多翼無人機自動避障技術在輸電線路巡檢中的應用
2021-08-26 08:14:04王振華郭方勇朱敏杰
通信電源技術 2021年8期
王振華,周 云,郭方勇,朱敏杰
(深圳供電局有限公司輸電管理所,廣東 深圳 518000)
0 引 言
近些年來,隨著國家經濟建設快速發展,電力需求旺盛。結合國家能源戰略部署、西電東輸項目投入運營以及超、特高壓輸電線路應用,國家大電網格局基本實現。但是,我國幅員遼闊,地形氣候復雜多變,自然災害頻發,再加上動植物、飛鳥侵入,自然極端天氣影響,人為因素干擾,輸電線路距離長、分散性大、難以維護等因素的存在,給電網安全運行帶來諸多隱患。因此,需要利用無線網絡通信技術、無人機技術以及圖像處理和衛星定位等先進智能技術,定期巡查輸電線路及電網周邊環境,開展線路日常維護,排除各種隱患,及時掌握輸電線路動態信息,保障國家經濟建設及人民日常生活穩定。
利用無人機對高壓輸電線巡檢,解決了人工巡檢盲區問題,而且效率和巡檢質量極高,安全性較強。無人機通過攜帶的定位設備、拍照設備以及多種無線傳感器設備等,可以精準定位出隱患或故障位置,并利用自動避障技術解決了發生碰撞等事故的情況,安全度極高[1-4]。操作人員利用可視化系統和無線遙控裝置能夠及時掌握無人機的飛行軌跡、飛行狀態、巡檢拍照、各種數據采集及狀態監測,實現了遠程控制和輸電線路巡線環境的重建,規范了輸電線路巡檢標準,拓寬了巡檢內容和范圍。
1 無人機自主避障技術系統設計方案
1.1 無人機自主避障設計思路
多旋翼無人機技術目前相對成熟,其結構設計輕巧,飛行控制系統穩定,操控性好、起降便利,便于運輸、攜帶,能夠高速機動飛行且可空中懸停,因此在輸電線路巡檢應用較為廣泛。多翼無人機攜帶的微型影像采集及圖像識別系統,可對飛行路線進行有效規劃,自動避開障礙物,巡檢安全性能較高[5]。而且電磁抗干擾性強,操作人員采用航模遙控器,控制信號頻率為2.4 GHz,消除了圖像傳輸信號頻率(5.8 GHz)的干擾影響。此外,無人機安裝有同頻率S-BUS接收機,接收機接收遙控器控制信號后傳送給避障系統,避障系統通過傳感器自動測量計算出無人機與故障物間的精準距離,對遙控器信號進行重構后,傳送到飛行穩定控制模塊,從而實現了無人機的精準避障功能。無人機避障技術主要采用超聲波、TOF、智能圖像識別處理以及測距識別技術等,通過云平臺系統實現測距、定位以及軌跡規劃等功能[6]。
1.2 自主避障功能實現
多翼無人機自動避障系統通過測距傳感器采集測距數據,云平臺對采集的控制信號和測距信號進行綜合處理。無人機通過舵機接收到地面遙控信號后激發出相同的一個周期為20 ms左右,寬度為1~2 ms的負向中位脈沖信號。兩個脈沖信號經過云平臺處理,獲得一個差值脈沖信號,云平臺判斷差值脈沖的正向或負向性后傳輸給遙控器。控制驅動系統飛行軌跡。云臺選擇多選擇控制精度高、反應靈敏以及穩定性好的設備,確保惡劣及復雜環境下無人機的穩定性和安全性[7]。
云平臺在處理過程中綜合運用威脅場、動力學約束狀態,根據巡檢線路進行幾何建模,對輸電線路無人機巡檢興趣點和威脅場進行三維建模。無人機巡檢作業時,根據GIS地理信息庫信息設置好輸電線路桿塔信息庫后,多翼無人機利用機載攝像機、超聲波傳感器將實時數據傳輸到操作視頻界面。無人機巡檢避障模型如圖1所示。

圖1 無人機巡檢避障模型
圖1中,X,Y表示經度和緯度坐標,實線表示待巡檢高壓輸電線路,小圓點表示巡檢線路中桿塔等標的物結點,圓形陰影區域則表示為障礙物或者稱為威脅場,虛線則為避障系統為無人機規劃的實際飛行預期航跡。巡檢線路三維模型視圖中,桿塔多簡化成圓錐體,頂端的“導線”進行桿塔的連接。圖中的圓柱體用于標識障礙物,無人機飛行過程中需要保障其安全性,為實現這一目的需要在三維模型中實現無人機飛行軌跡的規劃,有效規避威脅場。
2 硬件設計實現
2.1 電源模塊
Arduino UNO控制板作為超聲波傳感器及遙控器接收機的信息存儲單元,為了減少外界信息的干擾,采用外部獨立電源供電,圖2為系統供電模塊原理圖,Vin為電源輸入端口,允許輸入電壓范圍為5~10 V,A4端連接二極管,其單向導通的特性有效避免了系統元器件因電源極性接反而被燒毀的問題。
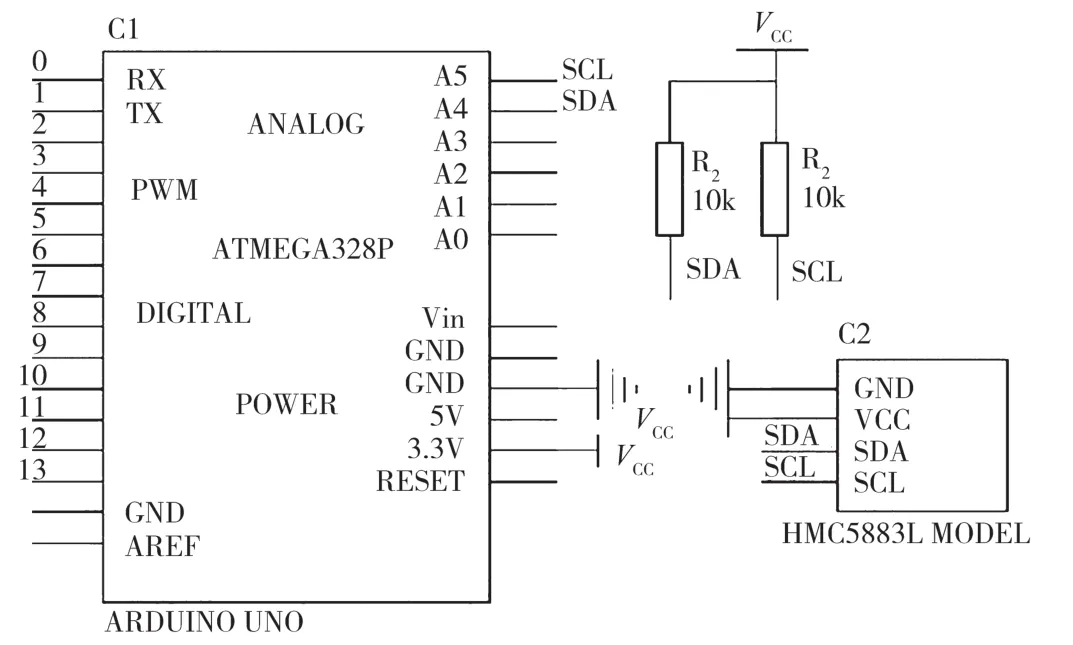
圖2 電源模塊圖
2.2 超聲波傳感器選型
綜合分析超聲波傳感器測距范圍、測量精度及其質量、體積與無人機負荷能力相適配等問題,選取尺寸、重量適中,測量范圍較大、精度較高型號為US100-Y401的超聲波測距傳感器,如圖3所示。
圖3 US100-Y401 的超聲波測距傳感器
3 軟件設計實現
無人機軟件控制流程如圖4所示。云臺控制中心接收遙控器接收機的信號后,及時對超聲波傳感器采集的距離信號進行綜合處理和判斷,制定出三維模型,標識出巡檢路線中的障礙物和興趣點,規劃出飛行軌跡。
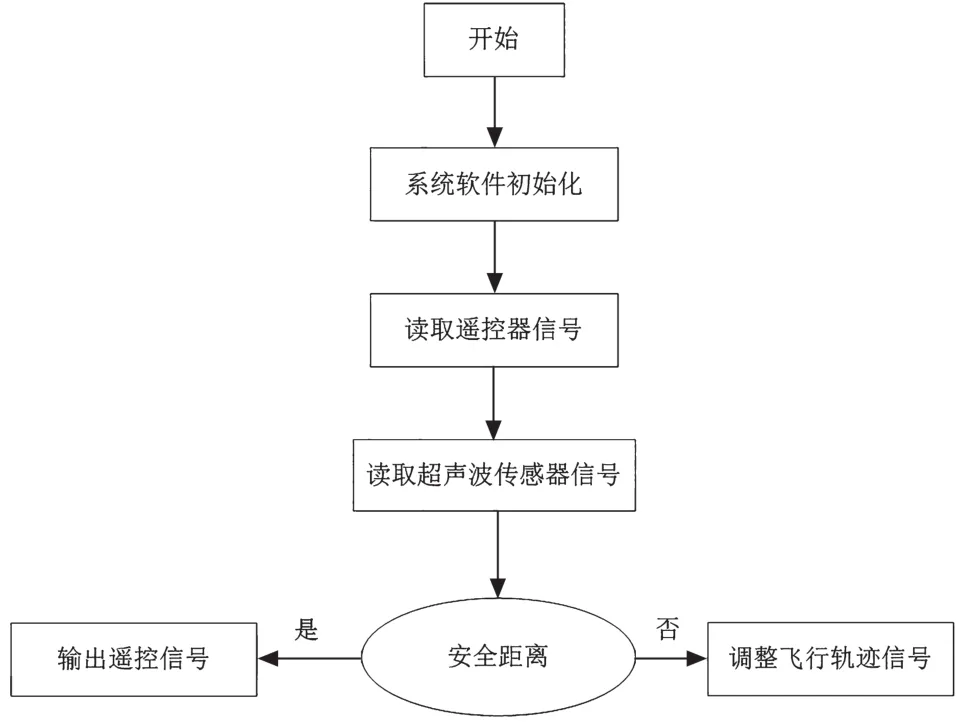
圖4 軟件流程圖
4 無人機航路智能規劃算法
為實現多翼無人機的功能,需要要在系統當中引入智能規劃算法,常用的算法包括幾何算法、粒子群算法、遺傳算法、模糊控制神經網絡以及蟻群算法等。本文采用BP神經網絡算法來實現避障功能。BP神經網絡算法在無人機航路智能規劃中的應用可很好實現無人機最大轉彎半徑、線路巡檢距離測算、規避障礙物等功能,利用算法獲得無人機飛行航路離散點陣。多旋翼無人機對輸電線路巡檢時,通過機載云平臺和攝像機獲取輸電線路中的興趣點,同時有效規避各種障礙物,進行輸電線路飛行軌跡規劃,對輸電線路路徑進行巡檢跟蹤。多旋翼無人機與輸電線路需要保持一定距離巡航,同時控制好飛行姿態[8]。
高壓輸電線路在GIS地理信息庫中具有固定的經緯度坐標,神經網絡算法可以簡化神經網絡層數,大大提高了算法效率。BP神經網絡算法采用最小均方差準則,實現指標權重和誤差修正。BP算法可以在MATLAB軟件中進行編碼,利用軟件庫進行仿真[9]。
BP學習訓練后,巡檢無人機能夠有效避開巡檢線路中的障礙物。對于誤差修正,第一個桿塔處航路點誤差為-5×10-5,后續誤差較小[10]。通過仿真能夠發現,BP神經網絡算法應用效果很好,基于此算法能夠得到極高的固定高度高壓輸電線路巡檢準確率。
5 結 論
無人機技術目前較為成熟,多翼無人機運用到高壓線路巡檢中解決了人工巡檢存在的諸多困難,而且巡檢效率和巡檢質量高、安全性好且成本較低。本文結合無人機特點,對自動避障技術進行分析和研究,通過應用測距傳感器和機載云平臺技術以及BP神經網絡算法,很好地實現了軟件仿真功能。并通過三維模型,利用可視化系統,實現了障礙物標識和飛行軌跡規劃,確保巡檢任務有效完成。隨著5G移動通信技術及大數據和云計算的應用,無人機在高壓線路巡檢過程的應用性能更加穩定,效果更好。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
