一種基于Zynq7020的無線采集定位系統的設計與研究
2021-08-26 03:29:34高小鵬陳若彤
物聯網技術 2021年8期
高小鵬,陳若彤
(1.西安精準測控有限責任公司,陜西 西安 710075;2.西北工業大學 自動化學院,陜西 西安 710072)
0 引 言
目前大多數投擲場的落點定位依靠人工定位或測量,但是實踐中,測試場地的環境往往很復雜,而且排查范圍往往較大(比如查找半徑500 m),如果僅依靠原始方法查找落點準確位置,不僅費時費力,還經常會發生找不到落點準確位置的情況。如何高效地利用現有物聯網技術進行實驗場地的信息化改造,已經成為場地管理方非常重視的問題。基于此,本文提出了一種高精度無線定位的測量系統設計。該系統充分利用成熟的物聯網技術,具有目標落點定位精度高、系統響應速度快等優點,在數字化的空場的改造、升級等方面,具有很好的應用場景。
1 系統組成簡介
本文設計的無線定位采集系統由記錄控制模塊、無線傳輸模塊、基準站模塊和上位機模塊4部分組成。系統總體框圖如圖1所示。
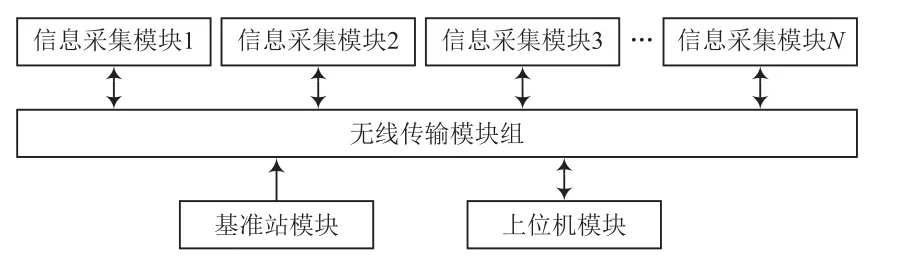
圖1 系統總體框圖
2 信息采集模塊
2.1 信息采集模塊硬件組成
本模塊的核心處理器選用Xilinx公司的Zynq?-7000系列芯片。Zynq?-7000系列產品基于Xilinx SoC架構,集成了功能豐富的雙核ARM?CortexTM-A9處理系統(PS)和28 nm Xilinx可編程邏輯(PL)。ARM Cortex-A9 PS(ARM)的核心部分包括片上存儲器、外部存儲器接口和一組豐富的外設連接接口。PL(FPGA)部分有可配置的邏輯、DSP模塊以及可編程I/O接口。無線定位采集系統采用Zynq-7020模塊,這樣既可以利用FPGA強大的并行計算能力和豐富的邏輯資源,同時又結合了ARM實現復雜控制和方便的接口交互能力。其中,無線通信模塊選用加拿大Microhard公司的P900無線數傳電臺。P900是一款尺寸小巧、穩定可靠、成本低廉、具備真正的Mesh、自動路由、存儲&轉發、低功耗休眠等特點的成熟數據鏈模塊。超高精度ADC采樣模塊選用美國ADI公司的高精度數/模轉換模塊AD7760。AD7760是一款高性能、24位Σ-△型模/數轉換器(ADC),融合了寬輸入帶寬、高速特性與Σ-△轉換技術的優勢,2.5 MSPS時信噪比可達100 dB,因此非常適合高速數據采集應用。信息采集模塊硬件原理框圖如圖2所示。
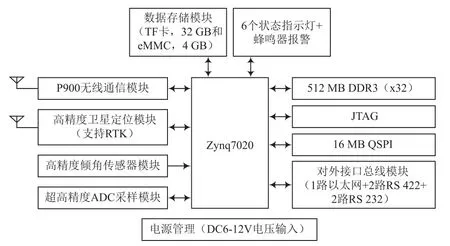
圖2 信息采集模塊硬件原理框圖
2.2 信息采集模塊軟件部分
信息采集模塊包括3個傳感器模塊、1個XC7Z020模塊、1個GPS移動站模塊、1個無線通信模塊、1個傾角模塊和電源電壓監視模塊。FPGA的主要功能是進行并行高速采集控制、循環隊列存儲以及授時差分控制。ARM模塊的主要功能包含參數配置及查詢、數據搬移及文件系統寫入eMMC、傾角解算和GPS授時定位。FPGA和ARM模塊通過AXI lite進行信號交互以及參數配置查詢,通過DMA模塊進行數據搬移。ARM通過文件系統記錄觸發時間、記錄觸發前5 000條和觸發后15 000共計20 000條數據,以及觸發時的其他狀態信息。信息采集模塊軟件功能流程如圖3所示。
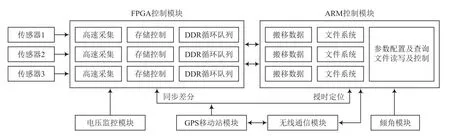
圖3 信息采集模塊軟件功能流程
FPGA完成同步差分授時功能,保證時間分辨率達到10 ns,確保記錄文件能精確反映真實的觸發時間。通過高精度低漂移晶振和鎖相環保證FPGA時鐘的精度,再由FPGA進行時間等分,使FPGA記錄觸發時間分辨率達到10 ns,之后通過PPS清除長時間可能產生的時鐘漂移。同步差分授時模塊流程如圖4所示。
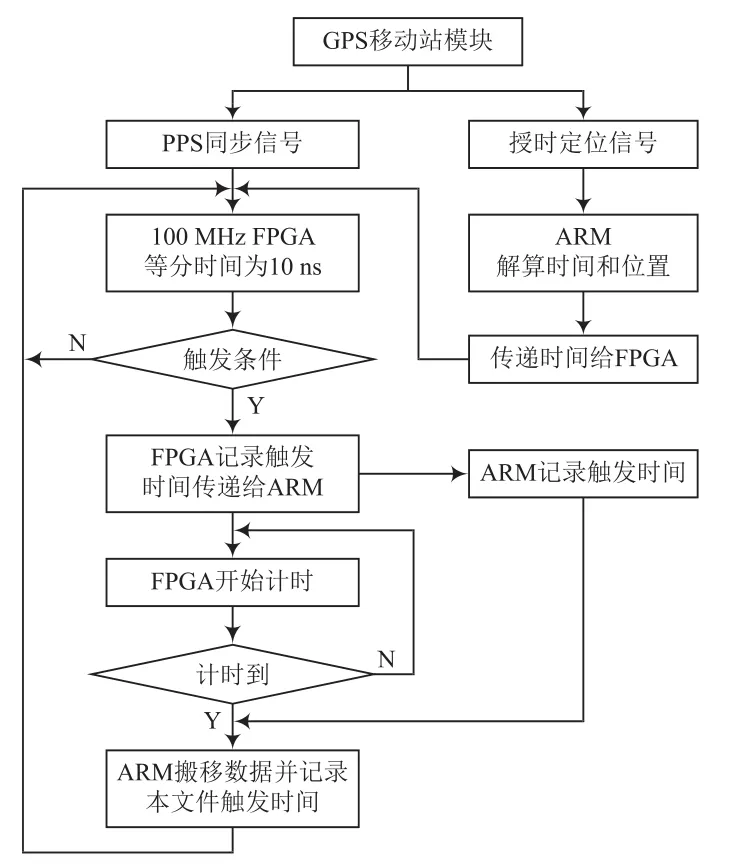
圖4 同步差分授時模塊流程
傳感器可能產生噪聲抖動使保存數據無效,為了保存有效的數據,產品中采用滑動窗口的方式,即窗口內有連續5個點數據超過觸發點電壓,則認為是真正的觸發點。當產品觸發記錄數據后,則不在比較滑動窗口內的數據,直到下一次數據采集。
高精度衛星定位系統通過載波相位差分技術RTK實現厘米級精度定位。多個記錄控制模塊部署在不同位置,結合高精度定位RTK和高精度高速率ADC,能夠精準分析每一個部署地甚至整個片區發生的情況。通過事后分析可還原觸發前后發生的相關信息并推導可能的影響。設置合適的觸發門限和優化記錄控制模塊的排列方式可以優化產品整體效果。
上位機配置ADC的采樣頻率和觸發電平,配置后進入數據循環記錄步驟。因需保存觸發前5 000條數據且觸發是隨機產生的,所以FPGA需要一直保存數據到DDR循環隊列中。當滿足觸發條件時,FPGA鎖定觸發時間并且開始計時,根據采集頻率定時15 000條數據并通知ARM。ARM產生中斷并搬移20 000條數據到eMMC,并記錄觸發時間、觸發時的經緯高等信息。記錄完成后ARM配置FPGA開始下一輪數據采集。數據記錄模塊流程如圖5所示。
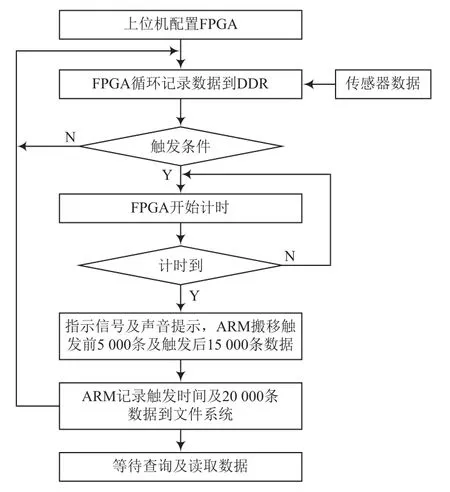
圖5 數據記錄模塊流程
3 上位機部分
上位機采用C++語言 MFC框架編寫,界面采用Tab頁面設計,包括曲線繪制、狀態監測、歷史數據、通信檢測、拓撲結構和參數校準頁面。主控界面如圖6所示。

圖6 主控界面
先通過狀態監視頁面添加設備信息,然后通過掃描設備,查看當前通信狀態,如果設備異常離線,檢查是否通電或者有其他故障。
傳感器1和傳感器2可以設置從15.625 kHz~1 MHz的采樣速率。兩個傳感器可以配置相同,也可以不相同。傳感器1和傳感器2可以設置不同的觸發電平,也可相同。勾選觸發絕對值使其只有正電平才能觸發。觸發方式分為單獨觸發、單通道觸發全部和全部觸發。單獨觸發,指滿足觸發條件的通道記錄本通道相關數據。如果選擇通道1單通道觸發全部,則在通道1滿足觸發條件時同時記錄通道1和通道2的數據;選擇通道2單通道觸發全部類似。如果選擇全部觸發,則不論是哪個通道滿足觸發條件都同時記錄兩個通道的數據。
通過上位機可以對多個記錄控制模塊同時進行操作,快捷的配置多個相同功能的模塊。也可以對單個產品進行操作,從而給不同的記錄控制模塊設置不同的參數。
當記錄數據達到系統設定的條數時,則無法繼續記錄數據。通過查詢歷史文件按鈕查詢控制模塊的記錄文件數目和文件名字,如果已經寫滿,則需要清除設備數據。為防止誤操作,清除設備數據時需要數據密碼確認,清除成功后,上位機會提示清除成功。從站點狀態監測界面如圖7所示。
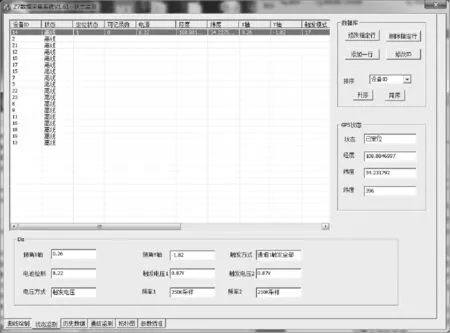
圖7 從站點狀態監測界面
設備信息和歷史數據頁面采用MySQL數據庫保存數據到本地,可高效方便地進行添加、刪除、排序等操作。查詢信息可查看產品是否定位、電源電壓、經緯高、傾角信息、設置的觸發電壓、觸發方式、采樣頻率等。
歷史數據關聯觸發時間、觸發方式、觸發電壓、經緯高和傾角信息,使數據分析更加精確。記錄控制模塊和上位機之間采用無線通信方式進行信息傳輸。因為無線傳輸的不可靠性,所以通過分包和握手機制保證數據傳輸的正確性。把20 000條數據分為2 000包,每一包數據加幀頭、數據長度、數據幀編號及CRC-32校驗。上位機收到數據時存入緩沖文件,如果校驗正確則把緩沖數據寫入文件繼續請求下一包數據;如果校驗不正確,則請求繼續重發本包數據,直到數據正確或者超過最大重傳次數;如果無線環境很差,連續N包數據都不正確,那么上位機會對本條數據標紅,并繼續讀取下一包數據。歷史數據查詢界面如圖8所示。
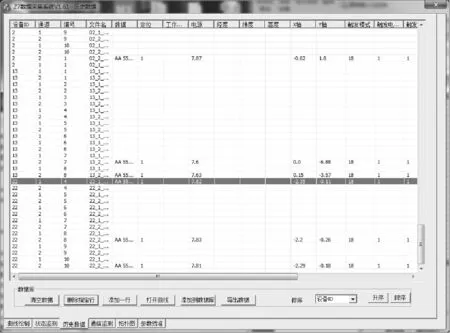
圖8 歷史數據查詢界面
因發生無線傳輸速率相對較慢,對于多產品多文件傳輸耗時較長,上位機可一次操作讀取多個產品多個文件,很大程度上減少了人工干預。加上容錯重傳機制,即使某個記錄控制模塊發生故障,產品仍能自動讀取文件,適合無人值守的環境。
拓撲結構頁面,通過曲線控件進行描點標識,更直觀的觀察產品的分布。實時觀察RTK定位的信息,方便的觀察產品的差分狀態。在進行RTK差分的時候,在拓撲結構頁面實時地顯示RTK精度,如果差分精度達不到要求,可對產品進行排查。采集端位置拓撲圖如圖9所示。
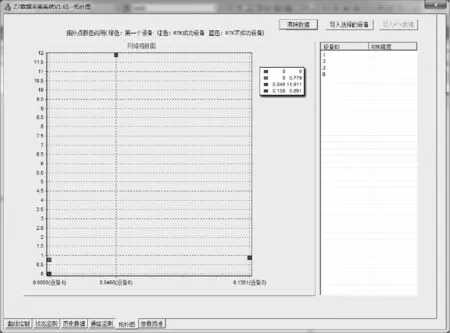
圖9 采集端位置拓撲圖
拓撲結構以RTK定位經度緯度數據為基礎,第一個產品定位為原點,其他產品分別與第一個產品求差值計算相對經緯度,通過如下公式把經緯度轉換到平面相對位置距離:
deltaX = (pos(:,2)-pos(1,2))·cos(pos(1,1))·Re
deltaY= (pos(:,1)-pos0(1,1))·Re
式中:pos表示位置緯度/經度(單位:rad);高度單位為m;Re表示地球半徑。
4 結 語
本系統經過外場測試,主控站觀測實驗結果表明,系統數據準確可靠、使用便捷。其中:無線網絡經過中繼之后,傳送距離大于3 km;經過RTK差分后,從站點定位精度在優于3 cm。在采樣頻率1 MHz時,采樣本底噪聲小于0.1 mV,GPS授時精度優于100 ns,達到了設計要求。
猜你喜歡
現代裝飾(2022年4期)2022-08-31 01:39:32
現代裝飾(2022年3期)2022-07-05 05:55:06
中華手工(2017年2期)2017-06-06 23:00:31
Coco薇(2015年1期)2015-08-13 02:23:50
中外會展(2014年4期)2014-11-27 07:46:46
玩具(2009年10期)2009-11-04 02:33:14
個人電腦(2009年9期)2009-09-14 03:18:46
舒適廣告(2008年9期)2008-09-22 10:02:48
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
