案通過使用電源隔離控制器,對主電源回路診斷,當主電源回路出現故障時能夠快速切斷故障回路,并能持續地提供車輛制動、轉向及后續安全工作所需要的電量,消除傳統電源系統中電源系統失效帶來的危害,保障司乘人員的安全。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
中國科技論壇(2017年7期)2017-07-25 08:49:53
媽媽寶寶(2017年2期)2017-02-21 01:21:24
國際漢語學報(2016年1期)2017-01-20 08:21:20
