基于LED的水下光無線通信技術(shù)探究
2021-08-26 08:13:52閔亞洪
通信電源技術(shù) 2021年8期
閔亞洪
(江蘇省江陰中等專業(yè)學(xué)校,江蘇 無錫 214433)
0 引 言
地球的海洋面積約占70%左右,是人類賴以生存的重要環(huán)境之一,而隨著無線通信技術(shù)的發(fā)展,基于水下光無線通信技術(shù)研究已經(jīng)成為提升通信技術(shù)可靠性和安全性的核心技術(shù)領(lǐng)域[1]。但是無線通信技術(shù)在水下傳輸環(huán)節(jié)容易出現(xiàn)信號的分散,因此探究新型水下光無線通信技術(shù)具有重要的價值[2]。本文在此基礎(chǔ)上探究基于LED水下光無線通信技術(shù)系統(tǒng)的設(shè)計與實(shí)現(xiàn),希望可以為水下光無線通信技術(shù)的完善提供可行性借鑒。
1 基于LED的水下光無線通信傳輸特征分析
水下光通信時會受到光束擴(kuò)散的影響,發(fā)射光經(jīng)過準(zhǔn)直處理降低發(fā)射角。但是在海水的影響下會導(dǎo)致光束的擴(kuò)散,尤其是在長距離的傳輸中對水下光的影響更為顯著[3,4]。在水下光損耗中,根據(jù)泰勒級數(shù)tanθ≈θ可知。其損耗的表達(dá)為:

式中,z表示傳輸距離;Dt表示發(fā)射孔徑;Dr表示接收孔徑直徑;θ表示發(fā)散角。其中,r、z和θ之間的關(guān)系為:

通過式(2)發(fā)現(xiàn),在傳輸距離增加時,r會逐漸增大,而在固定傳輸距離時,r會隨著θ而變大。
如果光源較遠(yuǎn),則需要確定系統(tǒng)損耗[5]。可見光損耗與傳輸距離之間存在線性化關(guān)系為:
2 基于LED的水下光無限通信系統(tǒng)設(shè)計
2.1 系統(tǒng)結(jié)構(gòu)設(shè)計
在基于LED的模式下,需要實(shí)現(xiàn)通信系統(tǒng)的結(jié)構(gòu)設(shè)計,主要包括發(fā)射機(jī)、無線信道以及接收機(jī)幾個部分[6]。系統(tǒng)結(jié)構(gòu)如圖1所示。
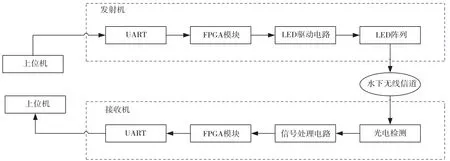
圖1 系統(tǒng)結(jié)構(gòu)設(shè)計圖
系統(tǒng)設(shè)計中,通過上位機(jī)FPGA的RS編碼設(shè)計可以提升系統(tǒng)的抗干擾能力,同時將脈沖信號輸送到LED電路,之后抵達(dá)接收端,最后經(jīng)過軟件濾波處理后傳遞到PC機(jī)[7]。
2.2 系統(tǒng)軟件MDPCM解調(diào)的FPGA選擇
本次研究系統(tǒng)軟件的選擇方式中,應(yīng)用MDPCM解調(diào)的FPGA軟件模式。其中FPGA的芯片型號選擇INTEL公司生產(chǎn)的EP4CE6322C8N。MDPCM屬于衍生產(chǎn)品,采用FIFO緩存調(diào)制模式,經(jīng)過輸出處理,會形成DPCM-OUT波形。
在解調(diào)環(huán)節(jié),需要實(shí)現(xiàn)軟件濾波器的功能,在HDL設(shè)計以及D觸發(fā)器的基礎(chǔ)上實(shí)現(xiàn)濾波處理。在MDPCM解調(diào)環(huán)節(jié),采用最大似然概率判定模式,基本表達(dá)式為:

經(jīng)過系統(tǒng)判定及解調(diào)原理判定計數(shù)位于的區(qū)間,進(jìn)而輸出解調(diào)數(shù)據(jù)。
2.3 系統(tǒng)電路設(shè)計
系統(tǒng)電路的設(shè)計包括光源、驅(qū)動電路以及UART電路等多個環(huán)節(jié),本次研究對核心電路進(jìn)行設(shè)計,主要內(nèi)容如下。
2.3.1 LED驅(qū)動電路
系統(tǒng)經(jīng)過FPGA解調(diào)后,信號通過I/O接口,電平設(shè)計為3.3 V,電流最大限流為40 mA,通過驅(qū)動電路中的三極管以及MOS管可以實(shí)現(xiàn)功率放大[8]。本次研究中,LED光源驅(qū)動電路如圖2所示。
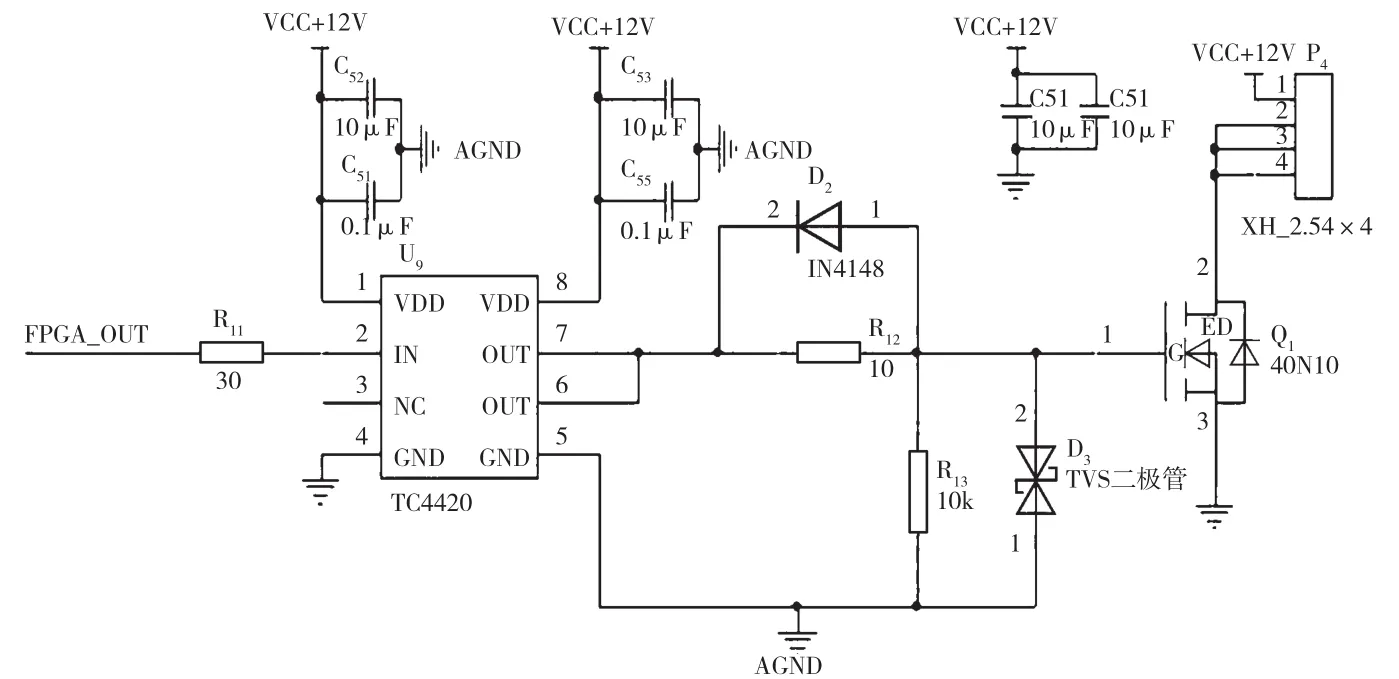
圖2 LED光源驅(qū)動電路設(shè)計圖
本次研究中,選擇NMOS的型號是SUD40N10-25-E3,擊穿電壓和電流分別為100 V和40 A,電路會將電信號轉(zhuǎn)化成為光信號來傳輸信息。
2.3.2 光電探測器選型及放大電路的設(shè)計
光電探測器屬于光信號和電流信號的轉(zhuǎn)化裝置,常見探測器包括光電晶體管、光電倍增管以及光敏電阻等。本次研究中,基于PIN管的優(yōu)良轉(zhuǎn)換性特征,選擇濱松公司的S6968型號光電探測器,接收直徑和面積分別為14 mm和150 mm2,頻率為50 MHz[9]。
對于整體放大電路的設(shè)計,在接入PIN管后,需要轉(zhuǎn)換電路的整體電流和電壓,以此來確保電路的功能。第一級別電路需要確保噪聲相對較小的原則,因而選擇集成的跨阻前置放大器來進(jìn)行轉(zhuǎn)換。該模塊具有光導(dǎo)和光伏的運(yùn)行模式,在工作時,PIN管具有方向電壓,會導(dǎo)致電容變小,之后在光電探測器的影響下會產(chǎn)生干擾電流,影響接收機(jī)的運(yùn)行。因此,在選擇S6938模式的基礎(chǔ)上采用光導(dǎo)的運(yùn)行模式。系統(tǒng)電路結(jié)構(gòu)如圖3所示。
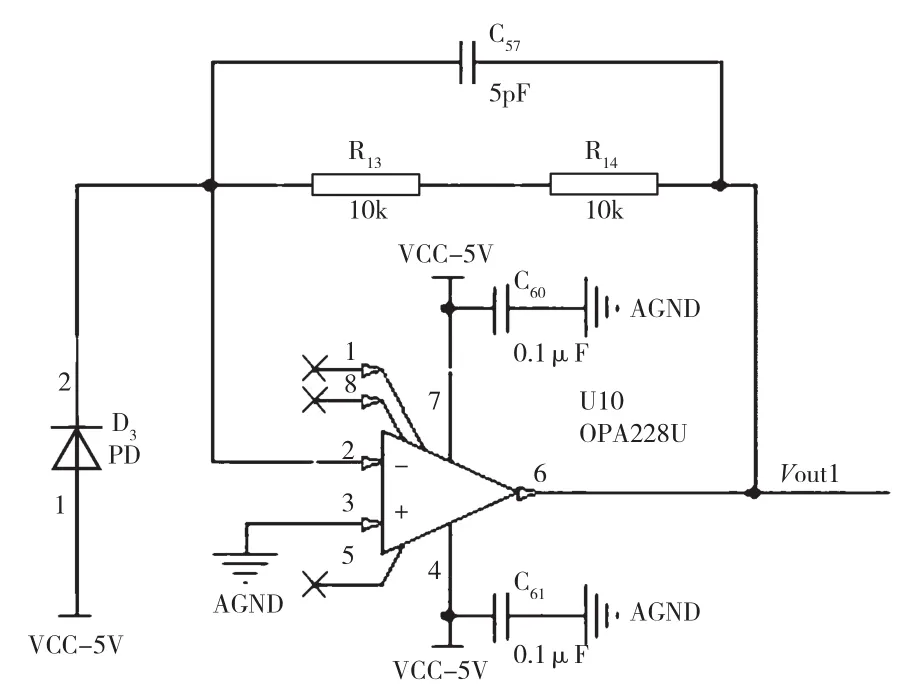
圖3 系統(tǒng)放大電路設(shè)計圖
在系統(tǒng)放大電路的設(shè)計中,采用OPA228實(shí)現(xiàn)對信號的轉(zhuǎn)換,然后通過電阻R13和R14計算反饋電阻。在放大電路的設(shè)計中,會在電阻上設(shè)計反饋電容,通過集成的方式實(shí)現(xiàn)補(bǔ)償,之后對各級電路進(jìn)行放大,另外采用±5 V的供電模式。
2.4 基于帶通濾波和脈沖整形階段的電路設(shè)計
在系統(tǒng)接收體系的建設(shè)中存在噪聲元件,因此在信號放大環(huán)節(jié),為了確保通信質(zhì)量,需要消除噪聲[10]。基于此,本次設(shè)計中采用四階巴特沃斯濾波器,頻率設(shè)計在3~30 kHz,整體上限頻率設(shè)計為30 kHz,電容為680 pF,根據(jù)仿真的原則確定該選擇符合系統(tǒng)的運(yùn)行需求。
在接收信號時,系統(tǒng)需要通過FPGA的方式來進(jìn)行解調(diào),將信號轉(zhuǎn)換成為模擬信號,但由于FPGA在系統(tǒng)的運(yùn)行環(huán)節(jié)并無識別的功能,因此首先需要將信號轉(zhuǎn)化成為數(shù)字信號。在本次設(shè)計中,采用電壓比較器來進(jìn)行信號模式的轉(zhuǎn)換,型號為LM393,具體的電路設(shè)計如圖4所示。在系統(tǒng)高電平的數(shù)值為1時,低電平為0,模擬信號會通過比較器來實(shí)現(xiàn)信號的轉(zhuǎn)換,而電阻則為2~10 kΩ。在函數(shù)信號中,輸出信號存在180°的相位差,因此需要對信號進(jìn)行反相處理。

圖4 脈沖整形階段電路設(shè)計圖
3 系統(tǒng)測試
3.1 串口、發(fā)射和接收階段的測試
在串口測試階段,通信協(xié)議選擇RS232,之后應(yīng)用字節(jié)的方式來接收數(shù)據(jù)。模塊主要包括發(fā)送模塊和接收模塊,通過下載FPGA接收代碼,驗(yàn)證串口調(diào)試成功。
在本次設(shè)計的發(fā)射模塊中,通過USB的方式實(shí)現(xiàn)PC及RS232串口連接。信號轉(zhuǎn)換環(huán)節(jié)通過FPGA方式進(jìn)行轉(zhuǎn)換,將二進(jìn)制8位轉(zhuǎn)換成為4位,之后對RS進(jìn)行編碼。處理過程中,轉(zhuǎn)碼完成后,經(jīng)過MDPCM進(jìn)行調(diào)制處理。將頻率設(shè)為200 kHz,經(jīng)過調(diào)制,完成信號的轉(zhuǎn)換。此外,發(fā)射端的調(diào)試中主要結(jié)構(gòu)包括PC、電源、示波器、LED以及發(fā)射電路,同時包括FPGA和UART模塊。
接收模塊主要負(fù)責(zé)實(shí)現(xiàn)光電信號的轉(zhuǎn)換,在本次設(shè)計中,采用S6968信號的轉(zhuǎn)換器,接收電路信號后會對信號進(jìn)行處理,之后輸入FPGA。在數(shù)據(jù)信號的處理過程中,應(yīng)用軟件的濾波處理模式實(shí)現(xiàn)對尖峰脈沖信號的調(diào)整,然后在FPGA的模塊中設(shè)計對應(yīng)的解調(diào)解碼,恢復(fù)數(shù)據(jù),并將信號傳遞到PC端。
在接收模塊的設(shè)計中,主要包括同步、濾波、解調(diào)、串口以及解碼等環(huán)節(jié)。發(fā)射端和接收端之間會存在相差,并且達(dá)到180°,因此在接收數(shù)據(jù)完成后,需要對數(shù)據(jù)進(jìn)行反相處理,最終確保數(shù)據(jù)的一致性與準(zhǔn)確性。RS解碼階段,IP參數(shù)方式存在一定的差異,需要將reset的代碼拉高,之后在解碼時實(shí)現(xiàn)復(fù)位處理,否則將會導(dǎo)致出現(xiàn)解碼異常。在頻率調(diào)整環(huán)節(jié),將頻率設(shè)計為200 kHz,信號主要是通過MOS管來調(diào)整波形,最后通過放大電路形成具體波動圖形。
3.2 實(shí)驗(yàn)測試結(jié)果
本次研究基于清澈海水,海水中包含溶解鹽及懸浮顆粒,并且氯化鈉的含量達(dá)到90%以上。為了測試系統(tǒng)的性能,了解在水下的運(yùn)行準(zhǔn)確率,在發(fā)射階段循環(huán)發(fā)送1到F的十六進(jìn)制數(shù)字,通過系統(tǒng)RS解碼方式將數(shù)據(jù)劃分為3個組別,之后對數(shù)據(jù)進(jìn)行編碼。在每組數(shù)據(jù)中設(shè)計超幀,調(diào)制完成后,應(yīng)用LED陣列發(fā)送數(shù)據(jù),根據(jù)接收的數(shù)據(jù)和發(fā)送的數(shù)據(jù)對比,確定解碼的準(zhǔn)確率。實(shí)驗(yàn)過程中需要對數(shù)據(jù)進(jìn)行多次測試,在溶解鹽的影響中發(fā)現(xiàn)500 kHz的環(huán)境下自來水的誤碼率為7.45×10-6,7%溶解鹽中的誤碼率為6.32×10-6,15.56%溶解鹽中地誤碼率為5.85×10-6,總體并無顯著的差異,其可能是由于溶解鹽會對較短的波長進(jìn)行吸收,而不會對LED可見光產(chǎn)生一定的影響。
在懸浮顆粒的影響方面,確定海水的懸浮顆粒對測試結(jié)果的影響。在水質(zhì)中加入氫氧化鋁和氫氧化鎂的混合物,頻率設(shè)計為500 kHz。在清水測試時,并無明顯的差異,而在渾濁度達(dá)到40 g/m3的情況下,數(shù)據(jù)的錯誤率相對較高。其中,在500 kHz的環(huán)境下,自來水的誤碼率為8.25×10-6,16.13 g/m3渾濁度的情況下,誤碼率為6.02×10-4,24.19 g/m3渾濁度的情況下,誤碼率1.56×10-2,在40 g/m3的情況下,系統(tǒng)出現(xiàn)丟幀的特征。可見,懸浮顆粒對于系統(tǒng)的準(zhǔn)確率具有顯著的影響,因此在使用系統(tǒng)環(huán)節(jié),需要對水質(zhì)的環(huán)境進(jìn)行分析。
4 結(jié) 論
本文主要探究水下光無線通信傳輸系統(tǒng)的設(shè)計與實(shí)現(xiàn),首先確定系統(tǒng)結(jié)構(gòu)設(shè)計,包括上位機(jī)、發(fā)射機(jī)以及接收機(jī)等幾個組成部分,軟件系統(tǒng)采用MDPCM解調(diào)的FPGA,此外在系統(tǒng)電路設(shè)計中設(shè)計了LED驅(qū)動電路、放大電路以及脈沖整形電路等核心電路結(jié)構(gòu)。其次,對系統(tǒng)進(jìn)行測試,發(fā)現(xiàn)發(fā)射和接收階段達(dá)到測試目標(biāo),并且溶解鹽濃度對測試結(jié)果并無顯著影響,而懸浮顆粒濃度在40 g/m3以上時則容易造成丟幀,影響信息傳輸。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
